本文经自动驾驶之心公众号授权转载,转载请联系出处。
原标题:Multi-Modal Sensor Fusion and Object Tracking for Autonomous Racing
论文链接:https://arxiv.org/pdf/2310.08114.pdf
代码链接:https://github.com/TUMFTM/FusionTracking
作者单位:慕尼黑工业大学
期刊:IEEE TRANSACTIONS ON INTELLIGENT VEHICLES

论文思路:
对周围目标的可靠检测和跟踪是自动驾驶车辆综合运动预测和规划必不可少的。由于单个传感器的局限性,需要多传感器模态融合来提高整体检测能力。此外,鲁棒运动跟踪对于降低传感器噪声的影响,提高状态估计精度至关重要。自动驾驶汽车软件的可靠性在复杂、竞争激烈的高速场景下变得更加重要。本文提出了一种适用于高速应用的模块化多模态传感器融合与跟踪方法。该方法基于扩展卡尔曼滤波器(Extended Kalman Filter) (EKF),能够融合异构检测输入来一致地跟踪周围物体。一种新颖的延迟补偿方法能够减少感知软件延迟的影响,并输出一个更新的目标列表。这是第一个在Indy Autonomous Challenge 2021和CES (AC@CES) 2022的高速现实场景中验证的融合和跟踪方法,证明了它在嵌入式系统上的鲁棒性和计算效率。它不需要任何标记数据,实现0.1 m以下的位置跟踪残差(residuals)。
主要贡献:
一种用于多模态异构检测的模块化后期融合方法
一种通过运动学前后积分(kinematic backward-forward integration)进行延迟补偿的感知软件。
跟踪算法在完整的自动驾驶软件中的实际应用中得到验证,用于速度高达 270 的自动驾驶赛车 [4]、[5]。
网络设计:
基于这些问题,将本文的问题表述如下:本文希望提供一种鲁棒的融合和跟踪方法,该方法能够可靠地处理多种异构传感器模态,并一致且准确地跟踪周围物体的运动。该方法应在现实世界中适用于高速自动驾驶的软件堆栈,这需要低延迟并考虑感知软件延迟。此外,无需标注数据即可适用。本文解决这个问题的后期融合和目标跟踪方法的构建如下。多模态后期融合可以处理来自多个异构检测 pipeline 的输入。原始输入会被过滤以查找偏离轨道的目标以及每个目标的多次检测。然后,基于距离的匹配将过滤后的目标列表与当前跟踪的目标按时间顺序关联起来。如果匹配成功,则将扩展卡尔曼滤波器 (EKF) 应用于运动模型以进行状态估计。该方法的一个重要特征是延迟补偿:由于检测输入的延迟,在观测存储中应用向后搜索来获取传感器时间戳处的跟踪目标。然后,历史状态的优化状态估计与运动学模型前向集成,以将所有存储 entries 更新到当前时间戳。通过这种方式,运动预测和自我运动规划接收周围目标的更新、优化的轨迹。图 1 显示了 2022 年 CES (AC@CES) 自动驾驶挑战赛上记录的所提出方法的典型场景,包括脱轨滤波器(黑色)、延迟感知(橙色虚线)和补偿优化状态估计(橙色立方体)。
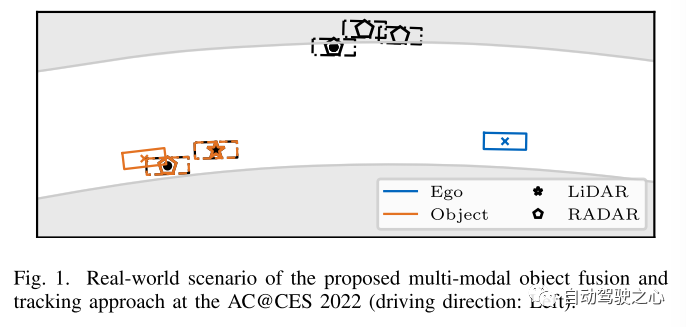
图 1. AC@CES 2022 上提出的多模态目标融合和跟踪方法的真实场景(行驶方向:左)。

图2.多模态传感器融合和目标跟踪方法的接口(黑色)和结构。

图 3. AC@CES 2022 上的示例高速现实场景。ego 速度为 255 ,物体速度为 233 。

图 4. LiDAR(蓝色)和 RADAR(橙色)检测输入数据的数据分析。
实验结果:
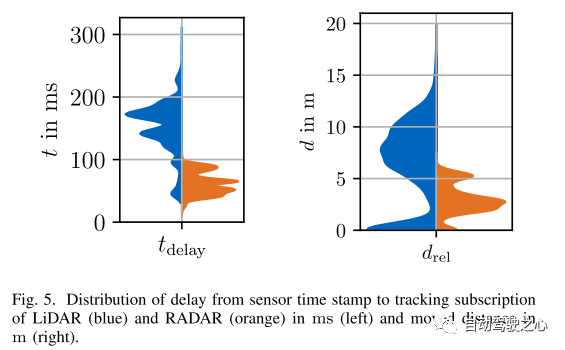
图 5. 从传感器时间戳到 LiDAR(蓝色)和 RADAR(橙色)跟踪 subscription 的延迟分布(以毫秒为单位)(左)和移动距离(以米为单位)(右)。
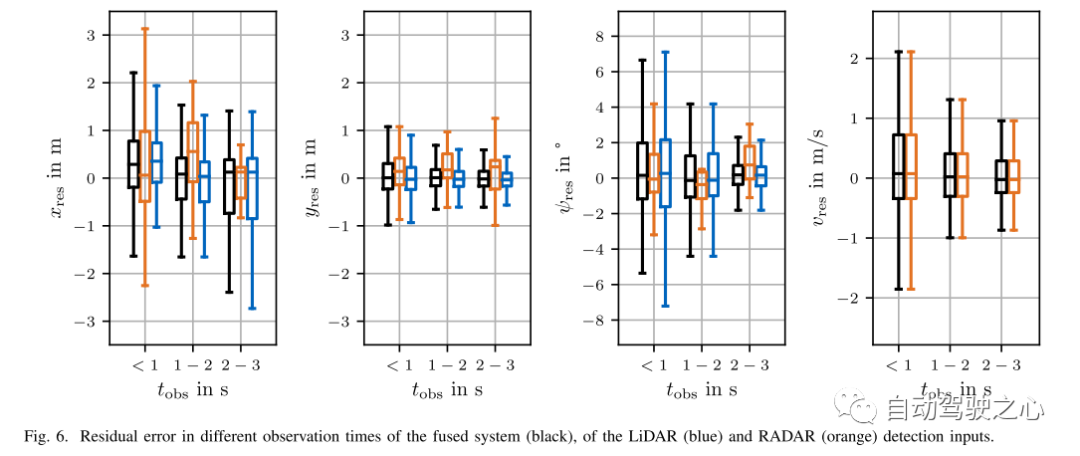
图 6. 融合系统(黑色)、LiDAR(蓝色)和 RADAR(橙色)检测输入在不同观测时间的残差(Residual error)。

引用:
Karle, P., Fent, F., Huch, S., Sauerbeck, F., & Lienkamp, M. (2023). Multi-Modal Sensor Fusion and Object Tracking for Autonomous Racing. ArXiv. https://doi.org/10.1109/TIV.2023.3271624

原文链接:https://mp.weixin.qq.com/s/v4Mmghz-g5iKSQ4S4oSM_A