














现在来写 I2C Driver 部分。
I2C driver 分四个部分来写:
I2C SW Architecture
I2C Data Structure
I2C Register Flow
I2C Data Transfer- 1.
- 2.
- 3.
- 4.
文章以 MTK 平台为例,code 来源于小米开源项目,小米每做一个手机项目,都会将 kernel 部分开源,因为必须遵循 GPL 协议。
https://github.com/MiCode/Xiaomi_Kernel_OpenSource- 1.
I2C driver 源码目录。
/kernel-5.10/drivers/i2c/i2c-core-base.c //Linux common 驱动
/kernel-5.10/drivers/i2c/i2c-core.h
/kernel-5.10/include/linux/i2c.h
/kernel-5.10/drivers/i2c/busses/i2c-mt65xx.c //i2c 控制器驱动
/kernel-5.10/arch/arm64/boot/dts/
demo
/kernel-5.10/drivers/input/touchscreen/- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
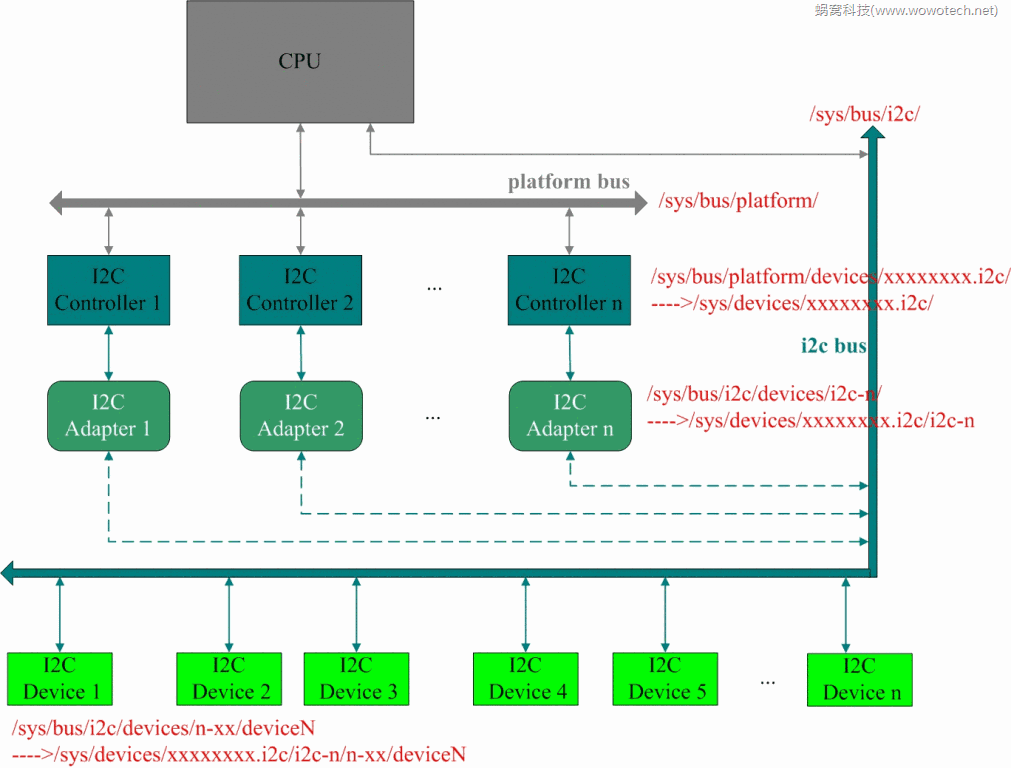
1、I2C SW Architecture

【driver 驱动层】由普通驱动工程师负责,【i2c 核心层】由 Linux 提供,【i2c 核心层】以下由芯片原厂负责。
I2C 子系统通过 i2c-core 将 i2c 设备驱动和 i2c 总线驱动进行了分离,从而使得 i2c 设备驱动中不用关心 i2c 总线传输细节,专注于 i2c 设备逻辑的实现。
抽象如下:


I2C 总线驱动重点是 I2C 适配器(控制器)驱动,这里用到两个重要的数据结构:i2c_adapter 和 i2c_algorithm。其中,Linux 内核将 SOC 的 I2C 适配器(控制器)抽象成 i2c_adapter,i2c_algorithm 只是一些 i2c 传输的实现函数合集。
在 Linux 系统中有如下节点:
2、I2C Data Structure
我们要搞懂一个 Linux 子系统,必须研究它的数据结构,搞懂每个结构体存储了什么东西,才能梳理清楚该子系统的架构。
I2C 子系统有几个主要的结构体:
I2C 控制器:i2c_adapter、i2c_algorithm、mtk_i2c
I2C 设备驱动:i2c_client、i2c_driver
I2C 传输:i2c_msg- 1.
- 2.
- 3.
i2c_adapter:i2c-core 层描述一个 I2C 控制器,假如一个芯片有 8 路 I2C bus,则有 8 个 i2c_adapter。请详细看博主对 code 的注释说明。
struct i2c_adapter {
struct module *owner;
unsigned int class; /* 该 I2C bus 支持哪些类型的从设备 */
const struct i2c_algorithm *algo; /* the algorithm to access the bus */
void *algo_data;
/* data fields that are valid for all devices */
const struct i2c_lock_operations *lock_ops;
struct rt_mutex bus_lock;
struct rt_mutex mux_lock;
int timeout;/* 超过该时间无法重发 */
int retries;/* I2C发送失败重试次数 */
struct device dev; /* the adapter device */
unsigned long locked_flags; /* owned by the I2C core */
#define I2C_ALF_IS_SUSPENDED 0
#define I2C_ALF_SUSPEND_REPORTED 1
int nr;/*I2C bus id*/
char name[48];
struct completion dev_released;
struct mutex userspace_clients_lock;
struct list_head userspace_clients;
struct i2c_bus_recovery_info *bus_recovery_info;
const struct i2c_adapter_quirks *quirks;
struct irq_domain *host_notify_domain;
struct regulator *bus_regulator;
};- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
- 25.
i2c_algorithm:I2C 传输函数合集,其中 master_xfer 是真正的传输函数,芯片原厂写 I2C 控制器驱动时必须实现。functionality 函数会返回该 I2C 控制器支持什么通信协议,也需要实现,其他的函数即便 Linux 规定了,芯片原厂也可以不实现,因为不常用。
struct i2c_algorithm {
int (*master_xfer)(struct i2c_adapter *adap, struct i2c_msg *msgs,int num);
int (*master_xfer_atomic)(struct i2c_adapter *adap,struct i2c_msg *msgs, int num);
int (*smbus_xfer)(struct i2c_adapter *adap, u16 addr,unsigned short flags, char read_write,u8 command, int size, union i2c_smbus_data *data);
int (*smbus_xfer_atomic)(struct i2c_adapter *adap, u16 addr,unsigned short flags, char read_write,u8 command, int size, union i2c_smbus_data *data);
/* To determine what the adapter supports */
u32 (*functionality)(struct i2c_adapter *adap);
#if IS_ENABLED(CONFIG_I2C_SLAVE)
int (*reg_slave)(struct i2c_client *client);
int (*unreg_slave)(struct i2c_client *client);
#endif
};- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
MTK 只实现了其中两个。


i2c_client:描述设备信息:
struct i2c_client {
unsigned short flags;/* I2C 传输标志位如下*/
#define I2C_CLIENT_PEC 0x04 /* Use Packet Error Checking */
#define I2C_CLIENT_TEN 0x10 /* we have a ten bit chip address */
/* Must equal I2C_M_TEN below */
#define I2C_CLIENT_SLAVE 0x20 /* we are the slave */
#define I2C_CLIENT_HOST_NOTIFY 0x40 /* We want to use I2C host notify */
#define I2C_CLIENT_WAKE 0x80 /* for board_info; true iff can wake */
#define I2C_CLIENT_SCCB 0x9000 /* Use Omnivision SCCB protocol */
/* Must match I2C_M_STOP|IGNORE_NAK */
unsigned short addr; /* chip address - NOTE: 7bit */
/* addresses are stored in the */
/* _LOWER_ 7 bits */
char name[I2C_NAME_SIZE];
struct i2c_adapter *adapter;/* 所处的那一路 I2C bus */
struct device dev; /* the device structure */
int init_irq; /* irq set at initialization */
int irq; /* irq issued by device */
struct list_head detected;
#if IS_ENABLED(CONFIG_I2C_SLAVE)
i2c_slave_cb_t slave_cb; /* callback for slave mode */
#endif
void *devres_group_id; /* ID of probe devres group */
};- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
i2c_driver:普通驱动工程师写驱动时,必须实现其中的 probe 函数和 remove 函数,其余的函数一般用不到。
struct i2c_driver {
unsigned int class;
/* Standard driver model interfaces */
int (*probe)(struct i2c_client *client, const struct i2c_device_id *id);
int (*remove)(struct i2c_client *client);
int (*probe_new)(struct i2c_client *client);
void (*shutdown)(struct i2c_client *client);
void (*alert)(struct i2c_client *client, enum i2c_alert_protocol protocol,unsigned int data);
int (*command)(struct i2c_client *client, unsigned int cmd, void *arg);
struct device_driver driver;
const struct i2c_device_id *id_table;
int (*detect)(struct i2c_client *client, struct i2c_board_info *info);
const unsigned short *address_list;
struct list_head clients;
};- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
mtk_i2c:MTK 平台用该结构体表示 I2C 控制器,定义在/kernel-5.10/drivers/i2c/busses/i2c-mt65xx.c。
struct mtk_i2c {
struct i2c_adapter adap; /* i2c host adapter */
struct device *dev;
struct completion msg_complete;
/* set in i2c probe */
void __iomem *base; /* i2c base addr */
void __iomem *pdmabase; /* dma base address*/
struct clk *clk_main; /* main clock for i2c bus */
struct clk *clk_dma; /* DMA clock for i2c via DMA */
struct clk *clk_pmic; /* PMIC clock for i2c from PMIC */
bool have_pmic; /* can use i2c pins from PMIC */
bool use_push_pull; /* IO config push-pull mode */
u16 irq_stat; /* interrupt status */
unsigned int clk_src_div;
unsigned int speed_hz; /* The speed in transfer */
enum mtk_trans_op op;
u16 timing_reg;
u16 high_speed_reg;
unsigned char auto_restart;
bool ignore_restart_irq;
const struct mtk_i2c_compatible *dev_comp;
};- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
i2c_msg:I2C 读写时,必须填充 i2c_msg。
标志位:写为 0 ,读为 I2C_M_RD,其他的 flag 大家可以参考。
I2C 单笔传输最大 64KB,len 的长度博主在注释中有说明。
struct i2c_msg {
__u16 addr;
__u16 flags;
#define I2C_M_RD 0x0001 /* guaranteed to be 0x0001! */
#define I2C_M_TEN 0x0010 /* use only if I2C_FUNC_10BIT_ADDR */
#define I2C_M_DMA_SAFE 0x0200 /* use only in kernel space */
#define I2C_M_RECV_LEN 0x0400 /* use only if I2C_FUNC_SMBUS_READ_BLOCK_DATA */
#define I2C_M_NO_RD_ACK 0x0800 /* use only if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_IGNORE_NAK 0x1000 /* use only if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_REV_DIR_ADDR 0x2000 /* use only if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_NOSTART 0x4000 /* use only if I2C_FUNC_NOSTART */
#define I2C_M_STOP 0x8000 /* use only if I2C_FUNC_PROTOCOL_MANGLING */
__u16 len;//无符号16位,65536个byte,一次 I2C 传输最大 64KB
__u8 *buf;
};
I2C_M_NO_RD_ACK:忽略所有 ACK/NACK 一直读
I2C_M_IGNORE_NAK:忽略所有的 NACK 继续读
I2C_M_NOSTART:没有 START 信号- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.






















