













想象这样一个场景:你正在火锅店和朋友畅聊,一个机器人熟练地为你倒饮料、端菜,完全不需要你分心招呼服务员。这个听起来像科幻的场景,已经被清华大学交叉信息院的研究者们变成了现实!他们发现了具身智能领域的 “圣杯”——data scaling laws,让机器人实现了真正的零样本泛化,可以无需任何微调就能泛化到全新的场景和物体。这一突破性发现,很可能成为机器人领域的 “ChatGPT 时刻”,彻底改变我们开发通用机器人的方式!

从火锅店到电梯,机器人展现惊人泛化力
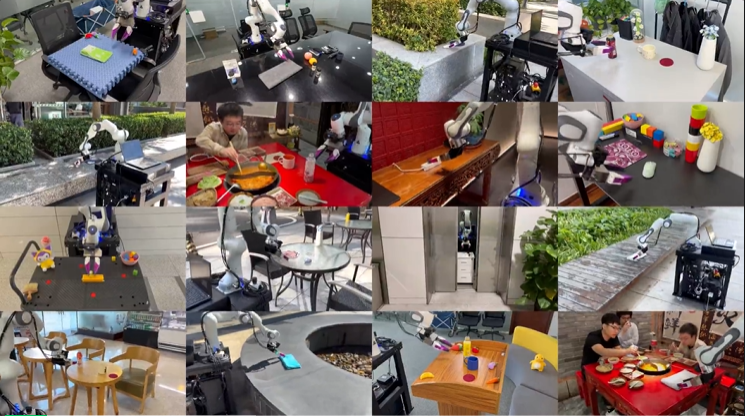
研究团队可不是只在实验室里玩玩具。他们把机器人带到了各种真实场景:火锅店、咖啡厅、公园、喷泉旁,甚至是电梯里。更令人震惊的是,机器人在这些前所未见的环境中都展现出了超强的适应能力!
为了确保研究的可复现性,团队慷慨地开源了所有资源,包括耗时半年收集的海量人类演示数据:

- 论文标题:Data Scaling Laws in Imitation Learning for Robotic Manipulation
- 论文链接:https://arxiv.org/abs/2410.18647
- 项目主页:https://data-scaling-laws.github.io/
连 Google DeepMind 的机器人专家 Ted Xiao 都忍不住为这项研究点赞,称其对机器人大模型时代具有里程碑意义!

Scaling Laws:从 ChatGPT 到机器人的制胜法则
还记得 ChatGPT 为什么能横空出世吗?答案就是 scaling laws!现在,清华团队首次证明:这个法则在机器人领域同样适用。事实上,真正的 scaling laws 包含数据、模型和算力三个维度,而本研究重点突破了最基础也最关键的数据维度。
研究团队使用便携式手持夹爪 UMI,在真实环境中收集了超过 4 万条人类演示数据。他们采用最新的 Diffusion Policy 方法从这些数据中学习机器人控制模型,并通过惊人的 15000 + 次实机测试进行严谨评估,最终发现了三个革命性的幂律关系:
- 模型对新物体的泛化能力与训练「物体」数量呈幂律关系。
- 模型对新环境的泛化能力与训练「环境」数量呈幂律关系。
- 模型对环境 - 物体组合的泛化能力与训练「环境 - 物体对」的数量呈幂律关系。

这意味着什么?简单说:只要有足够的数据,机器人就能像 ChatGPT 理解语言一样,自然地理解和适应物理世界!这一发现不仅证实了机器人领域与语言模型存在惊人的相似性,更为预测数据规模与模型性能的关系提供了坚实的理论基础。
颠覆性发现:数据收集原来要这么做!
研究团队还破解了一个困扰业界的难题:对于给定的操作任务,如何优化选择环境数量、物体数量和每个物体的演示次数?
经过大量实验,他们得出了两个出人意料的结论:
1. 当环境数量足够多时,在单一环境中收集多个不同的操作物体的数据收益极其有限 —— 换句话说,每个环境只需要一个操作物体的数据就够了。

2. 单个物体的演示数据很容易达到饱和 —— 在倒水和摆放鼠标等任务中,总演示数据达到 800 次时,性能就开始趋于稳定。因此,每个物体 50 次示范基本就能搞定。

为验证这个策略,团队找来 4 个人,只花了一个下午就收集到了训练数据。结果令人震惊:在 8 个全新场景中,机器人成功率高达 90%!这意味着,原本可能需要几个月的数据收集工作,现在可能只需要几天就能完成!

模型规模化探索的意外发现
除了数据规模,研究团队还在模型规模化方面有三个重要发现:
- 视觉编码器必须经过预训练和完整的微调,缺一不可
- 扩大视觉编码器的规模能显著提升性能
- 最令人意外的是:扩大扩散模型的规模却没能带来明显的性能提升,这一现象还值得深入研究

未来展望
数据规模化正在推动机器人技术走向新纪元。但研究团队提醒:比起盲目增加数据量,提升数据质量可能更为重要。关键问题在于:
- 如何确定真正需要扩展的数据类型?
- 如何最高效地获取这些高质量数据?
这些都是 Data Scaling Laws 研究正在积极探索的方向。相信在不久的将来,具有超强适应力的机器人将走进千家万户,让科幻电影中的场景变为现实!而这一切,都将从清华团队发现的这个基础性规律开始!
关于作者
该项目有两位共同一作。一位是清华大学交叉信息研究院四年级博士生胡英东,专注于具身智能领域的前沿研究。他致力于探索通用机器人系统所面临的基础性问题,旨在使机器人能够在各种非结构化的现实环境中泛化其学习到的行为。

另一位是交叉信息研究院一年级博士生林凡淇。他专注于将大模型的先验知识融合到机器人任务中,帮助机器人完成日常生活中的复杂任务;同时他希望利用已有的机器人算法、视觉语言大模型,探索机器人落地的可能性。

项目的通讯作者是清华大学交叉信息研究院的助理教授高阳,他主要研究计算机视觉与机器人学。此前,他在美国加州大学伯克利分校获得博士学位,师从 Trevor Darrell 教授。他还在加州伯克利大学与 Pieter Abbeel 等人合作完成了博士后工作。在此之前,高阳从清华大学计算机系毕业,与朱军教授在贝叶斯推理方面开展了研究工作。他在 2011-2012 年在谷歌研究院进行了自然语言处理相关的研究工作、2016 年在谷歌自动驾驶部门 Waymo 的相机感知团队工作,在 2018 年与 Vladlen Koltun 博士在英特尔研究院在端到端自动驾驶方面进行了研究工作。高阳在人工智能顶级会议 NeurIPS,ICML,CVPR,ECCV,ICLR 等发表过多篇学术论文,谷歌学术引用量超过 2000 次。


























