













本文经自动驾驶之心公众号授权转载,转载请联系出处。
写在前面&个人理解
最近这几年以视觉为中心的3D感知在自动驾驶中得到了快速发展。尽管3D感知模型在结构和概念上有许多相似之处,但在特征表示、数据格式和目标方面仍存在差距,这对统一高效的3D感知框架设计提出了挑战。
特别是BEV下的检测任务和Occupancy任务,想做好联合训练,还是很难的,不稳定和效果不可控让很多应用头大。UniVision是一个简单高效的框架,它统一了以视觉为中心的3D感知中的两个主要任务,即占用预测和目标检测。核心点是一个用于互补2D-3D feature transformation的显式-隐式视图变换模块,UniVision提出了一个局部全局特征提取和融合模块,用于高效和自适应的体素和BEV特征提取、增强和交互。
在数据增强部分,UniVision还提出了一种联合占用检测数据增强策略和渐进式loss weight调整策略,以提高多任务框架训练的效率和稳定性。在四个公共基准上对不同的感知任务进行了广泛的实验,包括无场景激光雷达分割、无场景检测、OpenOccupancy和Occ3D。UniVision在每个基准上分别以+1.5 mIoU、+1.8 NDS、+1.5 mIoU和+1.8 mIoU的增益实现了SOTA。UniVision框架可以作为统一的以视觉为中心的3D感知任务的高性能基线。
如果对BEV和Occupancy任务不熟悉的同学,也欢迎大家进一步学习我们的BEV感知教程和Occupancy占用网络教程,了解更多技术细节!
当前3D感知领域的状态
3D感知是自动驾驶系统的首要任务,其目的是利用一系列传感器(如激光雷达、雷达和相机)获得的数据来全面了解驾驶场景,用于后续的规划和决策。过去,由于来自点云数据的精确3D信息,3D感知领域一直由基于激光雷达的模型主导。然而,基于激光雷达的系统成本高昂,容易受到恶劣天气的影响,而且部署起来不方便。相比之下,基于视觉的系统具有许多优点,如低成本、易于部署和良好的可扩展性。因此,以视觉为中心的三维感知引起了研究者的广泛关注。
最近,通过特征表示变换、时间融合和监督信号设计,基于视觉的3D检测得到了显著改进,不断缩小了与基于激光雷达的模型的差距。除此之外,近年来基于视觉的占用任务得到了快速发展。与使用3D box来表示一些目标不同,占用率可以更全面地描述驾驶场景的几何和语义,并且不太局限于目标的形状和类别。
尽管检测方法和占用方法在结构和概念上有很多相似之处,但同时处理这两项任务并探索它们之间的相互关系并没有得到很好的研究。占用模型和检测模型通常提取不同的特征表示。占用预测任务需要在不同的空间位置上进行详尽的语义和几何判断,因此体素表示被广泛用于保存细粒度的3D信息。在检测任务中,BEV表示是优选的,因为大多数对象处于相同的水平水平面上,具有较小的重叠。
与BEV表示相比,体素表示是精细的,但效率较低。此外,许多高级算子主要针对2D特征进行设计和优化,使其与3D体素表示的集成不那么简单。BEV表示更具时间效率和内存效率,但对于密集空间预测来说,它是次优的,因为它在高度维度上丢失了结构信息。除了特征表示,不同的感知任务在数据格式和目标方面也有所不同。因此,确保训练多任务3D感知框架的统一性和效率是一个巨大的挑战。
UniVision网络结构

图1显示了UniVision框架的总体架构。给定来自周围N个相机的多视角图像作为输入,首先利用图像特征提取网络从中提取图像特征。然后,使用Ex-Im视图变换模块将2D图像特征提升为3D体素特征,该模块结合了深度引导的显式特征提升和查询引导的隐式特征采样。体素特征被发送到局部全局特征提取和融合block,以分别提取局部上下文感知体素特征和全局上下文感知BEV特征。然后使用交叉表示特征交互模块对用于不同下游感知任务的体素特征和BEV特征进行信息交换。在训练过程中,联合Occ-Det数据增强和渐进loss weight调整策略用于UniVision框架的有效训练。
1)Ex-Im View Transform
深度导向显式特征提升。这里遵循LSS方法:

2)查询引导的隐式特征采样。然而,在表示3D信息方面存在一些缺陷。的精度与估计的深度分布的精度高度相关。此外,LSS生成的点分布不均匀。点在相机附近密集,在距离上稀疏。因此,我们进一步使用查询引导的特征采样来补偿的上述缺点。

与从LSS生成的点相比,体素查询在3D空间中均匀分布,并且它们是从所有训练样本的统计特性中学习的,这与LSS中使用的深度先验信息无关。因此,和相互补充,将它们连接起来作为视图变换模块的输出特征:

2)局部全局特征提取与融合
给定输入体素特征,首先将特征叠加在Z轴上,并使用卷积层来减少通道,以获得BEV特征:

然后,模型分成两个平行的分支进行特征提取和增强。局部特征提取+全局特征提取,以及最后的交叉表示特征交互!如图1(b)中所示。
3)损失函数与检测头




渐进式loss weight调整策略。在实践中,发现直接结合上述损失往往会导致训练过程失败,网络无法收敛。在训练的早期阶段,体素特征Fvoxel是随机分布的,并且占用头和检测头中的监督比收敛中的其他损失贡献更小。同时,检测任务中的分类损失Lcls等损失项目非常大,并且在训练过程中占主导地位,使得模型难以优化。为了克服这一问题,提出了渐进式损失权重调整策略来动态调整损失权重。具体而言,将控制参数δ添加到非图像级损失(即占用损失和检测损失)中,以调整不同训练周期中的损失权重。控制权重δ在开始时被设置为较小的值Vmin,并在N个训练时期中逐渐增加到Vmax:

4)联合Occ-Det空间数据增强
在3D检测任务中,除了常见的图像级数据增强之外,空间级数据增强在提高模型性能方面也是有效的。然而,在占用任务中应用空间级别增强并不简单。当我们将数据扩充(如随机缩放和旋转)应用于离散占用标签时,很难确定生成的体素语义。因此,现有的方法只应用简单的空间扩充,如占用任务中的随机翻转。
为了解决这个问题,UniVision提出了一种联合Occ-Det空间数据增强,以允许在框架中同时增强3D检测任务和占用任务。由于3D box标签是连续值,并且可以直接计算增强的3D box进行训练,因此遵循BEVDet中的增强方法进行检测。尽管占用标签是离散的并且难以操作,但体素特征可以被视为连续的,并且可以通过采样和插值等操作来处理。因此建议对体素特征进行变换,而不是直接对占用标签进行操作以进行数据扩充。
具体来说,首先对空间数据增强进行采样,并计算相应的3D变换矩阵。对于占有标签及其voxel indices ,我们计算了它们的三维坐标。然后,将应用于,并对其进行归一化,以获得增强体素特征中的 voxel indices :
实验结果对比
使用了多个数据集进行验证,NuScenes LiDAR Segmentation、NuScenes 3D Object Detection、OpenOccupancy和Occ3D。
NuScenes LiDAR Segmentation:根据最近的OccFormer和TPVFormer,使用相机图像作为激光雷达分割任务的输入,并且激光雷达数据仅用于提供用于查询输出特征的3D位置。使用mIoU作为评估度量。
NuScenes 3D Object Detection:对于检测任务,使用nuScenes的官方度量,即nuScene检测分数(NDS),它是平均mAP和几个度量的加权和,包括平均平移误差(ATE)、平均尺度误差(ASE)、平均方向误差(AOE)、平均速度误差(AVE)和平均属性误差(AAE)。
OpenOccupancy:OpenOccupancy基准基于nuScenes数据集,提供512×512×40分辨率的语义占用标签。标记的类与激光雷达分割任务中的类相同,使用mIoU作为评估度量!
Occ3D:Occ3D基准基于nuScenes数据集,提供200×200×16分辨率的语义占用标签。Occ3D进一步提供了用于训练和评估的可见mask。标记的类与激光雷达分割任务中的类相同,使用mIoU作为评估度量!
1)Nuscenes激光雷达分割
表1显示了nuScenes LiDAR分割基准的结果。UniVision显著超过了最先进的基于视觉的方法OccFormer 1.5% mIoU,并在排行榜上创下了基于视觉的模型的新纪录。值得注意的是,UniVision还优于一些基于激光雷达的模型,如PolarNe和DB-UNet。

2)NuScenes 3D目标检测任务
如表2所示,当使用相同的训练设置进行公平比较时,UniVision显示出优于其他方法。与512×1408图像分辨率的BEVDepth相比,UniVision在mAP和NDS方面分别获得2.4%和1.1%的增益。当放大模型并将UniVision与时间输入相结合时,它进一步以显著的优势优于基于SOTA的时序检测器。UniVision通过较小的输入分辨率实现了这一点,并且它不使用CBGS。

3)OpenOccupancy结果对比
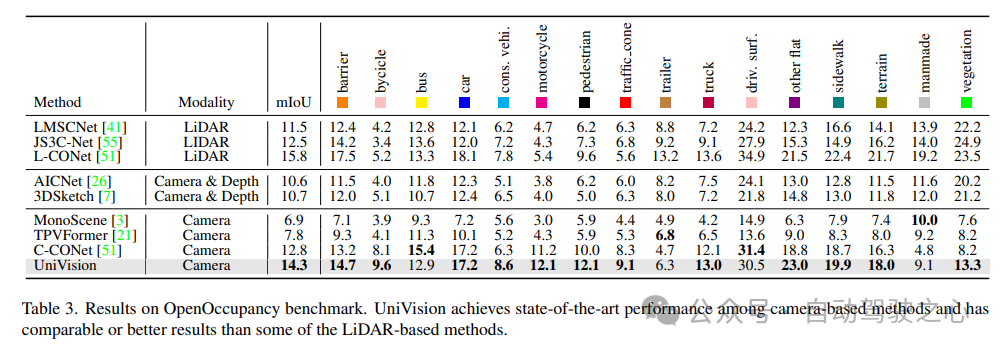
OpenOccupancy基准测试的结果如表3所示。UniVision在mIoU方面分别显著超过了最近的基于视觉的占用方法,包括MonoScene、TPVFormer和C-CONet,分别为7.3%、6.5%和1.5%。此外,UniVision超越了一些基于激光雷达的方法,如LMSCNet和JS3C-Net。
4)Occ3D实验结果
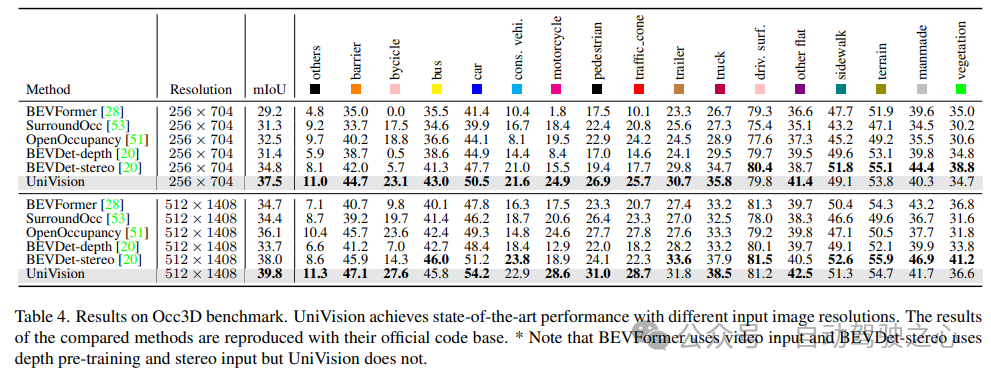
表4列出了Occ3D基准测试的结果。在不同的输入图像分辨率下,UniVision在mIoU方面显著优于最近的基于视觉的方法,分别超过2.7%和1.8%。值得注意的是,BEVFormer和BEVDet-stereo加载预先训练的权重,并在推理中使用时间输入,而UniVision没有使用它们,但仍然实现了更好的性能。
5)组件在检测任务中的有效性
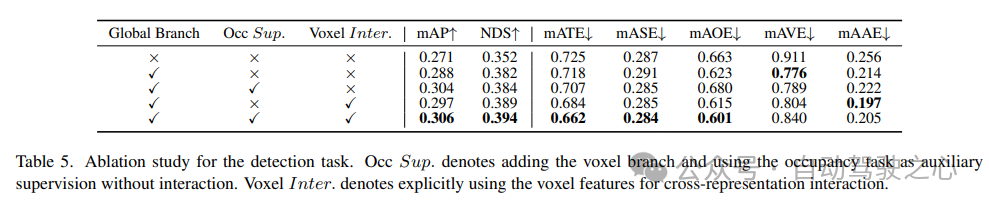
在表5中显示了检测任务的消融研究。当将基于BEV的全局特征提取分支插入基线模型时,性能提高了1.7%mAP和3.0%NDS。当将基于体素的占用任务作为辅助任务添加到检测器时,该模型的mAP增益提高了1.6%。当从体素特征中明确引入交叉表示交互时,该模型实现了最佳性能,与基线相比,mAP和NDS分别提高了3.5%和4.2%;
6)占用任务中组件的有效性
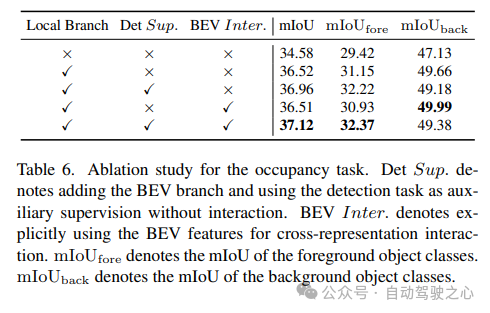
在表6中显示了占用任务的消融研究。基于体素的局部特征提取网络为基线模型带来了1.96%mIoU增益的改进。当检测任务被引入作为辅助监督信号时,模型性能提高了0.4%mIoU。
7)其它
表5和表6显示,在UniVision框架中,检测任务和占用任务都是相辅相成的。对于检测任务,占用监督可以提高mAP和mATE度量,这表明体素语义学习有效地提高了检测器对目标几何的感知,即中心度和尺度。对于占用任务,检测监督显著提高了前景类别(即检测类别)的性能,从而实现了整体改进。
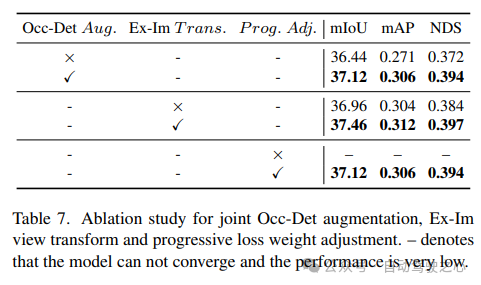
在表7中展示了联合Occ-Det空间增强、Ex-Im视图转换模块和渐进loss weight调整策略的有效性。通过所提出的空间增强和所提出的视图变换模块,它在mIoU、mAP和NDS度量上显示了检测任务和占用任务的显著改进。loss weight调整策略能够有效地训练多任务框架。如果没有这一点,统一框架的训练就无法收敛,性能也很低。

参考
论文链接:https://arxiv.org/pdf/2401.06994.pdf
论文名称:UniVision: A Unified Framework for Vision-Centric 3D Perception





























