摘要
本文介绍了自动驾驶汽车的运动预测:综述。近年来,自动驾驶领域吸引了越来越多的关注。准确预测各种交通参与者的未来行为对于自动驾驶汽车(AVs)的决策是至关重要的。本文主要研究基于场景和基于感知的自动驾驶汽车运动预测。本文提出了运动预测的形式化问题表述,并且总结了该研究领域面临的主要挑战。本文还详细介绍了与该领域相关的代表性数据集和评估指标。此外,本文将最近的研究分为两个主要类别:监督学习和自监督学习,它们反映了基于场景和基于感知的运动预测中不断发展的范式。在监督学习的背景下,本文深入检验并且分析了该方法的每个关键元素。对于自监督学习,本文总结了常用的技术。最后,本文总结并且讨论了潜在的研究方向,旨在推进AV技术这一重要领域的发展。
主要贡献
本文的贡献总结如下:
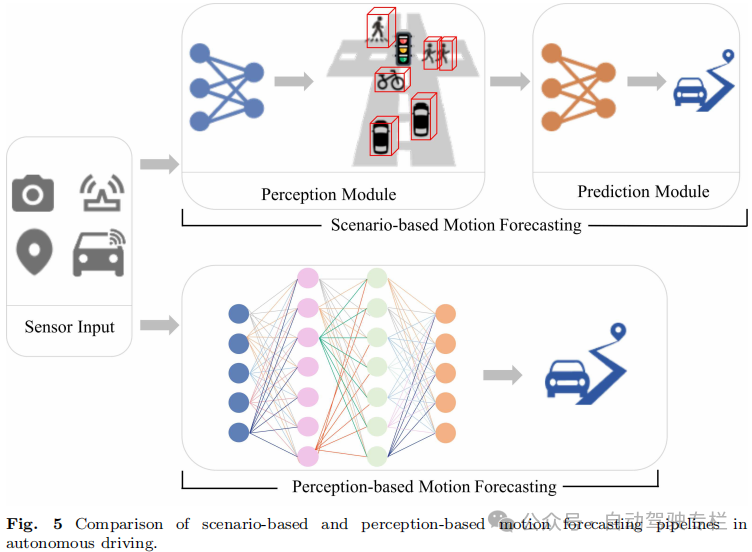
1)本文全面概述了自动驾驶汽车运动预测的最新研究,涵盖了基于场景和基于感知方法的通用流程;
2)本文总结并且讨论了未来的研究方向,为推进AV技术的发展做出了贡献。
论文图片和表格

总结
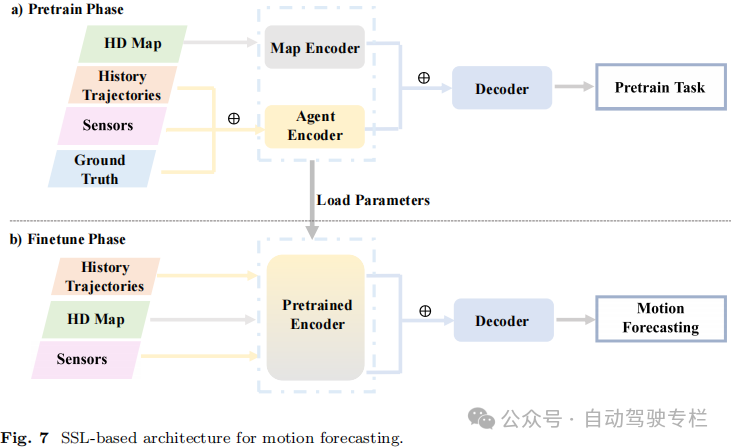
本文全面概述了自动驾驶汽车运动预测的最新进展。本文首先介绍了运动预测的表述,然后回顾了各种广泛使用的数据集。接着,详细解释了专门为运动预测设计的评估指标。最先进的预测模型已经取得了重大进展,它们采用了注意力机制、GNNs、transformers和自监督架构等先进技术。尽管这些技术取得了突破,但是该领域仍然面临着重大挑战。理解运动预测对于自动驾驶至关重要,因为它极大地提高了道路场景的可解释性,从而在提高未来自动驾驶技术的安全标准方面发挥着重要作用。