













本文经自动驾驶之心公众号授权转载,转载请联系出处。
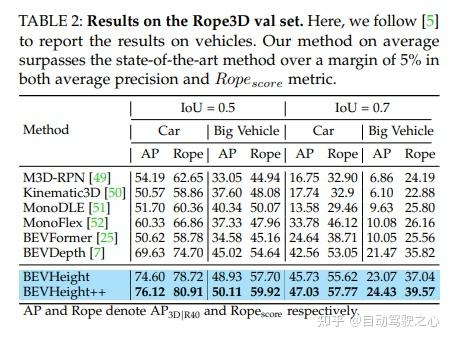
回归到地面的高度,以实现距离不可知的公式,从而简化仅相机感知方法的优化过程。在路侧camera的3D检测基准上,方法大大超过了以前所有以视觉为中心的方法。它比BEVDepth产生了+1.9%的NDS和+1.1%的mAP的显著改善。在nuScenes测试集上,方法取得了实质性的进步,NDS和mAP分别增加了+2.8%和+1.7%。
题目:BEVHeight++: Toward Robust Visual Centric 3D Object Detection
论文链接:https://arxiv.org/pdf/2309.16179.pdf
作者单位:清华大学,中山大学,菜鸟网络,北京大学
出自国内首个自动驾驶社区:终于完成了20+技术方向学习路线的搭建(BEV感知/3D检测/多传感器融合/SLAM与规划等)
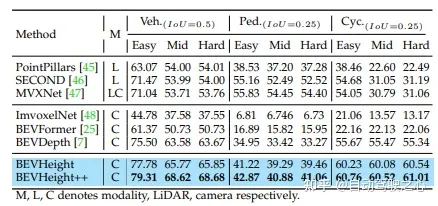
虽然最近的自动驾驶系统专注于开发自车辆传感器的感知方法,但人们往往忽视了一种利用智能路边摄像头将感知能力扩展到视觉范围之外的替代方法。作者发现,最先进的以视觉为中心的BEV检测方法在路边摄像头上的性能较差。这是因为这些方法主要集中在恢复关于相机中心的深度,在相机中心,汽车和地面之间的深度差随着距离的增加而迅速缩小。在本文中,作者提出了一种简单而有效的方法,称为BEVHeight++,来解决这个问题。本质上,作者回归到地面的高度,以实现距离不可知的公式,从而简化仅相机感知方法的优化过程。通过结合高度和深度编码技术,实现了从2D到BEV空间的更准确和稳健的投影。在路边摄像头的流行3D检测基准上,方法大大超过了以前所有以视觉为中心的方法。就自车辆场景而言,BEVHeight++具有优于仅深度的方法。
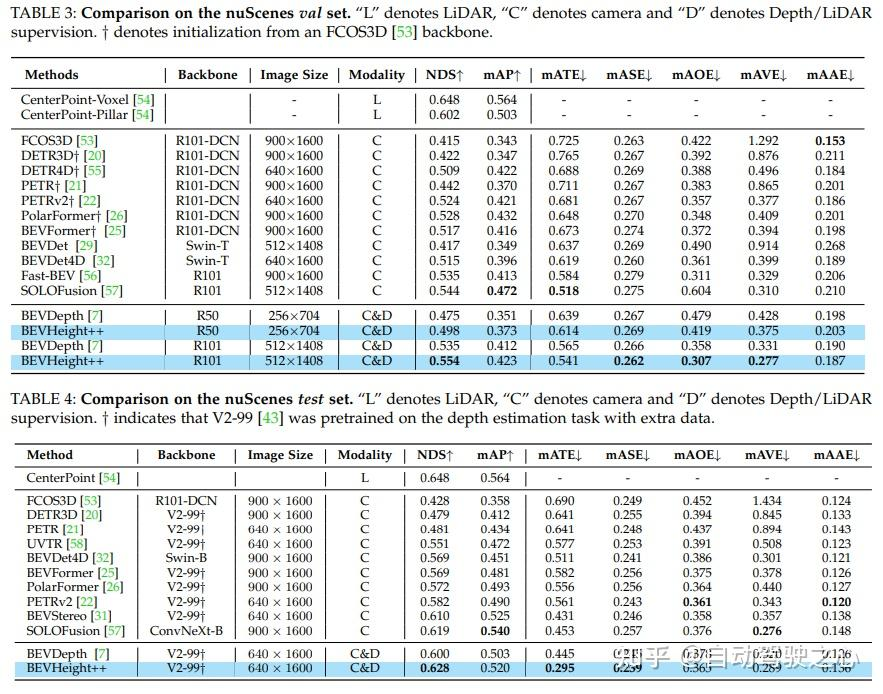
具体而言,在nuScenes验证集上进行评估时,它比BEVDepth产生了+1.9%的NDS和+1.1%的mAP的显著改善。此外,在nuScenes测试集上,方法取得了实质性的进步,NDS和mAP分别增加了+2.8%和+1.7%。
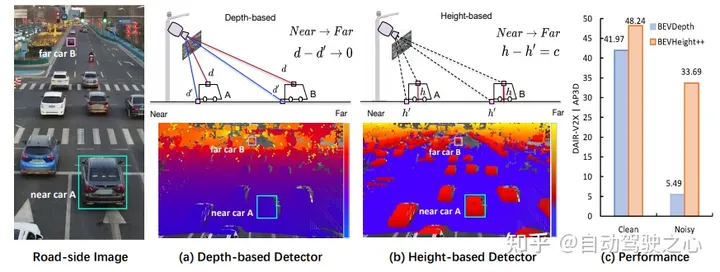
图1:(a)为了从单目图像中产生3D边界框,最先进的方法首先显式或隐式地预测每像素深度,以确定前景对象与背景的3D位置。然而,当我们在图像上绘制每像素深度时,我们注意到,当汽车远离相机时,车顶和周围地面上的点之间的差异会迅速缩小,这使得优化变得次优,尤其是对于远处的物体。(b) 相反,我们绘制了到地面的每像素高度,并观察到无论距离如何,这种差异都是不可知的,并且在视觉上更适合网络检测目标。然而,不能仅通过预测高度来直接回归3D位置。(c) 为此,我们提出了一个新的框架BEVHeight++来解决这个问题。经验结果表明,我们的方法在干净设置上超过了最佳方法5.49%,在嘈杂设置上超过28.2%。
网络结构
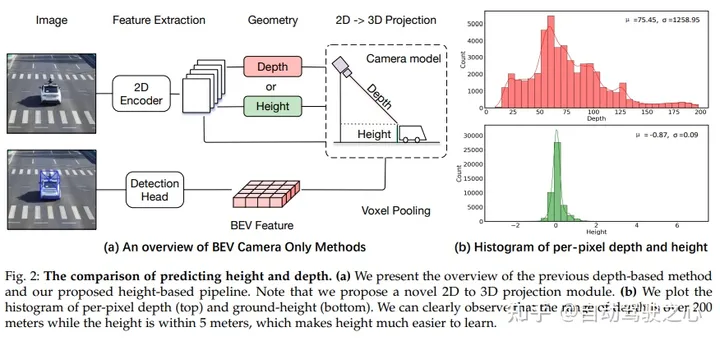
预测高度和深度的比较。(a) 概述了以前基于深度的方法和我们提出的基于高度的管道。请注意,本文提出了一种新颖的2D到3D投影模块。(b) 绘制每像素深度(顶部)和地面高度(底部)的直方图,可以清楚地观察到,深度范围超过200米,而高度在5米以内,这使得高度更容易学习。
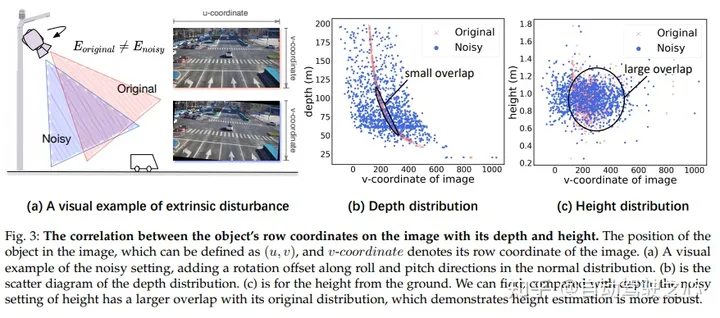
目标在图像上的行坐标与其深度和高度之间的相关性。目标在图像中的位置,可以定义为(u,v),v坐标表示图像的行坐标。(a) 噪声设置的视觉示例,在正态分布中添加沿滚转和俯仰方向的旋转偏移。(b) 是深度分布的散点图。(c) 是指离地高度。可以发现,与深度相比,高度的噪声设置与其原始分布有更大的重叠,这表明高度估计更具鲁棒性。
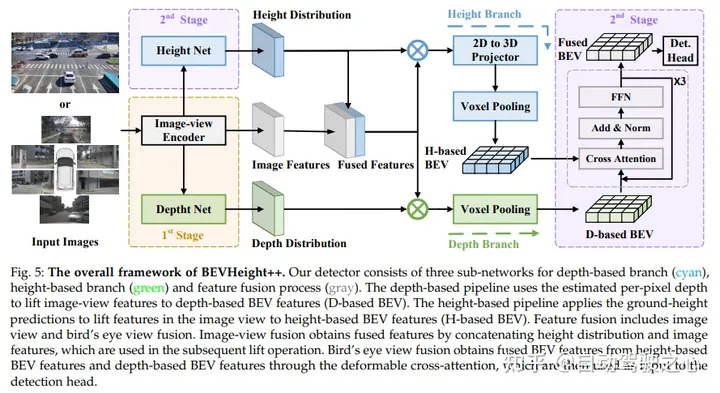
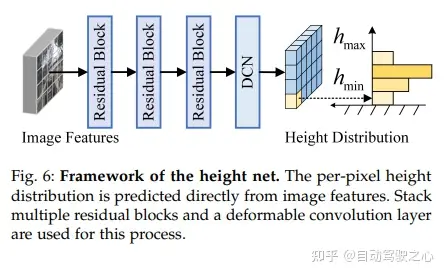
BEVHeight++的总体框架,检测器由三个子网络组成,分别是基于深度的分支(青色)、基于高度的分支(绿色)和特征融合过程(灰色)。基于深度的pipeline使用估计的每像素深度来将图像视图特征提升为基于深度的BEV特征(基于D的BEV)。基于高度的pipeline将对图像视图中升力特征的地面高度预测应用于基于高度的BEV特征(基于H的BEV)。特征融合包括图像融合和鸟瞰融合。图像-视图融合通过级联高度分布和图像特征来获得融合的特征,这些特征用于后续的提升操作。鸟瞰图融合通过可变形交叉注意力从基于高度的BEV特征和基于深度的BEV特性中获得融合的BEV特点,然后将其用作检测头的输入。
实验结果

原文链接:https://mp.weixin.qq.com/s/AdCXYzHIy2lTfAHk2AZ4_w























