译者 | 李睿
审校 | 孙淑娟
在开发机器人时,系统集成往往占用了大部分的项目资源,这比开发最终应用程序还要重要。随着低端工业协作机器人的出现,出现了只专注于开发在现有硬件上运行的软件开发商。然而,机器人的硬件和软件能力之间存在着一个至关重要的关系。需要保留对计算硬件的设计控制,以创建更专业、更节能、安全和高性能的机器人。

硬件挑战和软件技能
如果机器人专家希望交付未来需要的更好、更快的机器人,就必须克服硬件面临的障碍。在后摩尔时代的计算世界中,升级硬件以采用最新一代微处理器无法实现所需的应用程序性能升级。其前进的道路不再在于等待最新的芯片。硬件加速通常是获得必要收益的唯一途径。
这种硬件挑战使机器人等学科的开发人员的工作变得更加复杂,他们的技能往往偏向于开发软件。这意味着如果他们要满足市场对新型工业机器人的需求,就必须面对设计自适应计算硬件的前景。在生产线和仓库等领域使用机器人来提高生产力的企业,正在寻找能够提供额外灵活性、更精细的位置控制、卓越的基于视觉的能力、改进的数据捕获和更低功耗的设备。
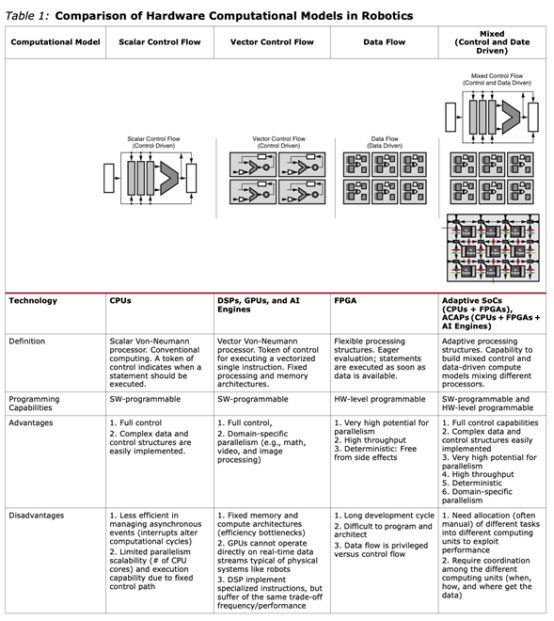
机器人硬件加速的主要原理是,与传统的控制驱动方法不同,用于软件开发的混合控制和数据驱动方法允许团队设计自定义计算架构,为应用程序分配最佳数量的硬件资源。
就实现而言,需要异构计算模型。这利用了CPU和GPU的优势,它们在控制流计算方面表现出色,同时利用FPGA的优势来处理数据流计算。这种方法同时提供了对CPU/GPU的灵活性和完全控制,以实现复杂的计算,具有低功耗、高性能、低延迟和硬件加速的确定性。现在,各种供应商都在提供自适应片上系统(SoC)和系统级模块(SOM)设备,例如AMD-Xilinx Kria™SOM及其相关的Kria机器人堆栈,它们提供了这种混合计算模型的优势.该表比较了这些不同的模型。
自适应片上系统(SoC)和系统级模块(SOM)允许机器人专家通过对创建正确数据路径和控制机制的架构进行编程来构建机器行为。然而,需要复杂的工程技能来使用既定的工具和技术对此类架构进行编程。
机器人专家缺乏合适的硬件和嵌入式设计专业知识,他们习惯于以计算图的形式构建行为,以解决当前的机器人任务。他们经常使用C++通过高级软件工程实践来创建复杂的实时确定性系统。
建立在机器人操作系统(ROS)之上
现在需要一种不同的方法来帮助机器人专家利用可用的硬件加速技术。在理想情况下,这种方法应该让他们在熟悉的开发环境(例如ROS)中创建自定义硬件,并使用熟悉的工具(例如Gazebo)进行模拟。
ROS是机器人应用程序开发的事实上的行业标准,自从2020年ROS2问世以来更是如此。这已成为跨行业机器人应用程序的默认软件开发工具包(SDK),许多团体现在都在使用ROS和Gazebo。
以前将自适应计算集成到ROS中的举措已经从硬件工程师的角度解决了这一挑战。他们假设用户以前有嵌入式和硬件流程方面的经验,因此熟悉RTL、HDL和HLS等概念以及用于操作它们的设计工具。同样,部署到嵌入式目标需要对Yocto、OpenEmbedded和相关工具有一定的了解。
了解大多数机器人专家并非来自这一背景,ROS2硬件加速工作组(HAWG)正在采用以ROS为中心的方法,将嵌入式流程直接集成到ROS生态系统中。它的目标是提供类似于机器人专家在桌面工作站中构建ROS工作区时所享受的体验。
HAWG的工作建立在已发表的关于优化ROS计算图以利用自适应计算的研究,以及在可编程逻辑中加速部分图的工具和方法的建议之上。除此之外,HAWG现在正在提出一种架构(如下图所示),该架构专注于C++和OpenCL等熟悉的语言。
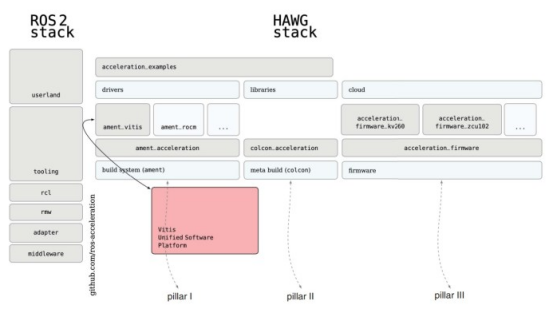
ROS 2和HAWG堆栈一起促进了硬件加速
所提出的架构与平台无关,因此适用于边缘设施、工作站、数据中心或云计算平台,而且与技术无关,以允许针对FPGA、CPU和GPU以及易于移植到各种模块和主板。
最终,这项工作应该使大多数机器人专家能够利用硬件加速的机会来实现下一代先进和复杂的机器人。
原文标题:Simplifying hardware acceleration for robots with ROS 2,作者:Ben Dickson