













本文经自动驾驶之心公众号授权转载,转载请联系出处。
原标题:GraphAlign: Enhancing Accurate Feature Alignment by Graph matching for Multi-Modal 3D Object Detection
论文链接: https://arxiv.org/pdf/2310.08261.pdf
作者单位:北京交通大学 河北科技大学 清华大学

论文思路:
LiDAR 和camera是自动驾驶中 3D 目标检测的互补传感器。然而,探索点云和图像之间的非自然交互(unnatural interaction)具有挑战性,关键因素是如何进行异构模态的特征对齐。目前,许多方法仅通过投影校准来实现特征对齐,没有考虑传感器之间的坐标转换精度误差问题,导致性能次优。本文提出了 GraphAlign,这是一种通过图匹配(graph matching)进行 3D 目标检测的更准确的特征对齐策略。具体来说,本文融合图像分支中语义分割编码器的图像特征和 LiDAR 分支中 3D 稀疏 CNN 的点云特征。为了节省计算量,本文通过计算划分为点云特征的子空间内的欧氏距离来构造最近邻关系。通过图像和点云之间的投影校准,将点云特征的最近邻投影到图像特征上。然后,通过将单个点云的最近邻与多个图像进行匹配,本文搜索更合适的特征对齐。此外,本文提供了一个自注意力模块来增强重要关系的权重,以微调异构模态之间的特征对齐。 nuScenes 基准上的大量实验证明了本文的 GraphAlign 的有效性和效率。
主要贡献:
本文提出了 GraphAlign,一种基于图匹配(graph matching)的特征对齐框架,来解决多模态 3D 目标检测中的未对齐问题。
本文提出图特征对齐(Graph Feature Alignment)(GFA)和自注意力特征对齐(Self-Attention Feature Alignment)(SAFA)模块来实现图像特征和点云特征的精确对齐,这可以进一步增强点云和图像模态之间的特征对齐,从而提高检测精度。
使用 KITTI [12] 和 nuScenes [2] 基准进行实验,证明 GraphAlign 可以提高点云检测精度,特别是对于远距离目标检测。
网络设计:
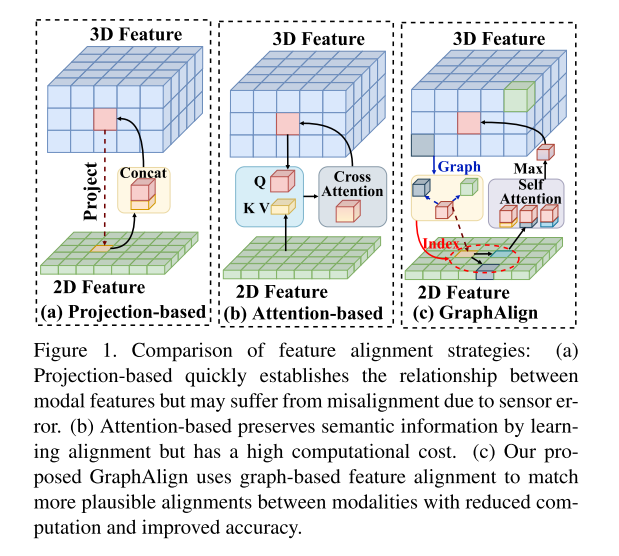
图 1. 特征对齐策略的比较
(a) 基于投影的方法可以快速建立模态特征之间的关系,但可能会因传感器误差而出现未对齐的情况。 (b) 基于注意力的方法通过学习对齐来保留语义信息,但计算成本较高。 (c) 本文提出的 GraphAlign 使用基于图的特征对齐来匹配模态之间更合理的对齐,从而减少计算量并提高准确性。
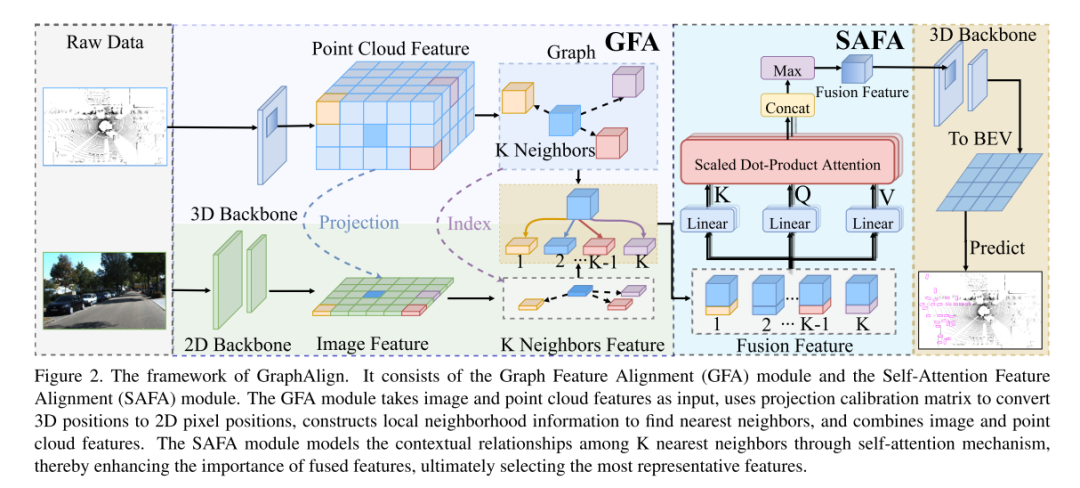
图 2. GraphAlign 的框架。
它由图特征对齐(GFA)模块和自注意力特征对齐(SAFA)模块组成。 GFA模块以图像和点云特征作为输入,使用投影校准矩阵将3D位置转换为2D像素位置,构造局部邻域信息以查找最近邻,并结合图像和点云特征。 SAFA模块通过自注意力机制对K近邻之间的上下文关系进行建模,从而增强融合特征的重要性,最终选择最具代表性的特征。
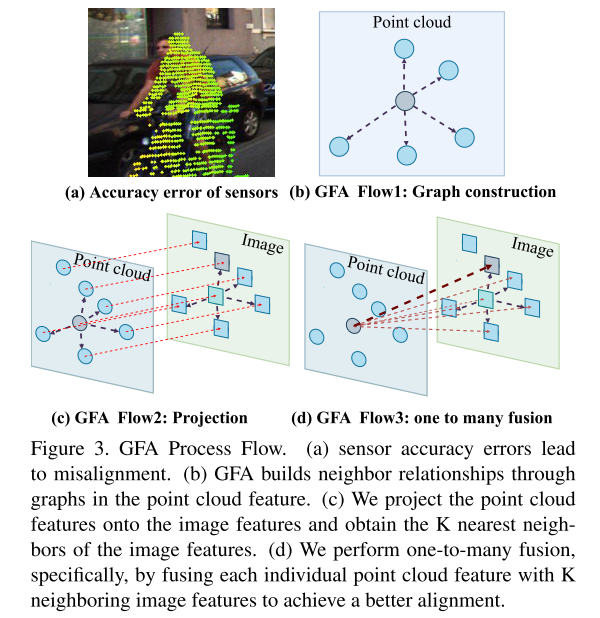
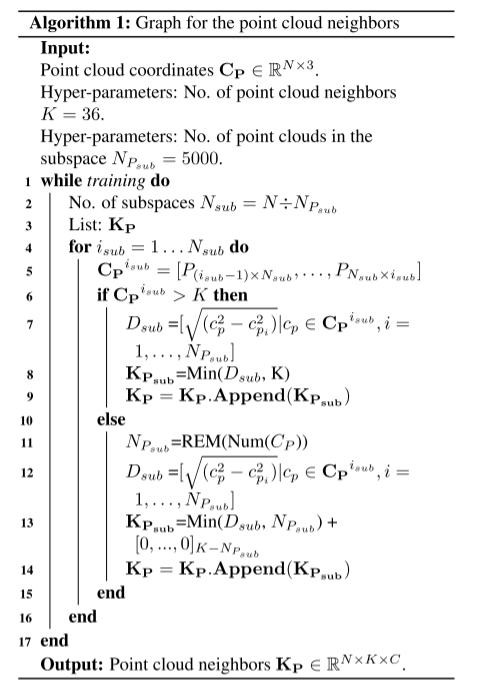
图 3. GFA 处理流程
(a) 传感器精度误差导致未对齐。 (b) GFA通过点云特征中的图建立邻近关系。 (c) 本文将点云特征投影到图像特征上,并获得图像特征的 K 个最近邻。 (d) 本文执行一对多融合,具体来说,通过将每个单独的点云特征与 K 个相邻图像特征融合来实现更好的对齐。
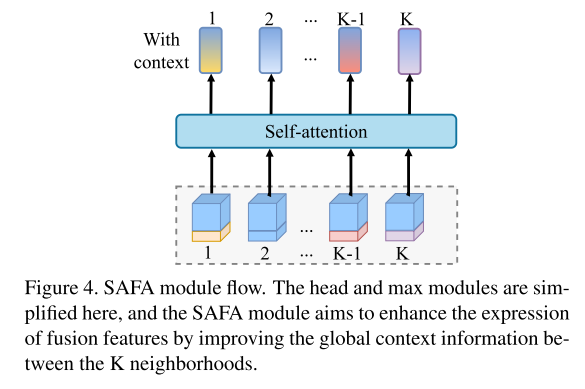
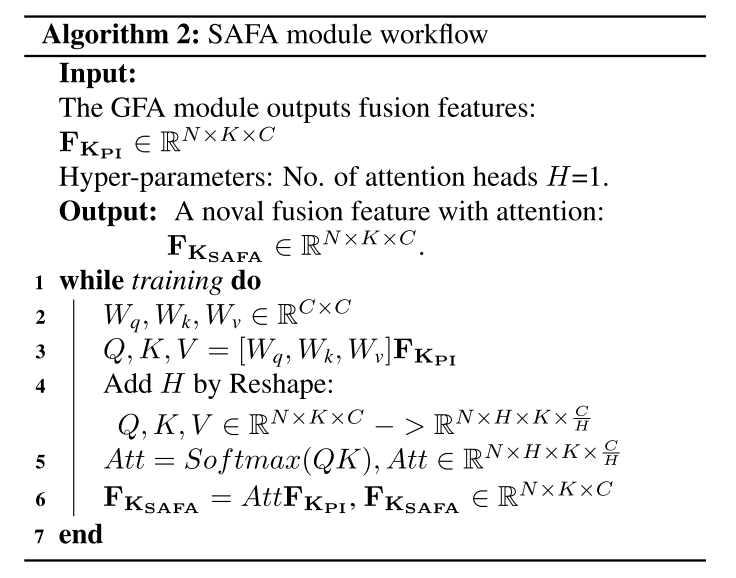
图 4.SAFA 模块流程
这里简化了head和max模块,SAFA模块旨在通过改善K邻域之间的全局上下文信息来增强融合特征的表示。
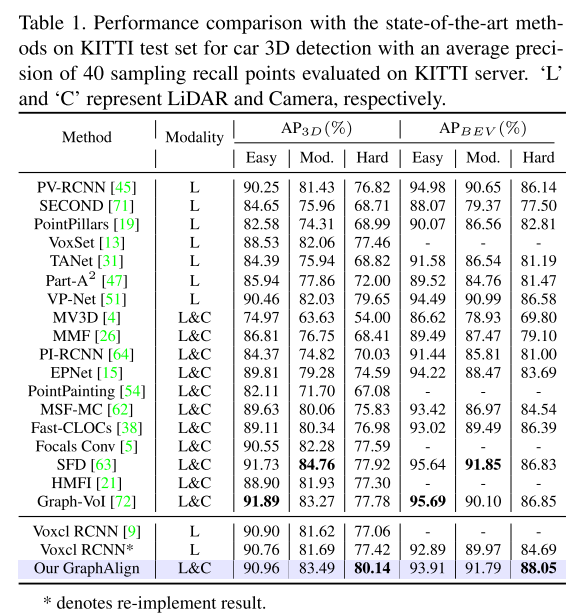
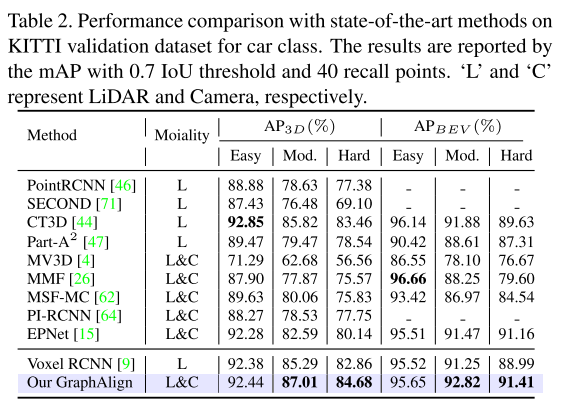
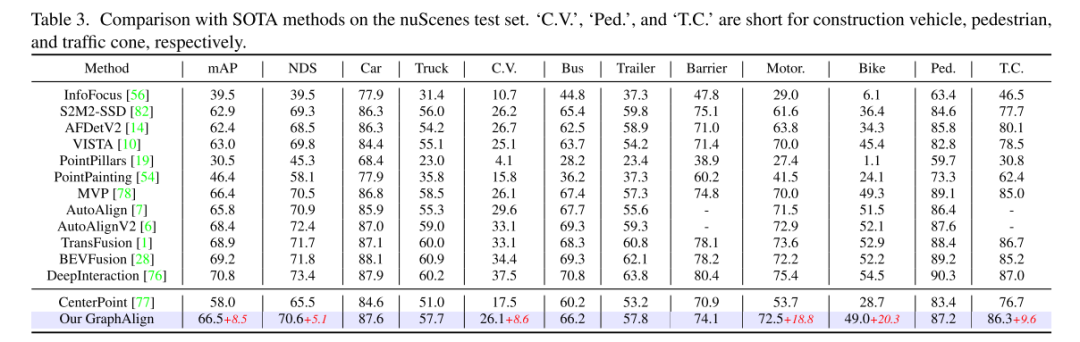
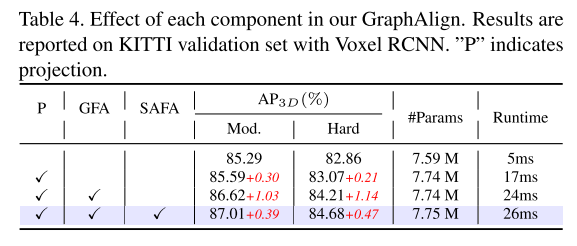
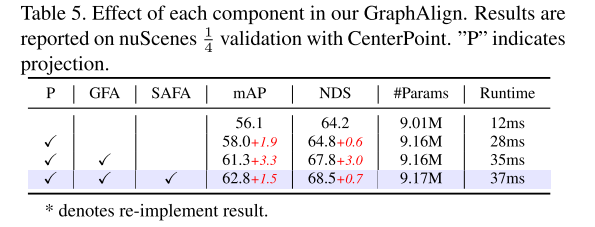
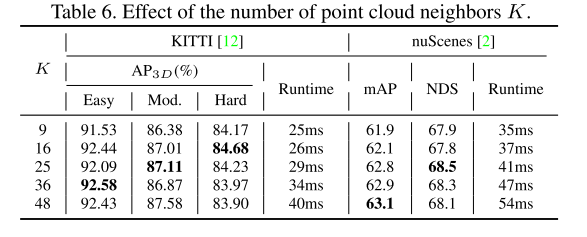
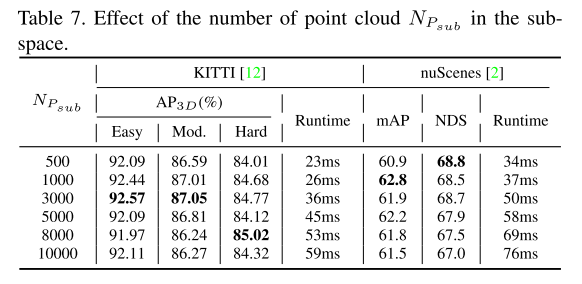
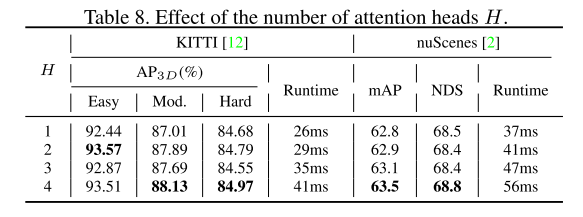
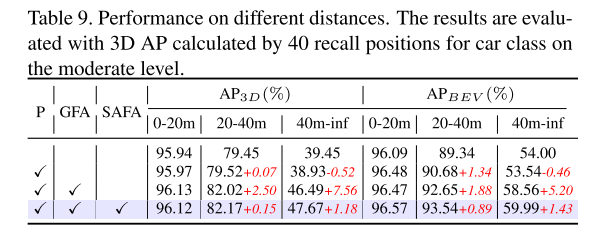
实验结果:
引用:
Song, Z., Wei, H., Bai, L., Yang, L., & Jia, C. (2023). GraphAlign: Enhancing Accurate Feature Alignment by Graph matching for Multi-Modal 3D Object Detection. ArXiv. /abs/2310.08261

原文链接:https://mp.weixin.qq.com/s/eN6THT2azHvoleT1F6MoSw



























