近日,深度学习领域知名研究者、Lightning AI 的首席人工智能教育者 Sebastian Raschka 在 CVPR 2023 上发表了主题演讲「Scaling PyTorch Model Training With Minimal Code Changes」。

为了能与更多人分享研究成果,Sebastian Raschka 将演讲整理成一篇文章。文章探讨了如何在最小代码更改的情况下扩展 PyTorch 模型训练,并表明重点是利用混合精度(mixed-precision)方法和多 GPU 训练模式,而不是低级机器优化。
文章使用视觉 Transformer(ViT)作为基础模型,ViT 模型在一个基本数据集上从头开始,经过约 60 分钟的训练,在测试集上取得了 62% 的准确率。

GitHub 地址:https://github.com/rasbt/cvpr2023
以下是文章原文:
构建基准
在接下来的部分中,Sebastian 将探讨如何在不进行大量代码重构的情况下改善训练时间和准确率。
想要注意的是,模型和数据集的详细信息并不是这里的主要关注点(它们只是为了尽可能简单,以便读者可以在自己的机器上复现,而不需要下载和安装太多的依赖)。所有在这里分享的示例都可以在 GitHub 找到,读者可以探索和重用完整的代码。

脚本 00_pytorch-vit-random-init.py 的输出。
不要从头开始训练
现如今,从头开始训练文本或图像的深度学习模型通常是低效的。我们通常会利用预训练模型,并对模型进行微调,以节省时间和计算资源,同时获得更好的建模效果。
如果考虑上面使用的相同 ViT 架构,在另一个数据集(ImageNet)上进行预训练,并对其进行微调,就可以在更短的时间内实现更好的预测性能:20 分钟(3 个训练 epoch)内达到 95% 的测试准确率。
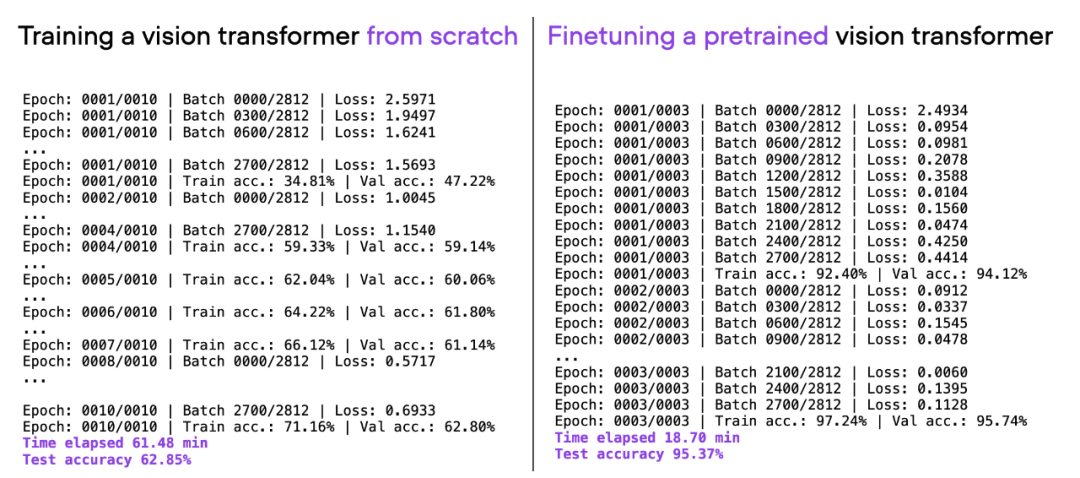
00_pytorch-vit-random-init.py 和 01_pytorch-vit.py 的对比。
提升计算性能
我们可以看到,相对于从零开始训练,微调可以大大提升模型性能。下面的柱状图总结了这一点。
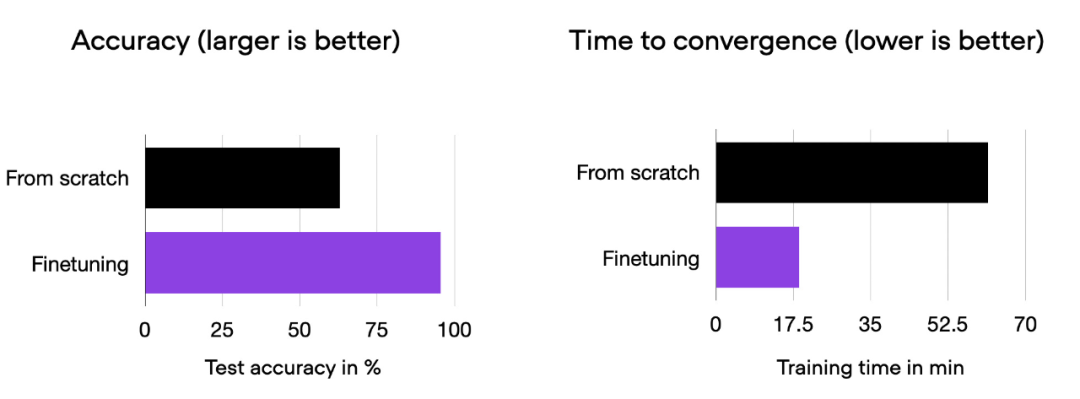
00_pytorch-vit-random-init.py 和 01_pytorch-vit.py 的对比柱状图。
当然,模型效果可能因数据集或任务的不同而有所差异。但对于许多文本和图像任务来说,从一个在通用公共数据集上预训练的模型开始是值得的。
接下来的部分将探索各种技巧,以加快训练时间,同时又不牺牲预测准确性。
开源库 Fabric
在 PyTorch 中以最小代码更改来高效扩展训练的一种方法是使用开源 Fabric 库,它可以看作是 PyTorch 的一个轻量级包装库 / 接口。通过 pip 安装。
pip install lightning下面探索的所有技术也可以在纯 PyTorch 中实现。Fabric 的目标是使这一过程更加便利。
在探索「加速代码的高级技术」之前,先介绍一下将 Fabric 集成到 PyTorch 代码中需要进行的小改动。一旦完成这些改动,只需要改变一行代码,就可以轻松地使用高级 PyTorch 功能。
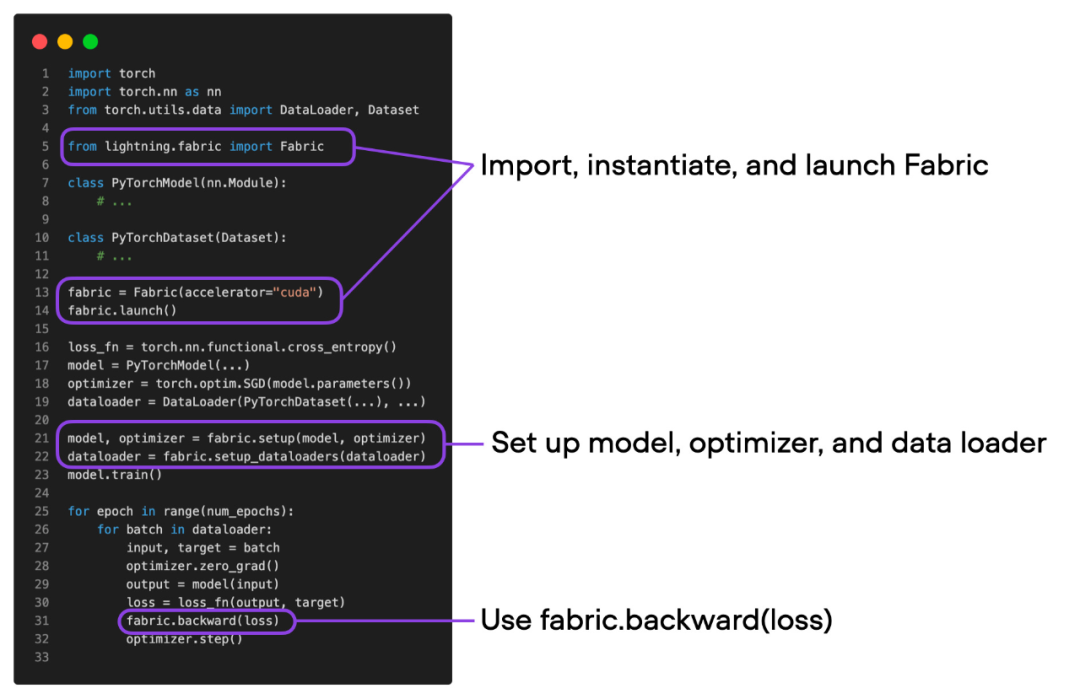
PyTorch 代码和修改后使用 Fabric 的代码之间的区别是微小的,只涉及到一些细微的修改,如下面的代码所示:
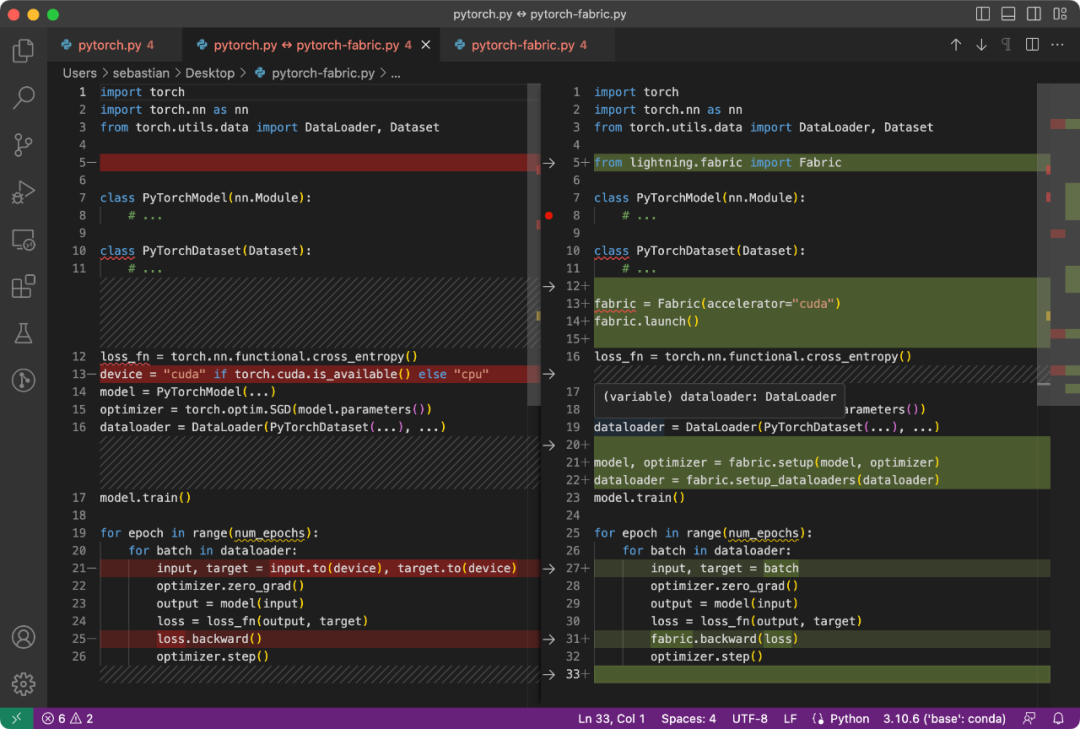
普通 PyTorch 代码(左)和使用 Fabric 的 PyTorch 代码
总结一下上图,就可以得到普通的 PyTorch 代码转换为 PyTorch+Fabric 的三个步骤:
- 导入 Fabric 并实例化一个 Fabric 对象。
- 使用 Fabric 设置模型、优化器和 data loader。
- 损失函数使用 fabric.backward (),而不是 loss.backward ()。
这些微小的改动提供了一种利用 PyTorch 高级特性的途径,而无需对现有代码进行进一步重构。
深入探讨下面的「高级特性」之前,要确保模型的训练运行时间、预测性能与之前相同。
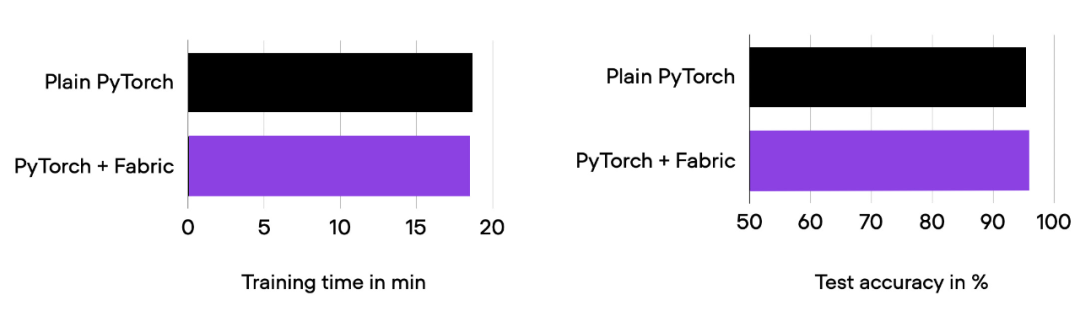
01_pytorch-vit.py 和 03_fabric-vit.py 的比较结果。
正如前面柱状图中所看到的,训练运行时间、准确率与之前完全相同,正如预期的那样。其中,任何波动都可以归因于随机性。
在前面的部分中,我们使用 Fabric 修改了 PyTorch 代码。为什么要费这么大的劲呢?接下来将尝试高级技术,比如混合精度和分布式训练,只需更改一行代码,把下面的代码
fabric = Fabric(accelerator="cuda")改为
fabric = Fabric(accelerator="cuda", precisinotallow="bf16-mixed")
04_fabric-vit-mixed-precision.py 脚本的比较结果。脚本地址:https://github.com/rasbt/cvpr2023/blob/main/04_fabric-vit-mixed-precision.py
通过混合精度训练,我们将训练时间从 18 分钟左右缩短到 6 分钟,同时保持相同的预测性能。这种训练时间的缩短只需在实例化 Fabric 对象时添加参数「precisinotallow="bf16-mixed"」即可实现。
理解混合精度机制
混合精度训练实质上使用了 16 位和 32 位精度,以确保不会损失准确性。16 位表示中的计算梯度比 32 位格式快得多,并且还节省了大量内存。这种策略在内存或计算受限的情况下非常有益。
之所以称为「混合」而不是「低」精度训练,是因为不是将所有参数和操作转换为 16 位浮点数。相反,在训练过程中 32 位和 16 位操作之间切换,因此称为「混合」精度。
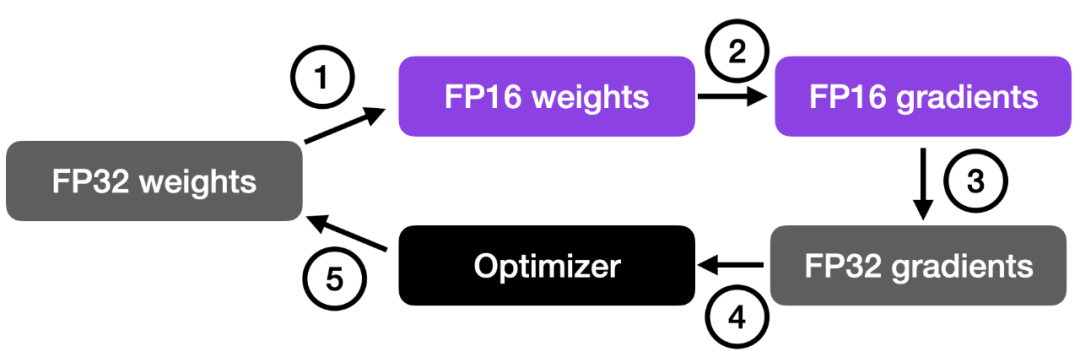
如下图所示,混合精度训练涉及步骤如下:
- 将权重转换为较低精度(FP16)以加快计算速度;
- 计算梯度;
- 将梯度转换回较高精度(FP32)以保持数值稳定性;
- 使用缩放后的梯度更新原始权重。
这种方法在保持神经网络准确性和稳定性的同时,实现了高效的训练。
更详细的步骤如下:
- 将权重转换为 FP16:在这一步中,神经网络的权重(或参数)初始时用 FP32 格式表示,将其转换为较低精度的 FP16 格式。这样可以减少内存占用,并且由于 FP16 操作所需的内存较少,可以更快地被硬件处理。
- 计算梯度:使用较低精度的 FP16 权重进行神经网络的前向传播和反向传播。这一步计算损失函数相对于网络权重的梯度(偏导数),这些梯度用于在优化过程中更新权重。
- 将梯度转换回 FP32:在计算得到 FP16 格式的梯度后,将其转换回较高精度的 FP32 格式。这种转换对于保持数值稳定性非常重要,避免使用较低精度算术时可能出现的梯度消失或梯度爆炸等问题。
- 乘学习率并更新权重:以 FP32 格式表示的梯度乘以学习率将用于更新权重(标量值,用于确定优化过程中的步长)。
步骤 4 中的乘积用于更新原始的 FP32 神经网络权重。学习率有助于控制优化过程的收敛性,对于实现良好的性能非常重要。
Brain Float 16
前面谈到了「float 16-bit」精度训练。需要注意的是,在之前的代码中,指定了 precisinotallow="bf16-mixed",而不是 precisinotallow="16-mixed"。这两个都是有效的选项。
在这里,"bf16-mixed" 中的「bf16」表示 Brain Floating Point(bfloat16)。谷歌开发了这种格式,用于机器学习和深度学习应用,尤其是在张量处理单元(TPU)中。Bfloat16 相比传统的 float16 格式扩展了动态范围,但牺牲了一定的精度。
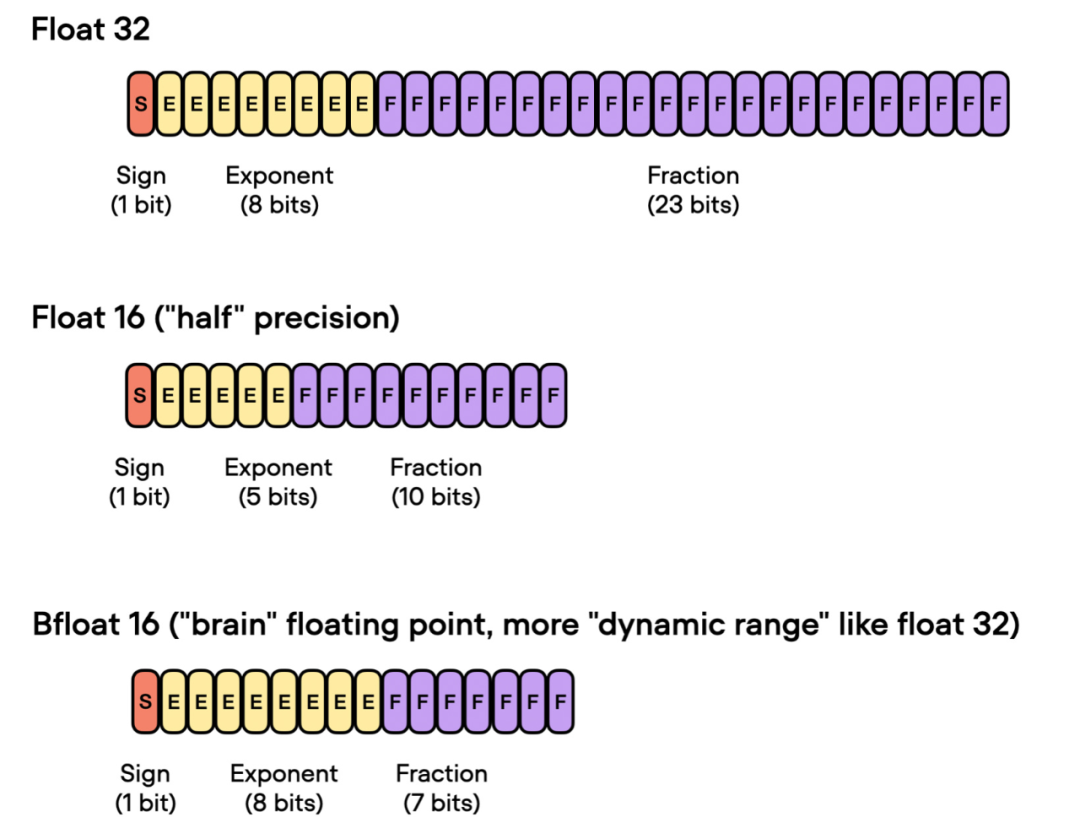
扩展的动态范围使得 bfloat16 能够表示非常大和非常小的数字,使其更适用于深度学习应用中可能遇到的数值范围。然而,较低的精度可能会影响某些计算的准确性,或在某些情况下导致舍入误差。但在大多数深度学习应用中,这种降低的精度对建模性能的影响很小。
虽然 bfloat16 最初是为 TPU 开发的,但从 NVIDIA Ampere 架构的 A100 Tensor Core GPU 开始,已经有几种 NVIDIA GPU 开始支持 bfloat16。
我们可以使用下面的代码检查 GPU 是否支持 bfloat16:
>>> torch.cuda.is_bf16_supported()
True如果你的 GPU 不支持 bfloat16,可以将 precisinotallow="bf16-mixed" 更改为 precisinotallow="16-mixed"。
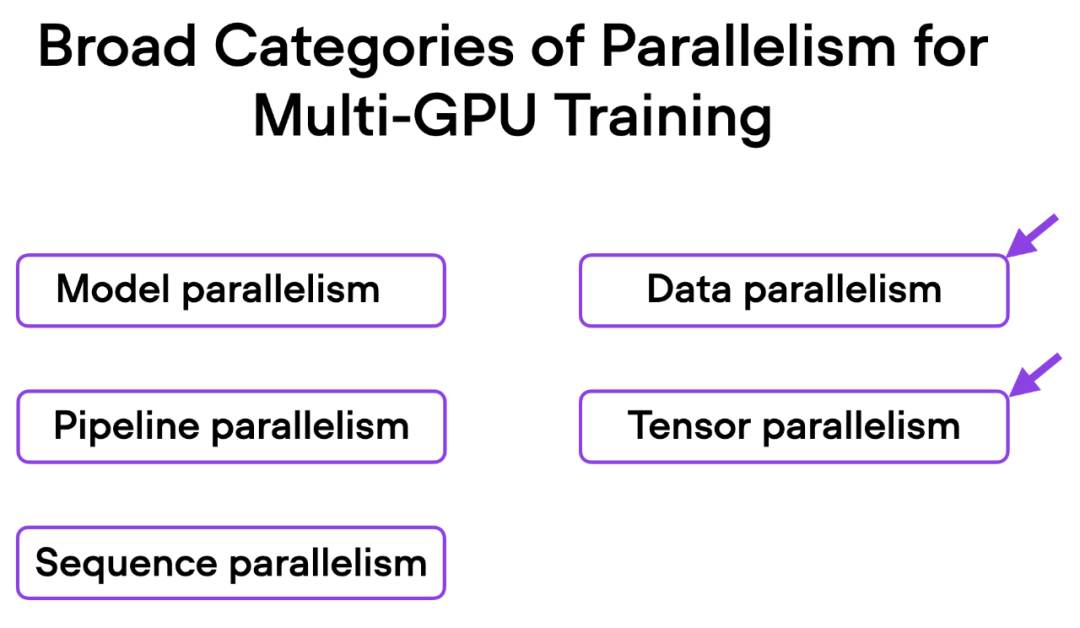
多 GPU 训练和完全分片数据并行
接下来要尝试修改多 GPU 训练。如果我们有多个 GPU 可供使用,这会带来好处,因为它可以让我们的模型训练速度更快。
这里介绍一种更先进的技术 — 完全分片数据并行(Fully Sharded Data Parallelism (FSDP)),它同时利用了数据并行性和张量并行性。
在 Fabric 中,我们可以通过下面的方式利用 FSDP 添加设备数量和多 GPU 训练策略:
fabric = Fabric(
accelerator="cuda", precisinotallow="bf16-mixed",
devices=4, strategy="FSDP" # new!
)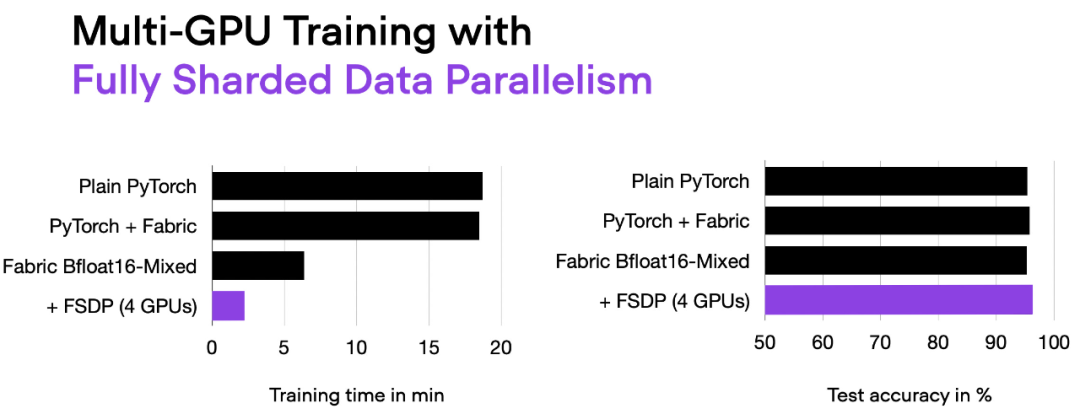
06_fabric-vit-mixed-fsdp.py 脚本的输出。
现在使用 4 个 GPU,我们的代码运行时间大约为 2 分钟,是之前仅使用混合精度训练时的近 3 倍。
理解数据并行和张量并行
在数据并行中,小批量数据被分割,并且每个 GPU 上都有模型的副本。这个过程通过多个 GPU 的并行工作来加速模型的训练速度。

如下简要概述了数据并行的工作原理:
- 同一个模型被复制到所有的 GPU 上。
- 每个 GPU 分别接收不同的输入数据子集(不同的小批量数据)。
- 所有的 GPU 独立地对模型进行前向传播和反向传播,计算各自的局部梯度。
- 收集并对所有 GPU 的梯度求平均值。
- 平均梯度被用于更新模型的参数。
每个 GPU 都在并行地处理不同的数据子集,通过梯度的平均化和参数的更新,整个模型的训练过程得以加速。
这种方法的主要优势是速度。由于每个 GPU 同时处理不同的小批量数据,模型可以在更短的时间内处理更多的数据。这可以显著减少训练模型所需的时间,特别是在处理大型数据集时。
然而,数据并行也有一些限制。最重要的是,每个 GPU 必须具有完整的模型和参数副本。这限制了可以训练的模型大小,因为模型必须适应单个 GPU 的内存。这对于现代的 ViTs 或 LLMs 来说这是不可行的。
与数据并行不同,张量并行将模型本身划分到多个 GPU 上。并且在数据并行中,每个 GPU 都需要适 应整个模型,这在训练较大的模型时可能成为一个限制。而张量并行允许训练那些对单个 GPU 而言可能过大的模型,通过将模型分解并分布到多个设备上进行训练。
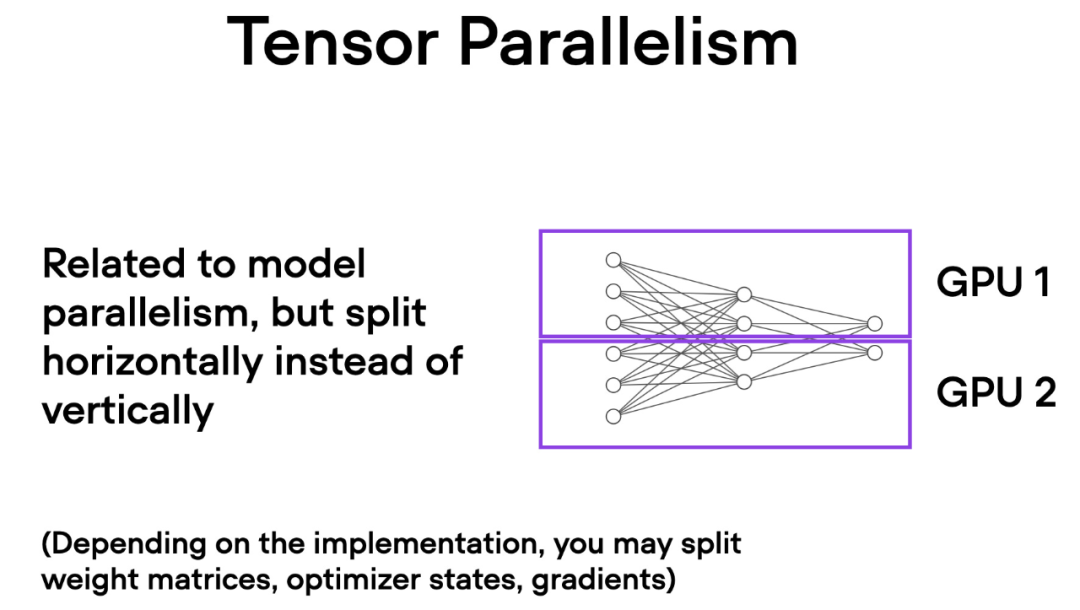
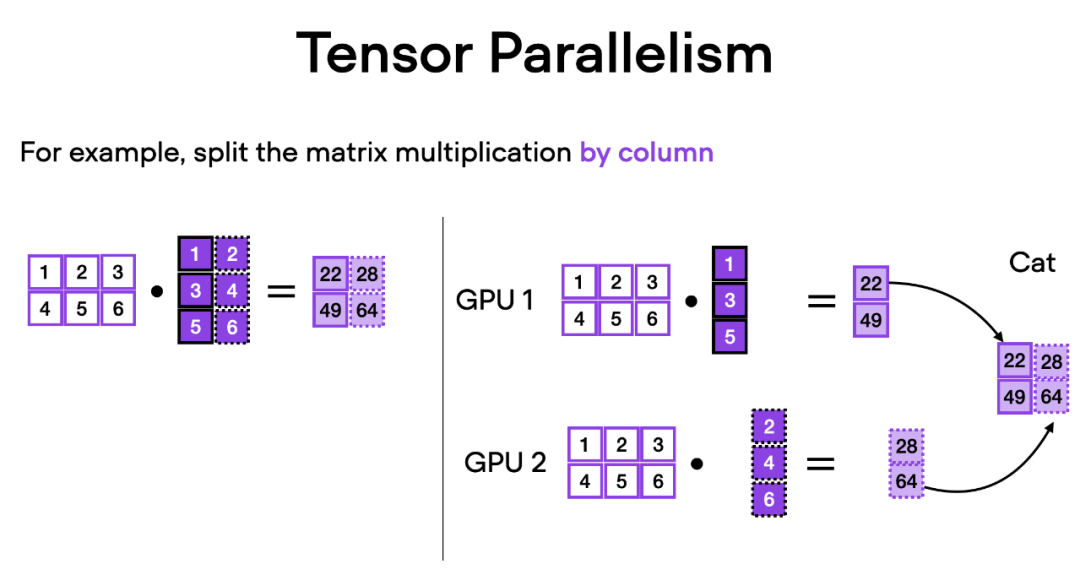
张量并行是如何工作的呢?想象一下矩阵乘法,有两种方式可以进行分布计算 —— 按行或按列。为了简单起见,考虑按列进行分布计算。例如,我们可以将一个大型矩阵乘法操作分解为多个独立的计算,每个计算可以在不同的 GPU 上进行,如下图所示。然后将结果连接起来以获取结果,这有效地分摊了计算负载。