arXiv论文“Ithaca365: Dataset and Driving Perception under Repeated and Challenging Weather Conditions“,22年8月1日上传,Cornell和Ohio State两个大学的工作。
近年来,由于采用大规模数据集,自动驾驶汽车的感知能力有所提高,这些数据集通常在特定位置和良好的天气条件下收集。然而,为了达到高安全要求,这些感知系统必须在各种天气条件下鲁棒运行,包括雪和雨的情况。
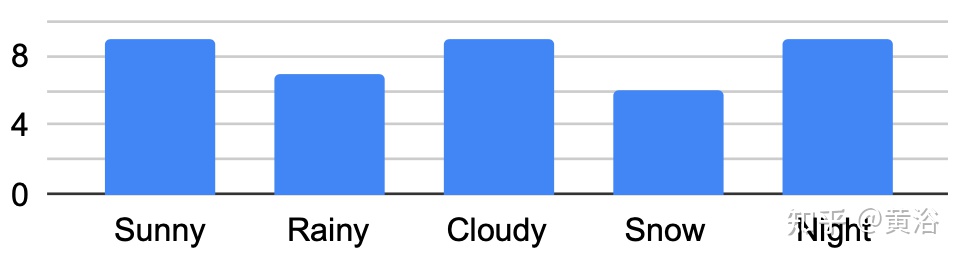
本文提出了一个实现鲁棒自主驾驶的数据集,采用一个新数据收集过程,即在不同场景(城市、公路、农村、校园)、天气(雪、雨、太阳)、时间(白天/晚上)和交通条件(行人、自行车手和汽车)下,沿着15公里的路线重复记录数据。
该数据集包括来自摄像机和激光雷达传感器的图像和点云,以及高精度GPS/INS,建立跨路线的对应关系。该数据集包括道路和目标标注,具有非模态(amodal)掩码捕捉的局部遮挡和3-D边框。
重复路径为目标发现、连续学习和异常检测开辟了新的研究方向。
Ithaca365链接:A new dataset to enable robust autonomous driving via a novel data collection process
如图是数据采集的传感器配置:

如图a显示了路线图,其中包含在多个位置捕获的图像。驾驶被安排在一天中的不同时间采集数据,包括晚上。在道路清理之前和之后,记录大雪情况。

数据集的一个关键特色是,在不同的条件下可以观察到相同的位置;图b中显示了一个示例。

如图显示了不同条件下的遍历解析:
开发一个自定义标记工具,用于获取道路和目标的非模态掩码。对于不同环境条件下的道路标签,例如积雪覆盖的道路,用相同路线的重复遍历。具体而言,通过GPS姿态和激光雷达数据构建的点云道路地图,将“好天气”的道路标签转换为“恶劣天气”。
路线/数据分为76个区间。将点云投影到BEV中,并使用多边形标注器标记道路。一旦在BEV中标记了道路(生成2-D道路边界),将多边形分解为较小的150 m^2多边形,采用平均高度1.5 m的阈值,多边形边界内的点做平面拟合来确定道路高度。
用RANSAC和回归器将平面拟合到这些点;然后用估计的地平面计算沿边界每个点的高度。将道路点投影到图像中,并创建深度(depth)掩码,获得道路的非模态标签。将位置与带有GPS的标记地图匹配,并用ICP优化路线,可以将地平面投影到新收集路线的特定位置。
对ICP解决方案进行最终检查,其方法是验证道路标签的平均投影真值掩码与相同位置的所有其他真值掩码符合80% mIOU;如果不符合,则查询位置数据不会被检索到。
非模态目标用Scale AI标记的六种前景目标类别:汽车、公共汽车、卡车(包括货物、消防车、皮卡、救护车)、行人、自行车手和摩托车手。
这种标记范式有三个主要组成部分:首先识别目标的可见实例,然后推断被遮挡的实例分割掩码,最后标记每个目标的遮挡顺序。在最左侧的前向摄影机视图上执行标记。遵循与KINS(“Amodal instance segmentation with kins dataset“. CVPR,2019)相同的标准。
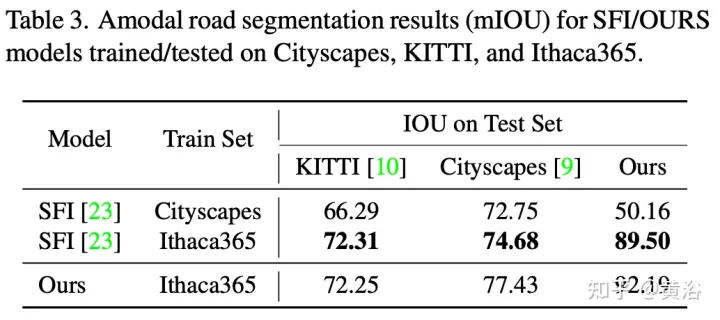
为了展示数据集的环境多样性和非模态质量,训练并测试了两个基线网络,以在像素级识别非模态道路,即使道路被雪或汽车覆盖也能工作。第一个基线网络是Semantic Foreground Inpainting(SFI)。第二个基线,如图所示,采用以下三个创新改进SFI。
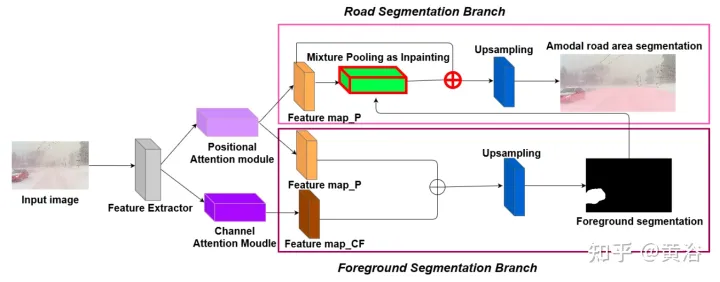
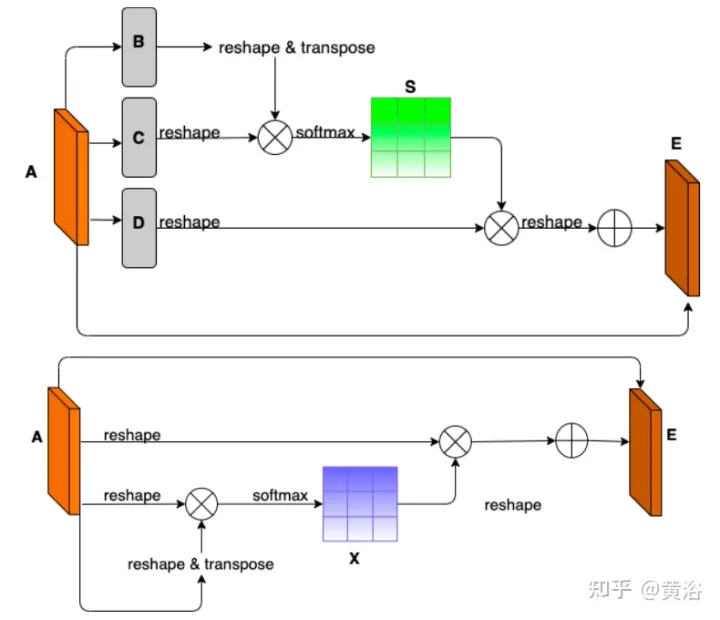
- 位置和通道注意:因为非模态分割主要推断什么是不可见的,所以上下文是一个非常重要的线索。DAN(“Dual attention network for scene segmentation“,CVPR‘2019)引入了两项创新,捕捉两种不同的背景。位置注意模块(PAM)使用像素特征关注图像的其他像素,实际上从图像的其他部分捕获上下文。通道注意模块(CAM)使用类似的注意机制,有效地聚集通道的信息。这里在主干特征提取器上应用这两个模块。结合CAM和PAM更好地定位精细掩码边界。通过上采样层获得最终前景实例掩码。
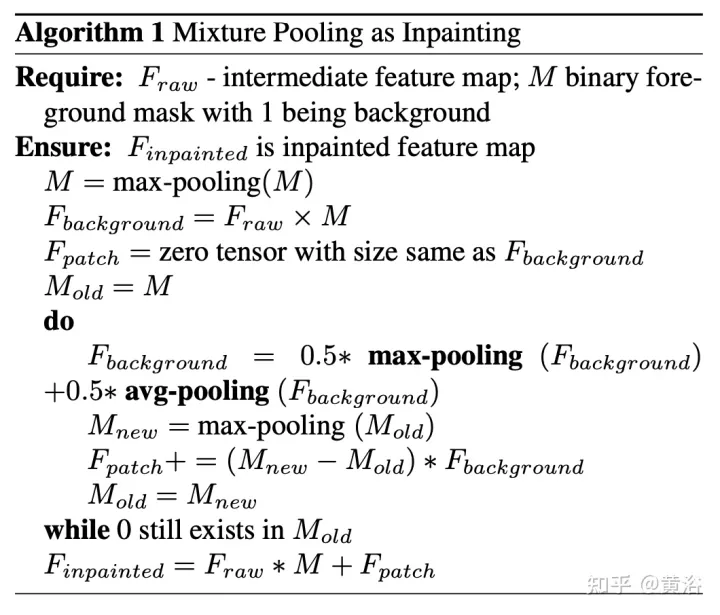
- 混合池化作修补(inpainting):最大池化作为修补操作,将重叠的前景特征替换为附近的背景特征,帮助恢复非模态道路特征。然而,由于背景特征通常是平滑分布的,因此最大池化操作对添加的任何噪声非常敏感。相反,平均池化操作可以自然地减轻噪声。为此,结合平均池化和最大池化进行修补,称之为混合池化(Mixture Pooling)。
- 求和运算:在最后上采样层之前,不直接传递来自混合池化模块的特征,而是包含来自PAM模块输出的残余链接。通过在道路分割分支中联合优化两个特征图,PAM模块还可以学习遮挡区域的背景特征。这可以带来更准确地恢复背景特征。
如图是PAM和CAM的架构图:
混合池化做修补的算法伪代码如下所示:
非模态道路分割的训练和测试代码如下:https://github. com/coolgrasshopper/amodal_road_segmentation
实验结果如下: