












【51CTO.com原创稿件】捡东西对我们来说是很平常不过的事情,但其并不像我们想的那么简单。想象下,如拿一个开口的酸奶,并不能仅仅靠视觉瞄准抓起来就OK,还要用触觉来感受。如果机器人来拿这个酸奶,它并没有触觉,那力度方面就会欠缺。
在“触觉”的研究上,科学家更多的是倾向于“皮肤”。这一次,哈工大的科学家们选择从“体毛”入手,看起来的确是一个不错的想法,不过,具体上其与“皮肤”谁更为“敏感”,目前还无从得知。
搜索一些资料了解到,之前对于机器人抓物的研究大都集中在建立围绕视觉反馈的智能上,数据库图像匹配是建立智能的方法之一。也就是让机器人利用照相机去发现目标物,并主导自己移动、抓物。在这个过程中,机器人将它们实时获取的信息和数据库里存储的3D影像作对比。一旦机器人发现了其中匹配项,那么它就可以找到可以应对当前情况的计算程序。
为了让机器人更为接近人类,科学家们一直在试图让机器人能够有“触觉”。为此,不少团队都进行了相关研究,也有了可观的成果,比如美国斯坦福大学化学工程教授鲍哲南领导团队研发的一种“数码皮肤”,其可以模仿人类的触觉,并将之传送至大脑,又比如韩国首尔大学开发出的一款新型毛状电子皮肤,能使机器人快速分辨出呼吸引起的轻微空气波动或者微弱的心跳震动,与此类似的还有很多。
近日,哈尔滨工业大学的科学家们研制出了一种“电子体毛”,将之装在机器人的“皮肤”上,可以让其显得更为“敏感”。
此“体毛”可不是我们自然皮肤上的体毛,不要脑补哦,哈哈哈......
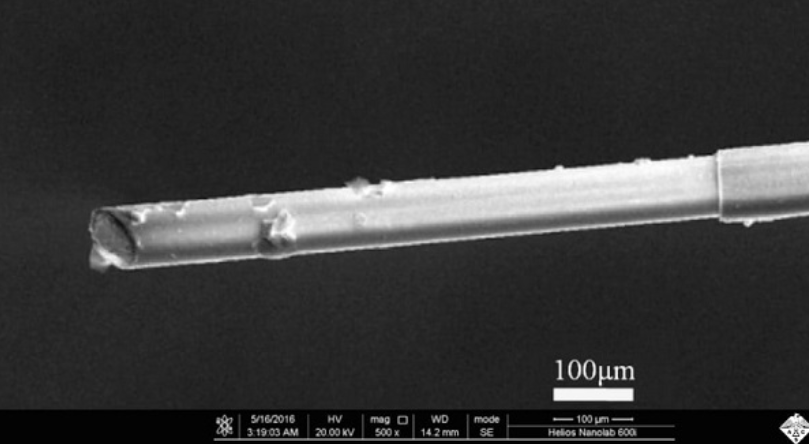
此“体毛”是一种突出于弹性皮肤的毛发状传感器阵列,由压敏(玻璃包覆)的钴基微丝制作而成,可以替代自然皮肤上的体毛。在使用中,这些磁性微丝的一端将扎入橡胶层中,与底下的电路板相连,另一端则透过橡胶层。
在实验室测试中,这些传感器可以感知多种刺激,像微风或是飞虫的降落等等。另外,若是配合机器手来抓取物品,该传感器还能感知物体的光滑度和摩擦力。
写在***,视觉在未来一定是机器人抓物的主要力量,但人工视觉到达一定阶段,触觉智能又是一个新的方向,有触觉智能的融入会使得机器人更加“敏感”。在未来,想要让机器人像我们一样洗衣做饭,可能还需要很长的路要走,如果真的有那么一天,我们会非常感谢这些研发触觉智能的科学家们。
了解更多热点新闻,请关注51CTO《科技新闻早报》栏目!

【51CTO原创稿件,合作站点转载请注明原文作者和出处为51CTO.com】















