2022年,自动驾驶的竞争毫无悬念的来到了乘用车辅助驾驶的规模之战。围绕这场大战,业内已经陷入到车上到底要搭载几个激光雷达才能算高端的“内卷之争”。
商业的归商业,技术的归技术。回到自动驾驶的技术发展路线上,我们还是要注意到行业的这样一个趋势,那就是自动驾驶的感知路线到底该怎么走?
很多行业人士可能注意到了,在今年4月由毫末智行举办的2022 HAOMO AI DAY上,在一如既往地对外进行自动驾驶技术布道的丰富信息中,可以捕捉到一个非常明确的信号,那就是毫末智行在感知智能当中对于“重感知”方案的重视。

具体来说,基于毫末智行数据智能体系MANA的HPilot 3.0会降低对高精地图的依赖,即使在没有高精地图覆盖的城市场景中,也能依靠强大的感知能力实现高级辅助驾驶。这就是所谓的“重感知”。
这是一个非常值得讨论的变化。根据毫末智行CEO顾维灏的解释,这是毫末智行对于自动驾驶第一性原理思考的一个结果——毫末智行自动驾驶的进化更多依赖数据智能体系MANA的进步,其中依赖视觉数据的感知智能的进化是其关键。
那么,毫末智行这样做的具体思考是什么呢?对于自动驾驶技术路线的发展有怎样的借鉴意义呢?
自动驾驶的第一性原理:感知智能优先
当然,毫末智行并不是最先提出选择“重感知”路线的自动驾驶企业。
众所周知,特斯拉是第一家采用纯视觉技术方案的自动驾驶企业。这一转变从去年7月特斯拉发布FSD 9.0开始,同时特斯拉也推出了支持城市场景的高级辅助驾驶功能。
今年4月,海外一位特斯拉车主发布视频,称其在FSD的帮助下,实现了从洛杉矶开车到旧金山近600公里的零接管长途驾驶,场景包含城市、快速路与高速,一时间再次引起舆论对纯视觉方案的关注。
除特斯拉与毫末智行外,华为也在近期谈到了其对自动驾驶技术路线的思考。余承东在5月北汽极狐新车发布会上表示,华为ADS将加强对视觉传感器的应用,不过度依赖高精地图,以快速实现对城市场景的覆盖。
和毫末智行的城市NOH一样,华为在北汽极狐阿尔法S华为HI版上也采用了高精地图+激光雷达+摄像头的多传感器融合感知方案,但华为也强调会通过对高精地图的主动“降权”,ADS可以在今年实现对城市场景的覆盖。
头部自动驾驶企业的快速转变与发展,无疑对自动驾驶技术的发展方向带来了强烈的冲击,而这一切都源于其对第一性原理的剖析。
基于第一性原理我们可知,不论是渐进式路线还是跨越式路线,自动驾驶的底层逻辑是不变的,即依靠AI在行驶过程中进行视觉识别和判断决策。
正如人类主要通过视觉感知世界、实现人工驾驶一样,汽车也应该依靠鲁棒性更强的视觉进行感知和判断,实现自动驾驶。
人类通过不断的观察、学习、模仿与实践,逐步实现由“新手司机”向“老司机”的蜕变,汽车也可以通过大规模真实与仿真道路数据的学习和训练,不断迭代升级辅助驾驶的算法能力,逐步升级到自动驾驶。
在这一过程中,算力、算法与感知硬件的进步为辅助,能够为自动驾驶的到来提供加速。特斯拉、毫末智行、华为便是基于技术进步快速实现了城市域高级辅助驾驶技术的规模化落地,但其核心依旧是数据,数据才是建立并推动自动驾驶进化的真正基石。
由此可见,当下的自动驾驶技术发展正在处在关键抉择期,而关键则是要从根源处找到获取自动驾驶技术圣杯的金钥匙。谁能够率先认识到并付诸实践,谁就能在自动驾驶的下半场竞争中赢得为数不多的席位。
数据智能体系MANA驱动视觉感知进化
毫末智行在仅仅2年多的时间便成为了乘用车辅助驾驶和末端物流自动配送车领域的领先者,其背后的逻辑正是源于对第一性原理的思考和应用。
毫末智行CEO顾维灏认为,算力、算法与感知硬件将随着自动驾驶行业的快速发展迎来性能突破,而数据才是决定自动驾驶实现质变的核心。
此外,毫末智行也认识到,自动驾驶本质上是对人工驾驶的效仿与超越,所以视觉感知能力的强大与否,将成为毫末能够赢得自动驾驶下半场竞争的关键。
以数据智能体系MANA为全新基石假设,毫末智行在2022 HAOMO AI DAY上推出了搭载城市NOH功能的HPilot 3.0;而作为HPilot 3.0的依托,MANA也在不到半年的时间内,完成了感知层面的进化。
对于城市域高级辅助驾驶,毫末智行CEO顾维灏介绍,业内存在两个共同的难题,一个是对红绿灯的识别与对应的路口绑路,另一个则是对车道线的识别。
对红绿灯识别的困难首先来自于全国红绿灯标准的不统一。仅以倒计时来举例,在北京,有的红绿灯采用数字倒计时,有的完全没有倒计时;而天津的红绿灯则采用计时条倒计时。
同样的问题还有红绿灯与对应路口的绑路。以保定三丰路、建国路与朝阳南大街交汇的“十字路口”为例,6个路口对应6组红绿灯,并且路口还分有主路与辅路,即使是真人司机也很难保证不走错。

对此,MANA给出的解决方案是,采用毫末独创的“双流”感知模型,分两步并同步处理红绿灯识别与路口绑路,保证识别正确率与识别速度。
首先是红绿灯识别问题。针对红绿灯的不同形态与运行逻辑,MANA首先会从车主真实数据中进行红绿灯部分的筛选,并且也会在仿真系统中吸取经过验证的仿真数据。
与真实数据不同,仿真数据与其在真实世界中的映射终究会存在一定差异,所以MANA在这里又引入了混合迁移学习的概念,通过将两种数据进行混合与拉齐,实现对混合数据的高效应用。
在正确识别红绿灯的同时,MANA还要确认与红绿灯对应的路口究竟是哪一个,而这正是Transformer的优势领域。
通过Transformer的全局注意力机制,MANA首先能够搭建出一张解释道路特征的Feature Map,通过其道路形状、地图导航等因素,判断红绿灯对应路口的大致位置。
之后则是将其与红绿灯识别结果进行重合,最终得出“我要去哪一条路,那条路现在是红灯还是绿灯”的结论。
当前搭载L2级驾驶辅助系统的车辆都具备车道保持的功能,但在实际使用过程中,很多车都会出现车道内左右横摆的现象,其原因之一便来源于系统对车道线的识别逻辑。
此外,城市道路中很多车道线都存在新旧重叠、磨损褪色、中断丢失、潮汐变更的问题,同样也能够对真人驾驶带来不小的迷惑,并导致辅助驾驶系统直接退出。
就像人低着头走路迟早会撞墙一样,传统驾驶辅助系统之所以会经常栽在车道线这一领域,很大原因在于其算法无法捕捉全局信息,仅能通过局部信息进行决策。
此外,融合、纠正由摄像头捕获的车道线图像,并基于这一信息进行时序输出,也是传统辅助驾驶系统难以完善的,这同样是导致很多自动驾驶企业依赖高精地图的原因。

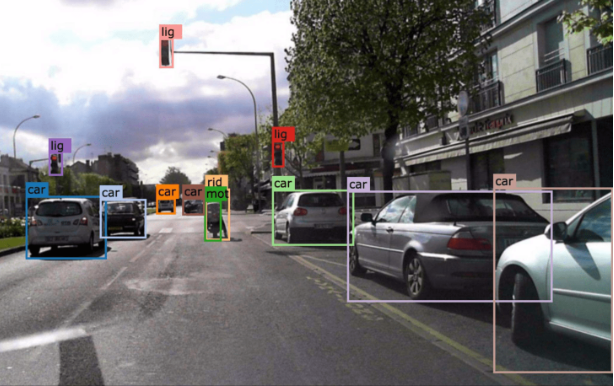
基于Transformer的全局注意力机制,MANA同样可以轻松应对这一难题。HPilot 3.0拥有6颗摄像头,视角覆盖车辆四周,而Transformer则可轻松将这6角信息进行拼接,并在这一过程中消除传感器本身存在的标定误差,拼接出连贯、真实的车道线。
此外,基于Transformer全局建模的能力也能让MANA看得更远,即使车道线出现磨损、丢失、位移等情况,MANA也能建立更准确的道路拓扑与时序结构,提升系统鲁棒性。

毫末智行的“重感知”方案为自动驾驶的发展带了全新的认知,但并不意味着毫末智行要彻底放弃高精地图。根据2022 HAOMO AI DAY提供的信息,毫末智行城市NOH的路口通过率超过70%,变道成功率超过90%,交通流处理能力高达4级,并将在今年落地,但得益于“重感知”路线,城市NOH将是国内第一个实现大规模量产的城市辅助驾驶产品,也将是国内第一个最实用高效的城市辅助驾驶产品。
“重感知”趋势下,自动驾驶开始“拼内功”
不论业界对“重感知”评价如何,在以特斯拉、华为、毫末智行为代表的头部自动驾驶企业的集体转型下,自动驾驶未来将发展如何,已经一目了然了——视觉感知将是自动驾驶企业建立优势地位的护城河,也将是实现自动驾驶的核心要义。
于自动驾驶而言,高精地图、激光雷达就如兵器之于习武者,即使属性再好,也终究是身外之物、不可过于依赖,何况好的兵器更需要好的内功驱动;而视觉感知之于习武者,则是真正内功的体现。习武者修炼好的内功,不仅可以做到神形合一,也可以驾驭外界各种兵器,做到强强联合、以一敌百。
在第一性原理的启迪下,毫末智行在激进的纯视觉路线和保守的融合感知路线中正在探索一条更具优势的技术赛道,这为自动驾驶技术发展提供了一份非常好的参考模板。当然,这也给自动驾驶下半场的群雄角逐提供了更多看点。