













0.1 什么是端到端?
首先定义端到端,当然有很多说法。我觉得,起码说相对于分阶段而言,规划不只是根据感知和预测的结果,而是其隐特征。进一步说,在前传和反传,planning可以直接触及输入信息。
0.2 为什么做端到端?
① 优势一:应对场景更多样;
② 优势二:上游出错的结果,不一定影响下游的planning;比如,如果看tesla的有些视频,就是这样,明显感知出错了,不影响planning;
③ 优势三,性能天花板够高,模型设计空间大:比如可以和大模型结合;比如,可以和无监督训练结合。因为,无监督,说明特征无倾向;数据量够大,说明特征泛化好。那分阶段的,一般是有监督训练,当然也可以无监督做个backbone,但还是需要有监督再调;
1、端到端技术路线划分及代表工作
① 直接端到端:就是说,不需要中间感知预测模块,比如mile、driveworld、dreamer-v1、dreamer-v2、sem2、bevplanner、transfuser、driveTransformer;可能需要监督,也可能不需要监督,但是,都没有中间模块了;
② 模块化端到端:以UniAD为代表,FusionAD,VAD,GenAD,都是;
③ 大语言模型路线:drive like a human, driveGPT4, LMDrive, EMMA,Senna;我认为是,这条路线在NLP和多模态的成功,具有启发意义;
④ 基于world model的路线:world models,dreamer-V1\V2, sem2,mile,driveworld, 这些的状态转移,其实就是world model。但是现在所说的world model,比如gaia-1, drivewm, 其实可以和端到端模型结合,比如drivewm做了一个比较粗糙的结合。我认为是趋势,是未来。
⑤ 基于Diffusion的路线:以DiffusionDrive为例;
按照学习范式,又可分为模仿学习和强化学习,这两个并不冲突,可以一起用。
以上,仅为梳理方便而人为划分,仅供参考。角度不同,划分也不同。我认为,每个研究领域都有其自己的生命力,不可硬性分为几个set的。
2、路线分析
2.1 直接端到端和模块化端到端的对比
直接端到端,由传感器信息直接映射到action或者轨迹。由于action或轨迹都太稀疏,训练较为困难,因此,这条路线一般辅以感知的监督训练,如bevseg、occ、车道线、红绿灯等。比如mile、driveworld、dreamer-v1、dreamer-v2、sem2、bevplanner、transfuser、driveTransformer.
")
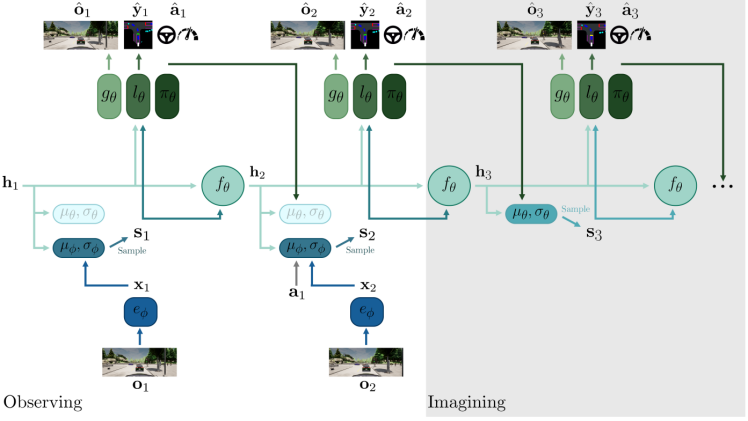
直接端到端(以mile举例)
模块化端到端,传感器信息,经过若干感知模块,映射为action或轨迹。不同模块间可传梯度,共同训练。其类似于传统的分阶段自动驾驶,不过是把不同阶段通过transformer中的query机制连接. 以UniAD为代表,FusionAD,VAD,GenAD,都是;
")
模块化端到端(以UniAD举例)")
BevPlanner里面的对比图(上面是模块化端到端,下面是直接端到端)
对比可知,由于现有直接端到端也会辅以感知的监督,直接端到端和模块化端到端的共同点是都需要感知监督。不同的是,直接端到端是并联形式,也就是基于共同的表征feature map,来学习感知和规划;模块化端到端的主线是串联形式,还是依赖于感知结果的。
因此,我认为是直接端到端的天花板更高,而模块化端到端更好训练一些。因为模块化端到端的中间模块,就是通过对应的感知,释加显示的约束,减小求解空间,那这带来的好处就是好训练,不好就是可能把更有效的规划结果给约束掉了。虽然直接端到端也辅以感知,但毕竟是隐式的,也就是感知是为了学习feature map, 规划还是直接基于feature map的。

ICLR2025在投论文 DriveTransformer,感知、预测、规划并联输出
我认为这两条路线,没有本质区别,只是技术发展的一个顺序:模块化更好训,但最终收敛到直接端到端。但达到更好效果,还有不少工作要做。
2.2 基于VLM或LLM的端到端方案
比如drive like a human, driveGPT4, LMDrive, EMMA,Senna。
首先,我觉得VLM或LLM是有用的。
因为LLM或VLM,复杂场景理解、推理能力,这是很强的。另外一方面,在自动驾驶里,对于轨迹解释、VQA等,可能只能用VLM这样的技术来做。
但是,具体怎么用?是直接替代模块化端到端,还是和他们结合?我认为是后者。
VLM擅长场景理解和推理。所以在复杂场景,模块化端到端可能就傻眼了;VLM呢,泛化能力强,还能有个基本的场景理解。所以这些场景,VLM出决策建议,或者粗轨迹给模块化的端到端,或者直接给下游,应该是很有用的。
(1)双流架构的模型:
也就是一个运行快的模型,和一个运行慢的模型,并行运行;至于二者怎么分工和交互,每个工作各有所长,这个细节可以在讨论。相关工作,比如 DriveVLM、LeapAD、AsyncDriver。On the road虽然没做,但在future work中提到了感知部分需要融合传统方案和VLM方案的双流构思。Senna是做端到端规划,其逻辑和思想,与On the road一致。On the road和Senna都认为,VLM适合粗粒度的场景理解和推理,应结合具体任务的模型,实现专家模型泛化能力的增强。我个人非常赞同这个观点。

2024.03, DRIVEVLM: The Convergence of Autonomous Driving and Large Vision-Language Models")
2024.05, Continuously Learning, Adapting, and Improving: A Dual-Process Approach to Autonomous Driving (LeapAD)
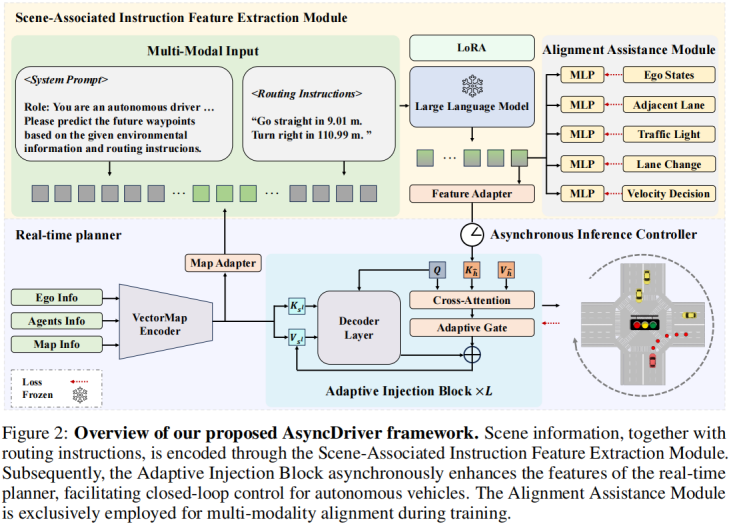
2024.06, Asynchronous Large Language Model Enhanced Planner for Autonomous Driving,和DriveVLM不同的是:这里的两个系统是做自适应融合,而DriveVLM是做switch.
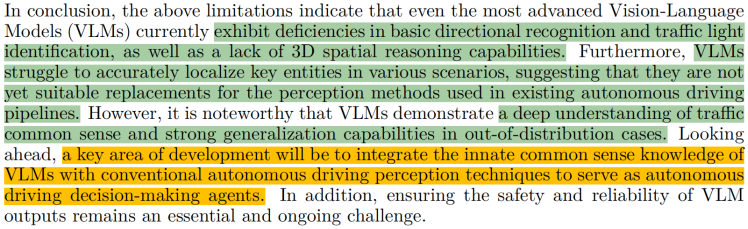
2023.11, On the Road with GPT-4V(ision): Explorations of Utilizing Visual-Language Model as Autonomous Driving Agent的conclusion部分, 总结的特别好:VLM适合粗粒度的场景理解和推理,可和具体任务模型(专家模型)结合,发挥二者优势。


2024.10,Senna: Bridging Large Vision-Language Models and End-to-End Autonomous Driving
(2)3D信息:
有几篇工作,支撑需要3D信息的观点。至于这个3D,是显式的监督信息带来的,还是2D自监督带来的(如dinov2),是可以讨论的。比如"Is a 3D-Tokenized LLM the Key to Reliable Autonomous Driving? "、”Language-Image Models with 3D Understanding(Cube-LLM)“、”On the Road with GPT-4V(ision): Explorations of Utilizing Visual-Language Model as Autonomous Driving Agent“。前两篇,是正向支撑,证明了加了3D比较好;第三篇是反向支撑,证明没有3D的定位和空间推理能力弱。
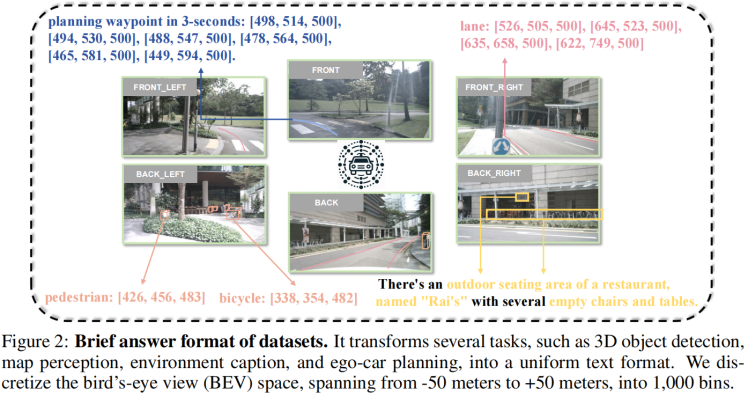

2024.05, "Is a 3D-Tokenized LLM the Key to Reliable Autonomous Driving?")
2024.05, Language-Image Models with 3D Understanding(Cube-LLM)
(3)总结:
总的来说,这条路线的发展趋势可能是:①和非大语言模型的方案形成双流架构;② 补充3D信息。
此外,On the Road with GPT-4V 和 Image Textualization这两篇论文都提到,现在VLM对环境的感知,属于粒度比较粗的场景理解。
当然,如 Image Textualization这样的方法,正在弥补VLM在细粒度问题上的不足。这条路线值得一直关注。
2.3 基于world model的端到端路线
World Model分为两类:端到端自动驾驶模型中的world model,数据生成中的world model。
world model的定义:

2018, World Models
World Model要具备三个属性:预测、表征、可控。
(1)端到端自动驾驶模型中的world model
用于开车:探讨世界模型的集成如何使自动驾驶汽车能够预测并制定行动策略?
比如早期的world models,dreamr-V1, dream-V2, sem2, Fiery,mile, 近期的DriveWorld,以Mile为代表:
https://wayve.ai/thinking/learning-a-world-model-and-a-driving-policy/
但是这条路线,好像是用到机器人的偏多,,,用到智驾有一个明显问题:累计误差。
目前,智驾领域的World Model,一般指基于action条件的驾驶场景数据生成。
(2)数据生成中的world model
用于数据生成和驾驶行为理解:corner case的数据生成,模型或人类驾驶行为的理解
以GAIA-1为代表:
https://wayve.ai/thinking/scaling-gaia-1/

2023.09,GAIA-1
(3)二者的统一:Foundation Model

2024.05, DriveWorld, 把Occ预测和action规划合二为一
Mile, 其实也是生成和规划合二为一的
将生成和规划合二为一的,基本都可以作为foundation model。这类工作有个共性,就是生成的对象是有语义信息和几何信息的。按道理,也只有这样才能做规划。比如,Driveworld是生成Occ; Mile是生成BevSeg图。
值得说明,Mile本身不是Foundation model,但其范式非常具备自动驾驶Foundation Model的潜力。Mile是一篇非常好的学术工作,指的不是性能好,而是启发性强。后期很多端到端的工作,都有Mile的影子。DriveWorld里的MSSM和Mile也类似。
(4)总结world model的用处:
第一个是:端到端出planning或action
第二个是:数据生成,可控数据生成,corner case数据生成;给训练感知或端到端自动驾驶模型用;
第三个是:真实场景的闭环仿真系统,采集数据、评估模型、驾驶行为理解;
第四个是:Foundation Model。也就是基于这个模型,做一系列下游任务。这种范式的工作并不多,代表性的是DriveWorld。个人猜测特斯拉是基于worldmodel,,,因为tesla这么大的算力,我想不是训练模块化端到端,也不是训练VLM,,只有world model匹配如此大算力。仅为个人猜测。
个人认为:虽然这两年是模块化端到端和VLM端到端热闹,过两年可能就是world model了;world model是非常具备潜力的方向,端到端可以看做是world model的子集。
2.4 基于Diffusion的端到端路线
这方面看的不多,以DiffusionDrive举例
Motivation:扩散模型已被证明是机器人领域一种强大的生成决策策略;而扩散本身是连续空间的问题,和轨迹规划更契合,但Diffusion用于规划,不能实时;
- 直接把Transfuser里的planning decoder换成diffusion,有两个问题:模式坍塌、时间太长;
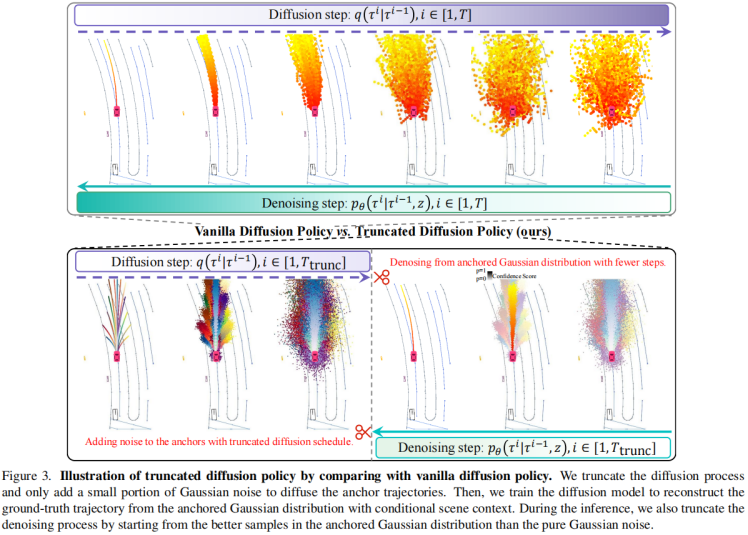
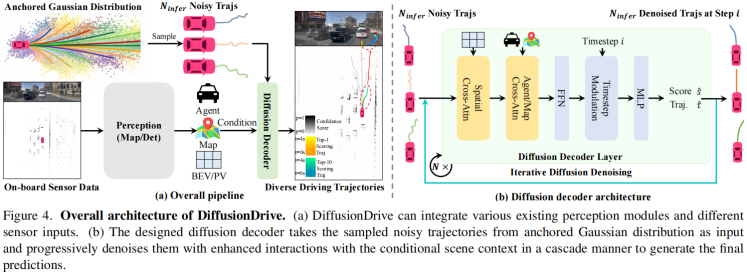
- 因此提出,Truncated Diffusion:
① 添加anchor的概念,基于anchor做扩散;
② 前向扩散,只添加小部分高斯噪声,不要到全部是高斯噪声;
③ 其他细节:前向diffusion steps=50,反向denoising steps=2。
个人认为有两个地方疑惑:
- 消融实验,无从验证diffusion真正起到的作用;
- 为什么要用diffusion做规划?没有论述。个人认为,轨迹规划,本身可以看出是分布的问题,用Diffusion合情合理;但总感觉,杀鸡用牛刀,diffusion更适合分布复杂的情况,如图像生成、语音生成,而对于轨迹规划,可能不能凸显出diffusion的优势。
补充:基于Diffusion的方法,和前面所说的直接端到端、模块化端到端,甚至基于world model的端到端,不冲突,是结合使用的。简单说,就是把一步回归改为多步回归。
3、总结

整体来说,这几条路线,统一大于对立。





























