版本:Elasticsearch 8.x
今天来看下 Elasticsearch 中的写入流程。
不想看过程可以直接跳转文章末尾查看总结部分。最后附上个人理解的一个图。
从我们发出写入请求,到 Elasticsearch 接收请求,处理请求,保存数据到磁盘,这个过程中经历了哪些处理呢?Elasticsearch 又做了哪些操作?对于 Elasticsearch 写入一篇文档相信大家不陌生,但是Elasticsearch 的底层究竟是如何处理的呢,让我们一起来一探究竟。
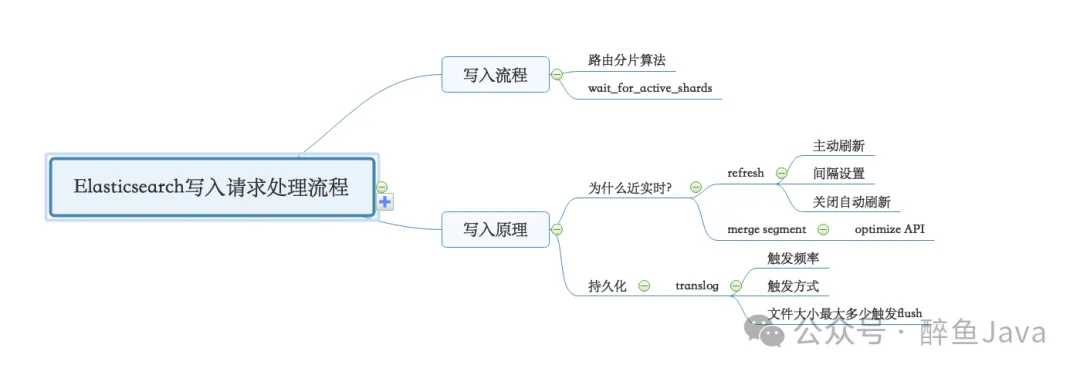
写入流程
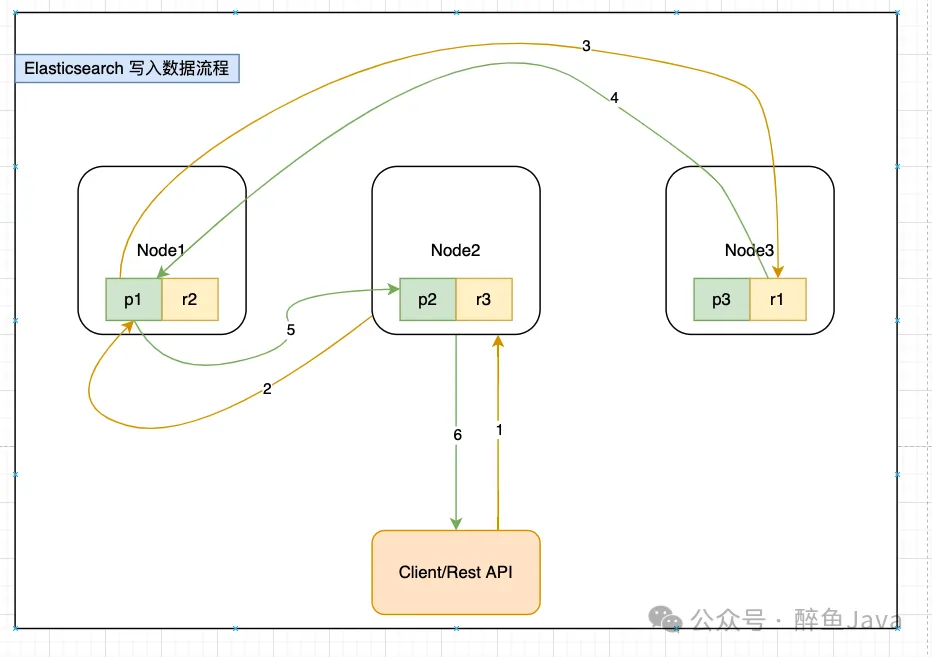
(1) 客户端发送写请求时,发送给任意一个节点,这个节点就是所谓的协调节点(coordinating node)。(对应图中的序号1)
(2) 计算文档要写入的分片位置,使用 Hash 取模算法(最新版 Hash 算法)(对应图中序号2)。
routing_factor = num_routing_shards / num_primary_shards
shard_num = (hash(_routing) % num_routing_shards) / routing_factor(3) 协调节点进行路由,将请求转发给对应的 primary sharding 所在的 datanode(对应图中序号2)。
(4) datanode 节点上的 primary sharding 处理请求,写入数据到索引库,并且将数据同步到对应的 replica sharding(对应图中序号3)。
(5) 等 primary sharding 和 replica sharding 都保存好之后返回响应(对应图中序号 4,5,6)。
路由分片算法
在7.13版本之前,计算方式如下:
shard_num = hash(_routing) % num_primary_shards从7.13 版本开始,不包括 7.13 ,计算方式就改为了上述步骤2的计算方式。
routing_factor = num_routing_shards / num_primary_shards
shard_num = (hash(_routing) % num_routing_shards) / routing_factor- num_routing_shards 就是配置文件中 index.number_of_routing_shard 的值。
- num_primary_shard 就是配置文件中 index.number_of_shard 的值。
- _routing 默认就是文档的 ID,但是我们可以自定义该路由值。
等待激活的分片
此处以 Create index API 举例说明,其中有一个请求参数 wait_for_active_shards。 该参数的作用就是写入请求发送到ES之后,需要等待多少数量的分片处于激活状态后再继续执行后续操作。如果所需要数量的分片副本不足,则写入操作需等待并重试,直到所有的分片副本都已经启动或者发生超时。
默认情况下,写入操作仅等待主分片处于活动状态后继续执行(即 wait_for_active_shard=1)。
- (可选)的字符串值。
- 默认1。
- 可以设置为all,或者任意一个正整数,最多是索引的副本分片数+1(number_of_replicas+1)。
该设置极大的降低了写操作未写入所需数量分片副本的机会,但是并没有完全避免。
写入原理
先来一个官网的写入流程图(地址在文末获取)。
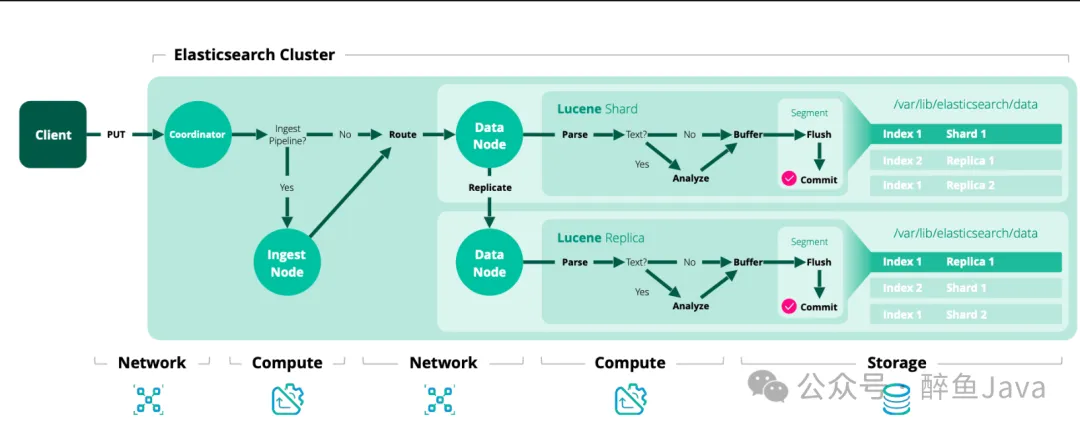
Elasticsearh 写入流程图
近实时
对于 Elasticsearch 的写入流程来说,就三部分:
- 写入到内存缓冲区。
- 写入打开新的 segment。
- 写入 disk。
为什么称为近实时,是因为在写入到内存缓冲区的时候,我们是还无法进行检索的,等到写入到segment之后,就可以进行检索到了,所以这是近实时的原因。
因为相对于写到磁盘,打开 segment 写入文件系统缓存的代价比写入磁盘的代价低的多。
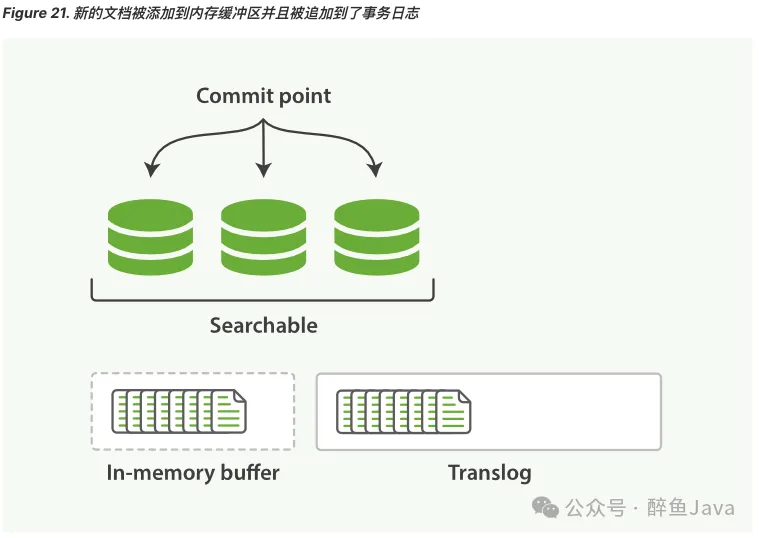
第一步、写入文档到内存缓冲区(此时文档不可被检索)。
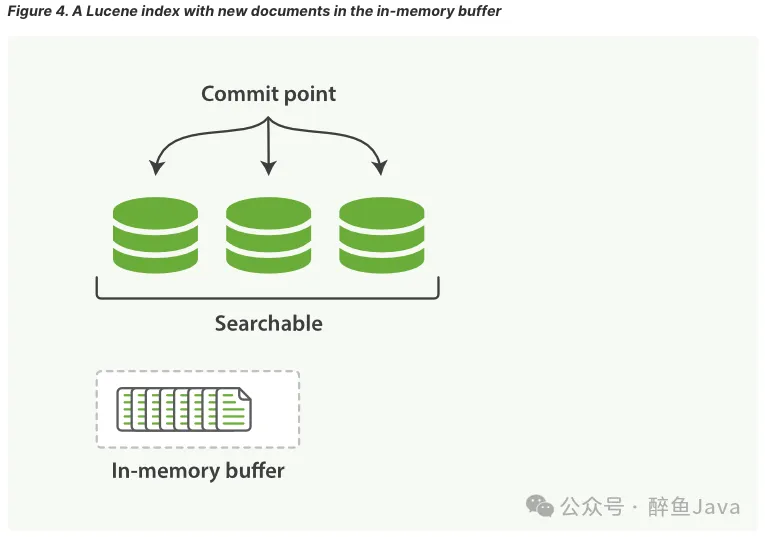
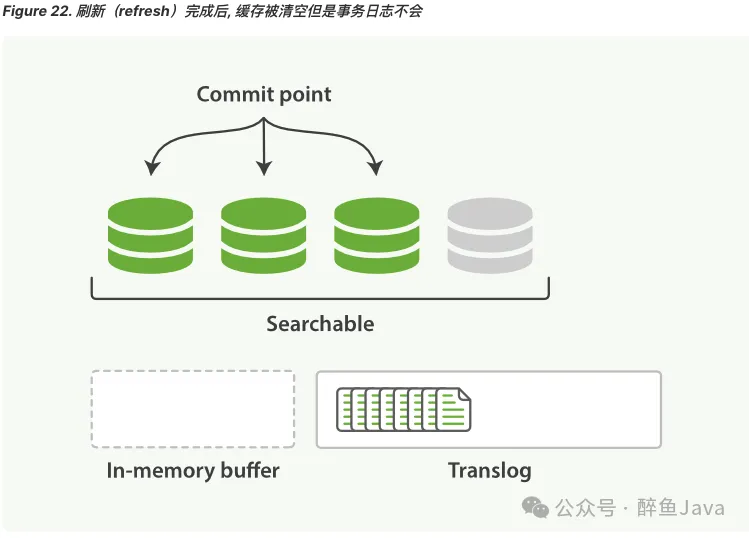
第二步、缓冲区的内容写入到 segment,但是还未提交(可被检索)。
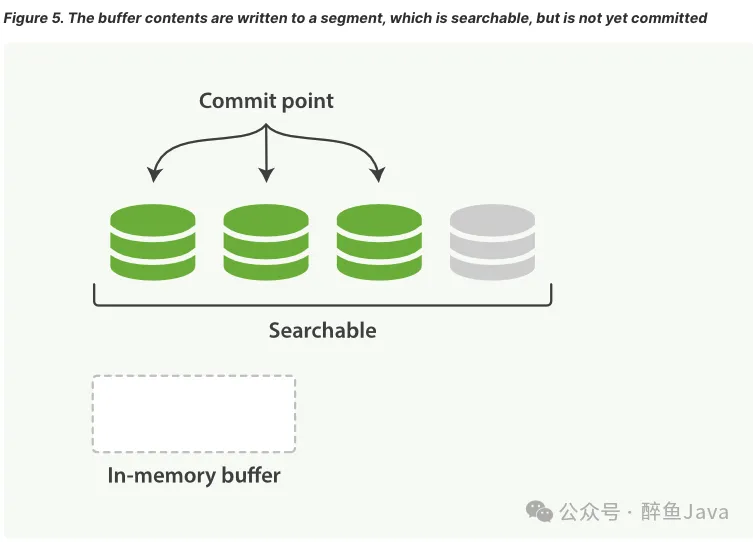
在 Elasticsearch 中,写入和打开一个新segment的过程称为 refresh,refresh操作会自上次刷新(refresh)以来执行的所有操作都可用搜索。
refresh触发的方式有如下三种:
- 刷新间隔到了自动刷新。
- URL增加?refresh参数,需要传空或者true。
- 调用Refresh API手动刷新
默认情况下,Elasticsearch 每秒定期刷新,但是仅限于在过去的30s内收到的一个或者多个 search请求。这个也就是近实时的一个点,文档的更改不会立即显示在下一次的检索中,需要等待 refresh 操作完成之后才可以检索出来。
我们可以通过如下方式触发refresh操作或者调整自动刷新的间隔。
POST /_refresh
POST /blogs/_refresh调整刷新间隔,每 30s 刷新:
PUT /my_logs
{
"settings": {
"refresh_interval": "30s"
}
}关闭自动刷新:
PUT /my_logs/_settings
{ "refresh_interval": -1 } 设置为每秒自动刷新:
PUT /my_logs/_settings
{ "refresh_interval": "1s" refresh_interval 需要一个 持续时间 值, 例如 1s (1 秒) 或 2m (2 分钟)。 一个绝对值 1 表示的是 1毫秒 --无疑会使你的集群陷入瘫痪。
段(segment)合并
由于 refresh 操作会每秒自动刷新生成一个新的段(segment),这样的话短时间内,segment会暴增,segment数量太多,每一个都会造成文件句柄、内存、CPU的大量消耗,还有一个更重要的点就是,每个检索请求也会轮流检查每一个segment,所以segment越多,检索也就越慢。
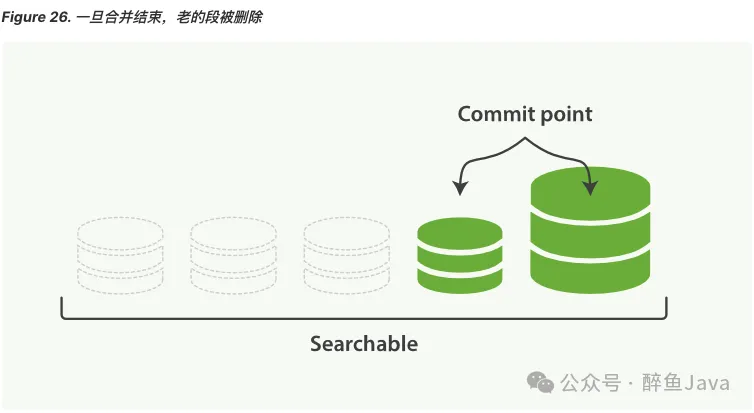
Elasticsearch 通过在后台自动合并 segment 来解决这个问题的。小的segment被合并到大的segment,然后大的segment在被合并到更大的segment。
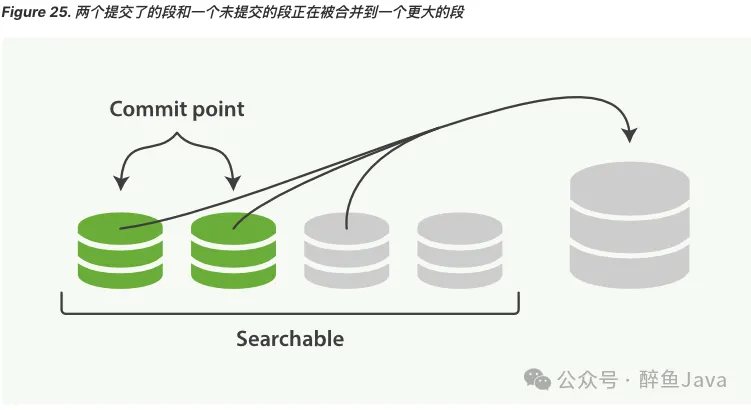
segment 合并的时候会自动将已删除的文档从文件系统中删除,已经删除的文档或者更新文档的旧版本不会被合并到新的 segment中。
- 当 index 的时候,refresh操作会创建新的segment,并将segment打开以供检索。
- 合并进行会选择一小部分大小相似的segment,在后台将他们合并到更大的segment中,这个操作不会中断 index 与 search 操作。
optimize API
optimize API 不应该用在经常更新的索引上。
该 optimize API 可以控制分片最大的 segment数量,对于有的索引,例如日志,每天、每周、每月的日志被单独存在一个索引上,老得索引一般都是只读的,也不太可能发生变化,所以我们就可以使用这个 optimize API 优化老的索引,将每个分片合并为一个单独的segment。这样既可以节省资源,也可以加快检索速度。
合并索引中的每个分片为一个单独的段:
POST /logstash-2014-10/_optimize?max_num_segments=1 持久化
上述的refresh操作是 Elasticsearch 近实时 的原因,那么数据的持久化就要看fsync操作把数据从文件系统缓冲区flush到磁盘了。所以只有当translog被fsync操作或者是提交时,translog中的数据才会持久化到磁盘。
如果没有持久化操作,当 Elasticsearch 宕机发生故障的时候,就会发生数据丢失了,所以 Elasticsearch 依赖于translog进行数据恢复。
在 Elasticsearch 进行提交操作的时候,成本是非常高的,所以策略就是在写入到内存缓冲区的时候,同步写入一份数据到translog,所有的index与delete操作都会在内部的lucene索引处理后且未确认提交之前写入teanslog。
如果发生了异常,当分片数据恢复时,已经确认提交但是并没有被上次lucene提交操作包含在内的最近操作就可以在translog中进行恢复。
Elasticsearch 的 flush操作是执行 Lucene提交并开始生成新的translog的过程,为了确保translog文件不能过大,flush操作在后台自动执行,否则在恢复的时候也会因为文件过大花费大量的时间。
对于translog有如下设置选项:
- index.translog.durability 默认设置为request ,意思就是只有当主分片和副本分片fsync且提交translog之后,才会向客户端响应index,delete,update,bulk请求成功。
- index.translog.durability 设置为async,则 Elasticsearch 会在每个index.translog.sync_interval 提交 translog,如果遇到节点恢复,则在这个区间执行的操作就可能丢失。
对于上述的几个参数,都可以动态更新:
(1) index.translog.sync_interval:将 translog fsync到磁盘并提交的频率。默认5s,不允许小于100ms。
(2) index.translog.durability:是否在每次index,delete,update,bulk操作之后提交translog。
- request: 默认,fsync 每次请求之后提交,如果发生故障,所有已确认的写入操作到已经提交到磁盘
- async: fsync在后台每个sync_interval时间间隔提交。如果发生故障,自上次提交以来所有已确认的写入操作将被丢弃。
(3) index.translog.flush_threshold_size:防止 translog 文件过大的设置,一旦达到设置的该值,就会发生 flush 操作,并生成一个新的 commit point。默认512mb。
总结
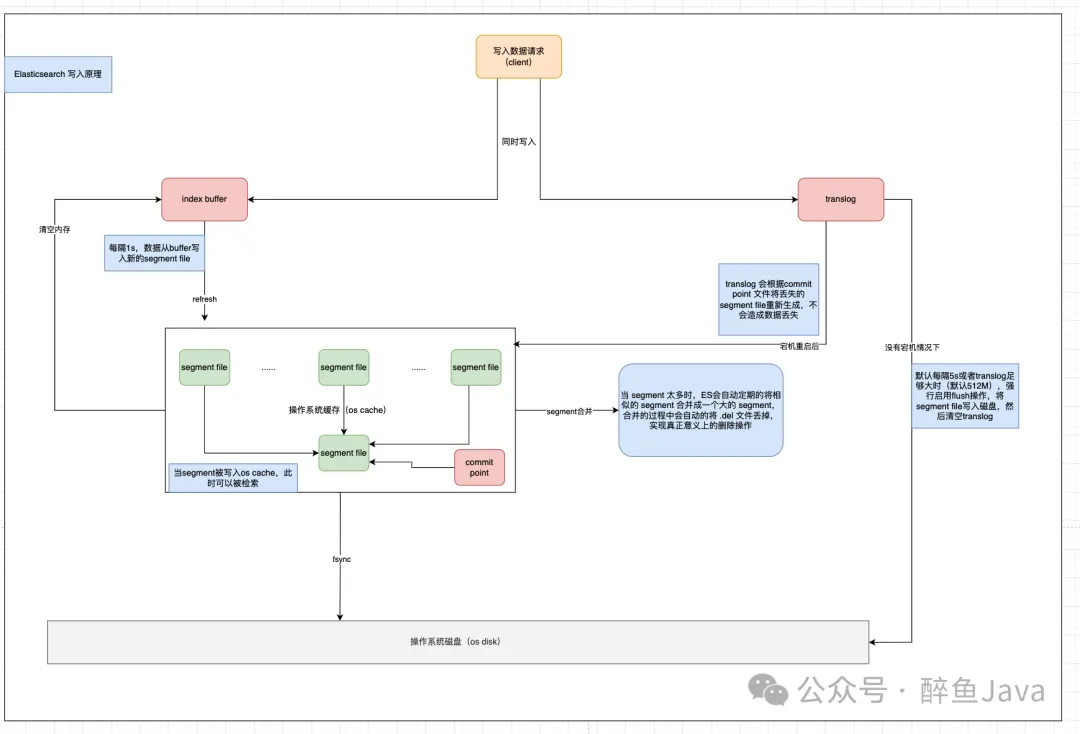
(1) 一个文档被index之后,添加内存缓存区,同时写入 translog。
(2) refresh 操作完成后,缓存被清空,但是 translog 不会
- 内存缓冲区的文档被写入到一个新的segment中,且没有进行fsync操作。
- segment 打开,可供检索。
- 内存缓冲区清空。
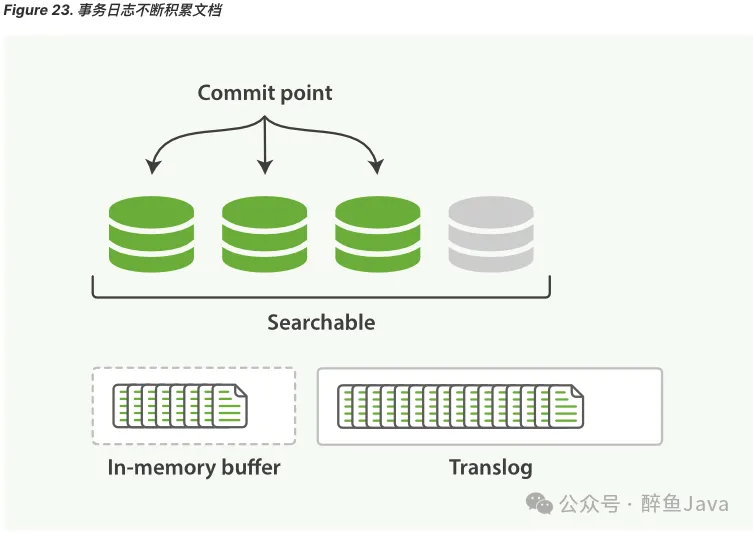
(3) 更多的文档被添加到内存缓冲区并追加到 translog。
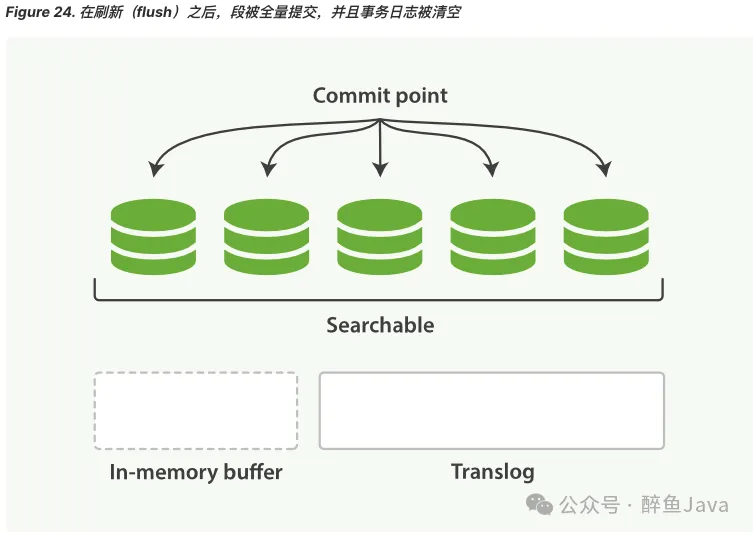
(4) 每隔一段时间,translog 变得越来越大,索引被刷新(flush),一个新的 translog 被创建,并且一个提交执行。
- 所有内存缓冲区的文档都被写入到一个新的段。
- 缓冲区被清空。
- 一个提交点写入磁盘。
- 文件系统缓存通过fsync被刷新(flush)。
- 老的 translog 被删除。
translog 提供所有还没有被刷到磁盘的操作的一个持久化记录。当 Elasticsearch 启动的时候,它会从磁盘中使用的最后一个提交点(commit point)去恢复已知的 segment ,并且会重放 translog 中所有在最后一次提交后发生的变更操作。
translog 也被用来提供实时的CRUD,当我们通过ID进行查询、更新、删除一个文档、它会尝试在相应的 segment 中检索之前,首先检查 translog 中任何最近的变更操作。也就是说这个是可以实时获取到文档的最新版本。
最后送上一个我自己理解的图,参考了官网的描述,以及网上画的,如有错误欢迎指出。