大数据文摘出品
作者:Caleb
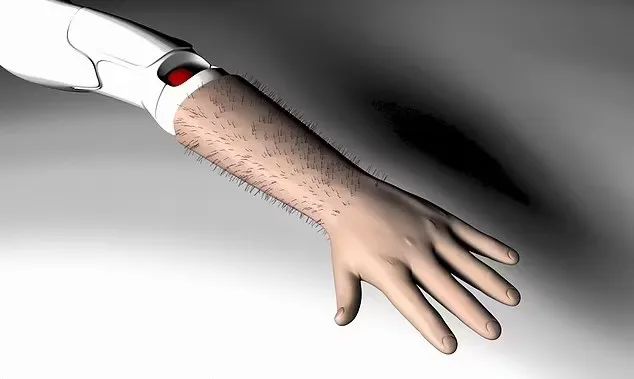
机器人见多了,你见过这种吗?
带有电子毛发,可以感知甚至预测触摸方向。
是的,就像人类一样。
虽然有点“黑科技”,但是开姆尼茨理工大学纳米电子材料系统教授、材料、结构和纳米膜集成研究中心(MAIN)科学主任Oliver G. Schmidt教授领导的研究团队已经探索出了一种新的途径来开发极其敏感和方向相关的3D磁场传感器,该传感器可以集成到电子皮肤系统(有源矩阵)中。
该团队使用了一种全新的方法来实现3D设备阵列的小型化和集成,并朝着模仿人类皮肤的自然触感迈出了重要一步。
MAIN施密特教授研究小组的博士生、该研究的第一作者Christian Becker说:“我们的方法允许在3D中精确的空间布置功能传感器元件,可以在并行制造过程中大规模生产。这样的传感器系统很难通过已建立的微电子制造方法生成。”
相关研究登上了最新一期的Nature Communications杂志。

论文链接:https://www.nature.com/articles/s41467-022-29802-7
折纸技术将3D传感器与微电子电路集成
研究团队提出的传感器系统的核心是所谓的各向异性磁阻(AMR)传感器。
AMR传感器主要用于精确确定磁场的变化,目前多用于汽车中的速度传感器,或确定各种机器中运动部件的位置和角度。
为了开发高度紧凑的传感器系统,研究人员利用了所谓的“微型折纸工艺”(micro-origami process)。该过程用于将AMR传感器组件折叠成三维架构,可以解析三维的磁场矢量场。微型折纸允许大量微电子元件安装在狭小的空间中,并将它们排列成任何传统微加工技术都无法实现的几何形状。
“微型折纸工艺开发于20多年前,很高兴看到这种技术的全部潜力现在可以用于新型微电子应用。”Oliver G. Schmidt教授感叹到。
研究团队将3D微型折纸磁传感器阵列集成到单个有源矩阵中,其中每个单独的传感器都可以通过微电子电路方便地寻址和读取。
“有源矩阵磁传感器与自组装微型折纸架构的结合是一种全新的方法,可将高分辨率3D传感系统小型化和集成。”Daniil Karnaushenko博士表示,他对项目中的概念、设计和实施都做出了决定性贡献。
微小的毛发实时预测和感知触摸方向
据了解,该研究团队已成功地将带有磁根细毛的3D磁场传感器集成到人造电子皮肤中。
电子皮肤由弹性材料制成,其中嵌入了电子设备和传感器,这类似于与神经交织的有机皮肤。
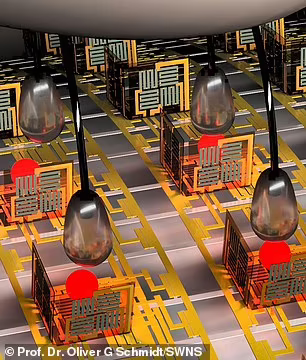
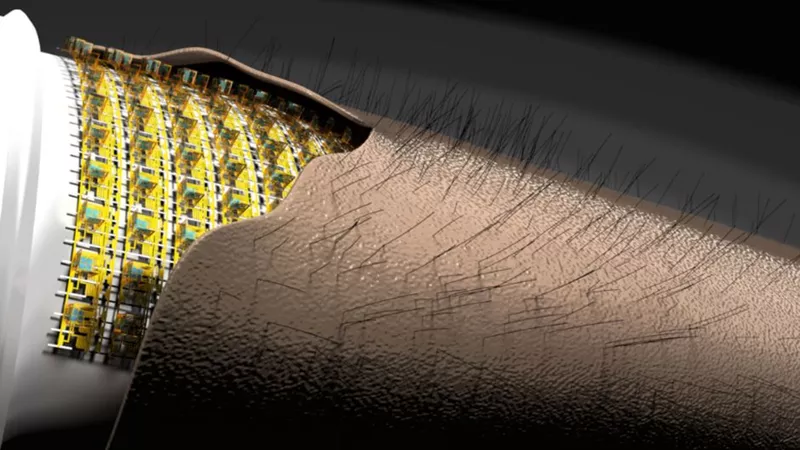
当头发被触摸和弯曲时,底层的3D磁传感器可以检测到磁根的运动和确切位置。也就是说,传感器矩阵不仅能够记录头发的裸露运动,还可以确定运动的确切方向。与真实的人类皮肤一样,电子皮肤上的每一根头发都成为一个完整的传感器单元,可以感知和检测附近的变化。
3D磁传感器与磁发根之间的实时磁机耦合通过电子皮肤系统提供了一种新型的触敏感知。当人类和机器人紧密合作时,这种能力非常重要。例如,机器人可以在有意接触或意外碰撞即将发生之前,提前感知与人类同伴的交互,并提供许多细节。
机器人的拟人化
近年来,机器人的拟人化逐渐成为新的发展趋势。
比如英国Engineered Arts团队去年推出的机器人Ameca,团队称之为“机器人技术的未来一面”,代表了人类机器人技术的最高水准。
看看这宛如CG特效一样的动作表情,难怪不少网友都想到了恐怖谷效应。
据了解,机器人的硬件和软件都是模块化运行的,很容易进行升级迭代,也可以独立运行,也就是说,有时候我们甚至不需要一个完整的机器人,可以只控制头部,或者手臂,就能完成需求。
项目组介绍,AI目前通常还只是代码层面的内容,不像栩栩如生的机器人成品那样能体现出戏剧性。但在软件层面,有了AI程序和硬件层面的仿真表情技术积累,Ameca可以与任何人建立即时的融洽关系。
目前Ameca的全套运动设备还仅限于上半身,下半身仍在开发中。
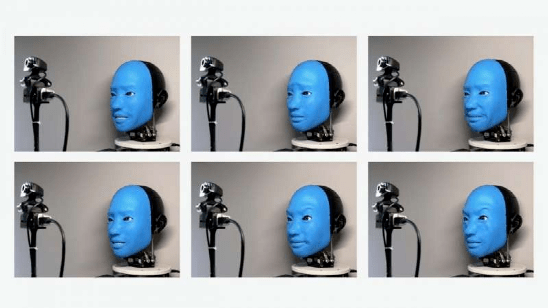
除此之外,2021年,美国的创意机器实验室(CreativeMachines Lab At Columbia Engineering)发表了关于EVA机器人的研究。这种新型机器人拥有一张柔软而富有表现力的脸,可以对微笑等表情做出回应。
据了解,团队使用了3D打印来制造零件,这些精准复杂的零件与EVA的头骨无缝结合在一起。经过数周调试,EVA可以做出微笑、皱眉或是看起来心烦意乱的表情,这些表情具有一定真实性。随后,研究人员开始指导EVA使用人工智能对面部运动进行编程,通过“观看”表情类视频,通过人工智能“阅读”他人表情,然后反映在自己“脸”上。
就像这样:
1970年,描绘人类对机器人和非人类物体感觉的恐怖谷效应问世。该理论指出,如果一个实体“不够拟人”,那它的类人特征 (如毛绒娃娃的脸部)就会显眼并且容易辨认,容易获得人类的好感。相反,如果一个实体“足够拟人”,那它的非类人特征就会成为显眼的部分,在人类观察者眼中产生一种古怪的感觉。
如今,随着科技的进步,基于恐怖谷效应,在比人型机器人更加拟真的领域,一些研究成果都会被划入恐怖谷的底端,给人那种毛骨悚然的感觉。
但或许未来某天,恐怖谷效应会随着技术的开发而被超越,对此我们拭目以待。
相关报道:
- https://www.theengineer.co.uk/content/other/artificial-hairs-provide-added-sensitivity-to-e-skin
- https://www.dailymail.co.uk/sciencetech/article-10781647/Scientists-developing-robot-electronic-HAIRS-mimic-natural-touch-human-skin.html