1、前言
本人是一个普通的中年程序员,并不是圈内的大牛,写嵌入式操作系统这一系列的文章并不是要显示自己的技术,而是出于对嵌入式的热爱。非常幸运,本人毕业后的十几年一直从事嵌入式行业,遇到过各种坑,也收获过各种喜悦。希望嵌入式操作系统系列文章能对其它的嵌入式爱好者能有所帮助,帮助热爱嵌入式行业的朋友快速了解嵌入式操作系统的运行原理。
我将一步一步地完善我们的嵌入式实时操作系统enuo,每完成一步软件的构建,我将输出一篇总结性的文件,来分享软件构建过程,并开源软件工程和源码。
操作系统enuo的名字来源于我5岁儿子的伊诺,希望在我的守护下enuo和伊诺都能健康快乐,茁壮成长!
2、设计背景
书接上文我们完成了一个可以实现任务切换的软件工程V0.01版本。V0.01版本的软件工程中包含:main.c ,startup_ stm32f401xc.s 和 readme三个文件。startup_ stm32f401xc.s 文件为STM32F401的启动文件,main.c文件实现任务初始化,任务切换和任务轮询调度功能,readme文件用于记录版本修改日志。
V0.01版只能算一个功能验证型软件,接下来需要使用正规的软件设计方法来改造和重构整个工程,使软件系统具有较高的扩展性,移植性,复用性和可读性。
3、设计目标
首先运用软件设计五大原则中的单一原则,建立一个独立的文件夹enuo用于存放于操作系统相关的源文件,每个源文件完成一个单一的功能。使用“分而治之”的设计思维,并将操作系统分为多个功能单一的模块,每个模块以一个C文件的形式承载,这样就提高了软件的可读性和移植性。
其次同时使用面向对象的设计思维,将任务设计为一个抽象的对象,任务对象将任务的信息封装起来,这样就提高了软件的扩展性和复用性。虽然C语言不是面向对象编程语言,但是通过一些设计技巧可以实现面向对象设计。
最后构建一个任务链表用于加入和删除任务。链表数据结构可以在保留原有物理顺序的情况下,高效地插入和删除。
4、设计环境
硬件环境是使用STM32F401RE为核心的自制开发板。
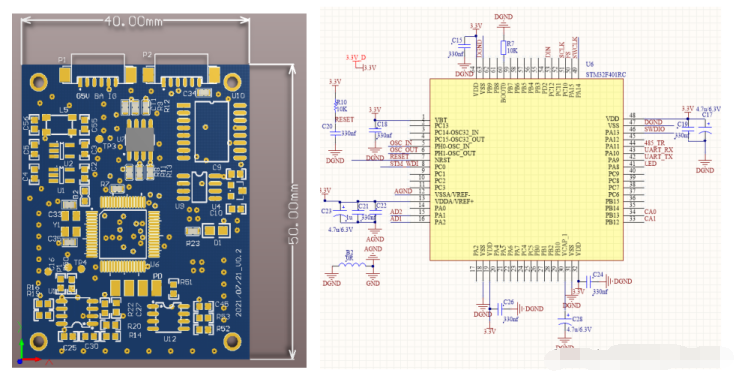
软件环境是使用的KEIL V5.2 开发工具。
5、设计过程
(1)构建任务对象
任务对象包含一个栈指针和一个任务链表,其定义如下:
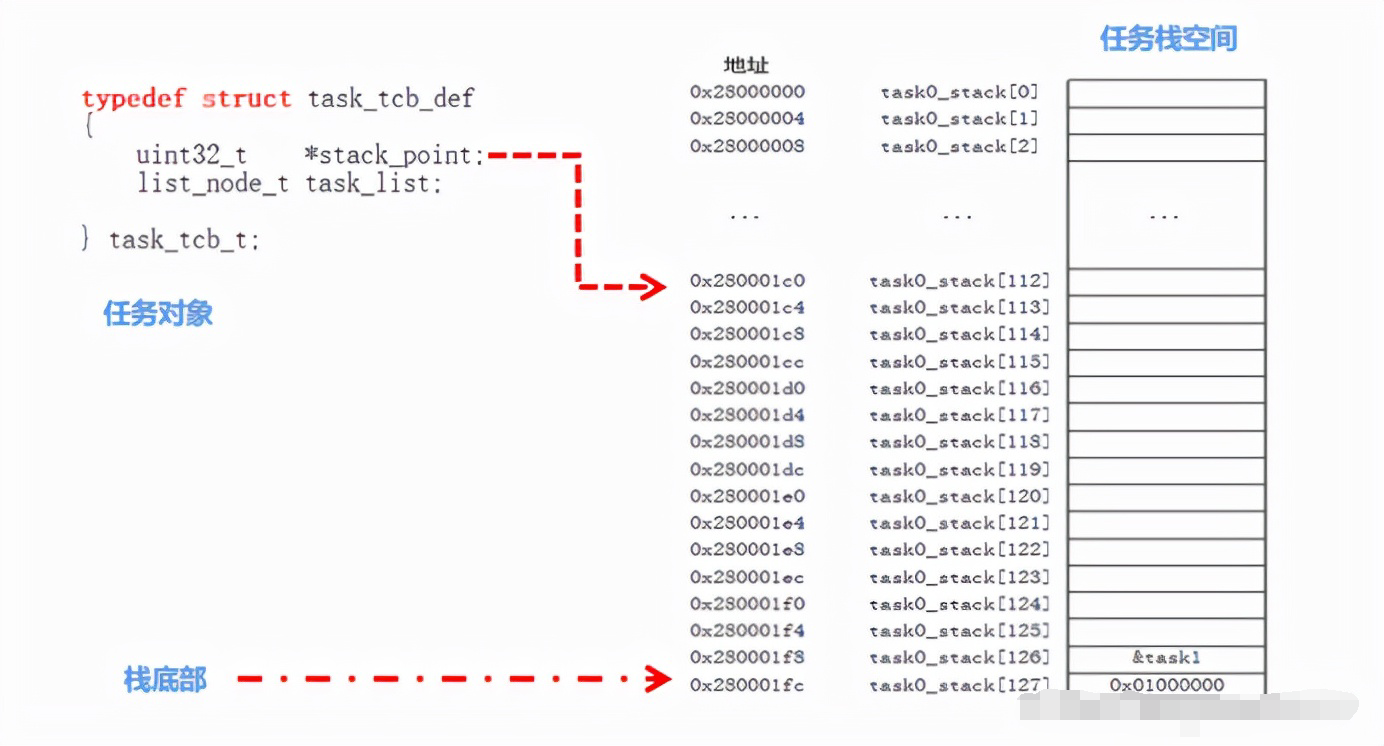
任务栈指针为第一个元素,这样栈指针就和任务对象为同一个地址(结构体的第一个元素就是结构体的首地址),这样就可以极大的简化任务切换过程中对栈指针的操作。
任务栈指针指向用户为任务定义的静态数据块,通常情况下任务栈是一个全局静态数组,数组的大小就是任务栈的大小。
任务链表的作用是将多个任务串联起来,方便依次检索和操作。
(2)构建链表结构
我们使用链表结构来存放任务对象,使用链表结构有如下优势:
1、在保留原有物理顺序的情况下,插入和删除速度快,效率高。插入和删除只需要改变几个指针变量。
2、链表中的表项数量没有上限。存储的表项上限只与内存空间大小有关,理论上如果内存无限大,链表中的表项可以动态增加到无限个。
3、动态分配内存,需要用多少个表项,就分配几个表项,不需要预先分配内存,不存在内存浪费的情况。
链表结构定义如下:
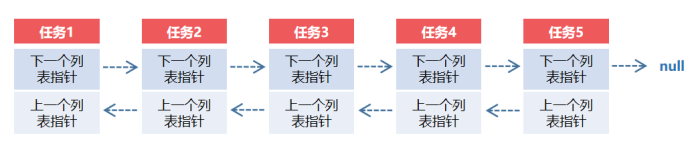
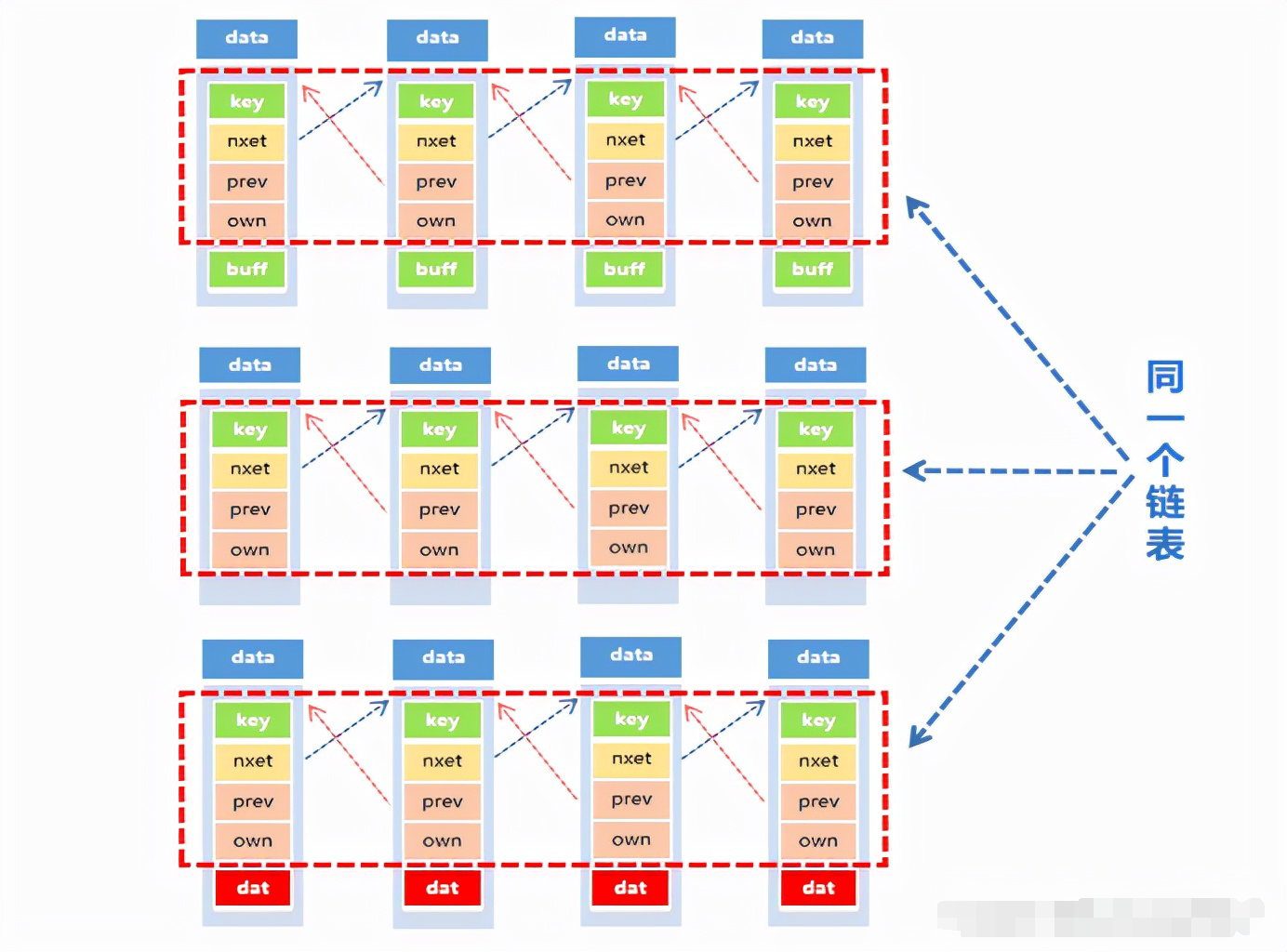
链表采用的是数据中包含链表的数据结构,采用这种方式的优点是:当用户数据结构改变时,整个链表结构可以保持不变,不同的用户数据可以通用这一个的链表结构。示意图如下:
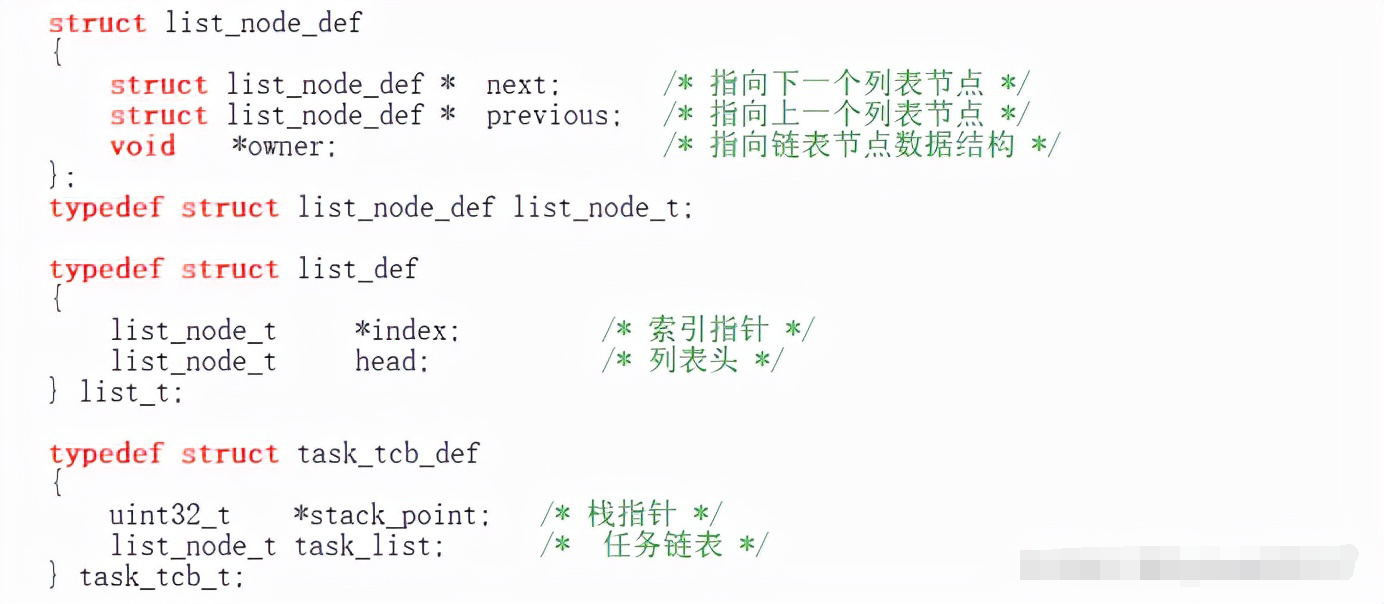
数据中包含链表的数据结构,在操作链表后无法得到整个数据对象的地址。由下图可知图可知我们通过next指针可以得到下一个list元素的地址,但是我们无法获取整个数据对象的地址。
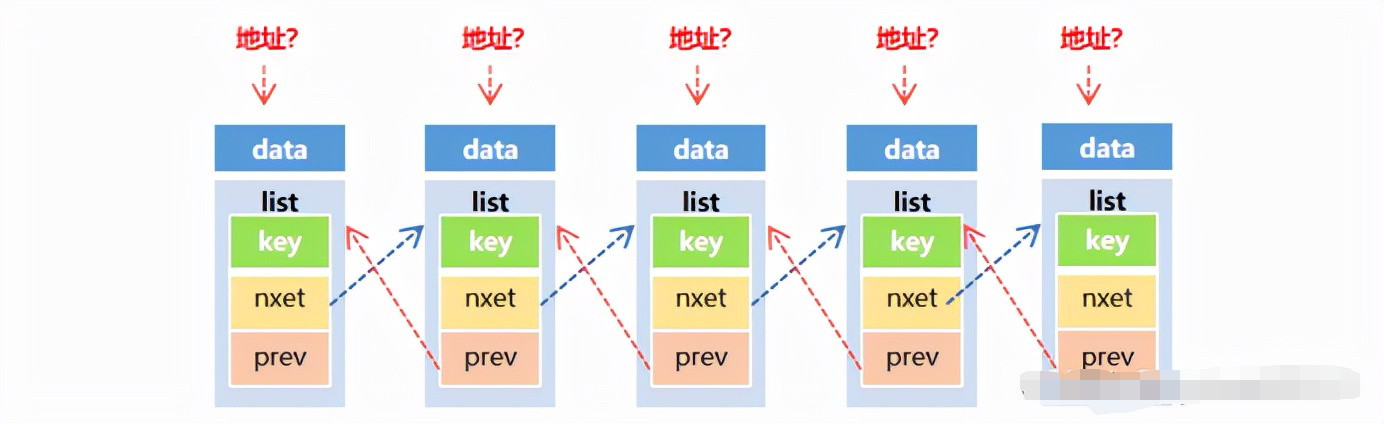
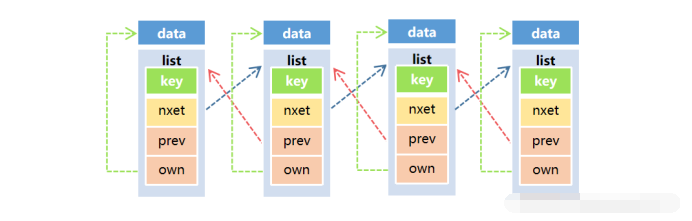
在链表结构中增加一个void * owner指针,void * 类型指针可以指向任意类型的对象,用这个指针指向整个数据对象的地址,这样就可以定位到整个数据对象的地址。
struct list_node_def
{
struct list_node_def * next; /* 指向下一个列表节点 */
struct list_node_def * previous; /* 指向上一个列表节点 */
void *owner; /* 指向链表节点数据结构 */
};
哨兵机制(表头机制)
哨兵是一个哑对象,作用是简化边界条件处理。使用哨兵机制(表头机制)后链表在空状态和非空状态插入和删除对象的操作是相同的,这样可以使得代码紧凑,清晰。
typedef struct list_def
{
list_node_t *index; /* 索引指针 */
list_node_t head; /* 列表头 */
} list_t;
(3)任务初始化
任务初始化代码如下:

在创建任务之前,需要定义任务栈空间和用户任务函数:
/*********************************************************************************************************
* @名称 : enuo
* @作者 : 李巍
**********************************************************************************************************/
#define STACK_NUM (64)
/* 任务0-任务2栈空间 */
uint32_t task0_stack[STACK_NUM];
uint32_t task1_stack[STACK_NUM];
uint32_t task2_stack[STACK_NUM];
/* 任务0-任务2对象*/
task_tcb_t my_task0;
task_tcb_t my_task1;
task_tcb_t my_task2;
void task0(void)
{
static uint16_t clk = 0;
while(1)
{
if( ( ( clk++ )%9999 ) == 0 )
{
task_debug_num0++; /* 测试跟踪 */
test_function();
}
}
}
task_create函数代码如下:
void task_create(task_tcb_t *task , task_function_t function ,uint32_t *stack_space ,uint32_t stack_number)
{
list_node_t * node_tail = &task_list.head;
/* 寻求列表尾端 */
while( node_tail->next != NULL )
node_tail = node_tail->next;
/* 任务列表加入下一个任务 */
node_tail->next = &task->task_list;
/* 列表所有者指针指向任务 */
task->task_list.owner = task;
/* 当前任务下个列表指针设置为空 */
task->task_list.next = NULL;
/* 初始化任务栈 */
task_stack_init( (uint32_t *)task, function , stack_space , stack_number );
}
task_create函数完成任务链表操作,初始化任务栈指针和任务栈空间。
task_stack_init代码如下:
void task_stack_init(uint32_t *stack_pointer ,
task_function_t task ,
uint32_t *stack_space ,
uint32_t stack_number)
{
/* 将任务psp栈指针指向任务栈底部*/
*stack_pointer = ( (uint32_t)stack_space + ( (stack_number - 16)<<2 ) );
/* 初始化任务栈中的程序寄存器 */
*( (uint32_t *)( (uint32_t )( *stack_pointer) + (14<<2) ) ) = ( uint32_t )task;
/* 初始化任务栈中的XPSR*/
*( (uint32_t *)( (uint32_t )( *stack_pointer) + (15<<2) ) ) = 0x01000000;
}
(4)开始调度任务
完成任务创建之后,就可以开始调度任务,开始调度任务代码如下:
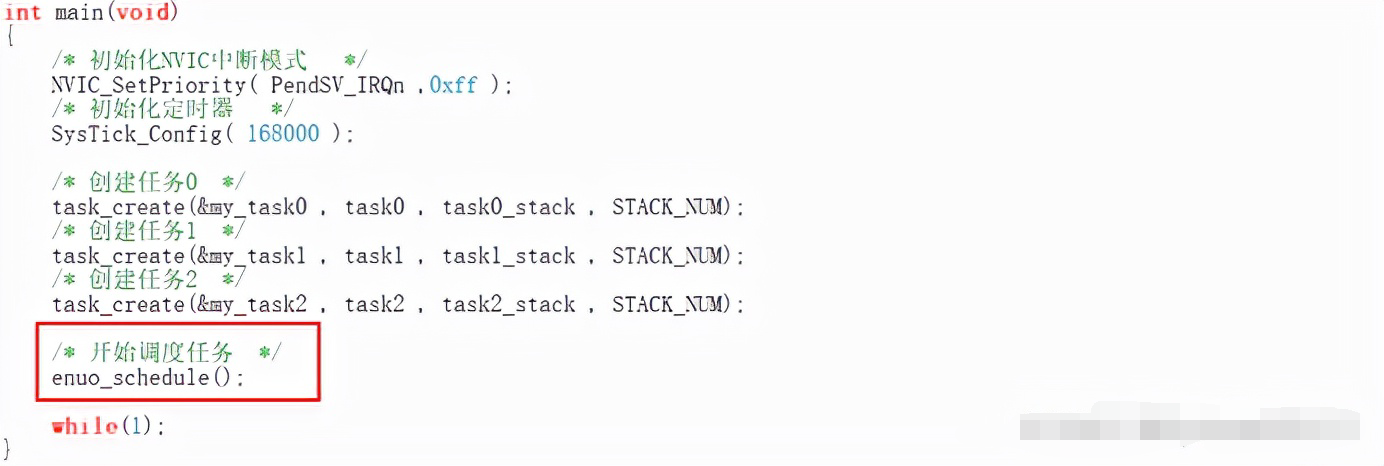
enuo_schedule函数代码如下:
/*********************************************************************************************************
* @名称 : enuo
* @作者 : 李巍
**********************************************************************************************************/
__asm void start_schedule(void)
{
/* 设置CONTROL寄存器 配置PSP栈指针模式 */
MOV R0 ,#0X02
MSR CONTROL,R0
/*读取current_task 地址 */
LDR R3, =__cpp(¤t_task)
/* 读取curr_task中的PSP指针数值 */
LDR R1,[R3]
LDR R0,[R1]
/* 出栈R4-R11八个寄存器 */
LDMIA R0!,{R4-R11}
/* 设置PSP指针 */
MSR PSP,R0
/* POP 寄存器 POP PC实现跳转 */
POP { R0-R3 , R12 ,R11 ,PC }
/* 对齐 */
ALIGN 4
}
enuo_schedule函数主要完成3个功能:
- 设置处理器栈指针模式。
- 读取current_task 地址。
- 恢复任务寄存器,POP PC实现跳转用户任务代码。
(5)调度任务方法
任务调度采用时间片轮转调度,使用SysTick定时器产生定时中断,在定时器中断函数中依次从task_list任务链表中读取任务对象,并用next_task指向新读出的任务对象,最后挂起PendSV系统中断标志位,当SysTick定时器中断函数退出时执行PendSV_Handler进行任务切换。
SysTick定时器中断函数代码如下:
/*********************************************************************************************************
* @名称 : enuo
* @作者 : 李巍
**********************************************************************************************************/
void SysTick_Handler(void)
{
static list_node_t * node_tail = &task_list.head;
/* 轮流切换任务 */
if(node_tail->next != NULL )
{
/* 当下一个列表项不为NULL时 next_task为下一个列表项指向的任务*/
next_task = node_tail->next->owner;
/* 更新任务指针 */
node_tail = node_tail->next;
}
else
{
/* 当下一个列表项为NULL时 ,node_tail指向任务列表的表头*/
node_tail = &task_list.head;
/* next_task为表头指向的下一个的任务*/
next_task = node_tail->next->owner;
node_tail = node_tail->next;
}
/* PendSV系统中断置位 */
SCB->ICSR |=SCB_ICSR_PENDSVSET_Msk;
return;
}
(6)任务切换
任务切换在PendSV_Handler异常(中断)中任务切换。PendSV_Handler函数代码如下:
/*********************************************************************************************************
* @名称 : enuo
* @作者 : 李巍
**********************************************************************************************************/
__asm void PendSV_Handler(void)
{
/* 读取当前进程栈指针数值 */
MRS R0,PSP
//isb
/* 保存R4-R11八个寄存器的值到当前任务栈中 同时将回写的地址写入R0 */
STMDB R0!,{R4-R11}
/* 读取current_task 栈指针地址 */
LDR R3, =__cpp(¤t_task)
LDR R3, [R3]
/* 将当前进程PSP指针值 写入 相应的 current_task */
STR R0,[R3]
/* 获取next_task 栈指针地址 */
LDR R4,=__cpp(&next_task)
LDR R4,[R4]
/* 读取next_task中的stack_point指针 */
LDR R0,[R4]
/* 更新current_task */
LDR R3, =__cpp(¤t_task)
STR R4,[R3]
/* 出栈 R4-R11八个寄存器 */
LDMIA R0!,{R4-R11}
/* 设置PSP指针 */
MSR PSP,R0
/* 中断返回 */
BX LR
/* 对齐 */
ALIGN 4
}
PendSV_Handler函数完成以下3个功能:
- 进入PendSV_Handler中断前处理器自动保存了R0,R1,R2,R3, R12,LR,PC,XPSR,进入中断后完成R4~R11入栈保存工作,从而实现任务保存工作。
- 读取current_task 地址将当前进程PSP指针值保存到current_task指向的任务对象中。读取next_task指向的任务对象,并加载任务对象的PSP指针值。
- 出栈 R4-R11八个寄存器,设置PSP指针。中断返回时处理器自动保存了R0,R1,R2,R3 ,R12, LR,PC,XPSR,从而实现任务恢复工作。
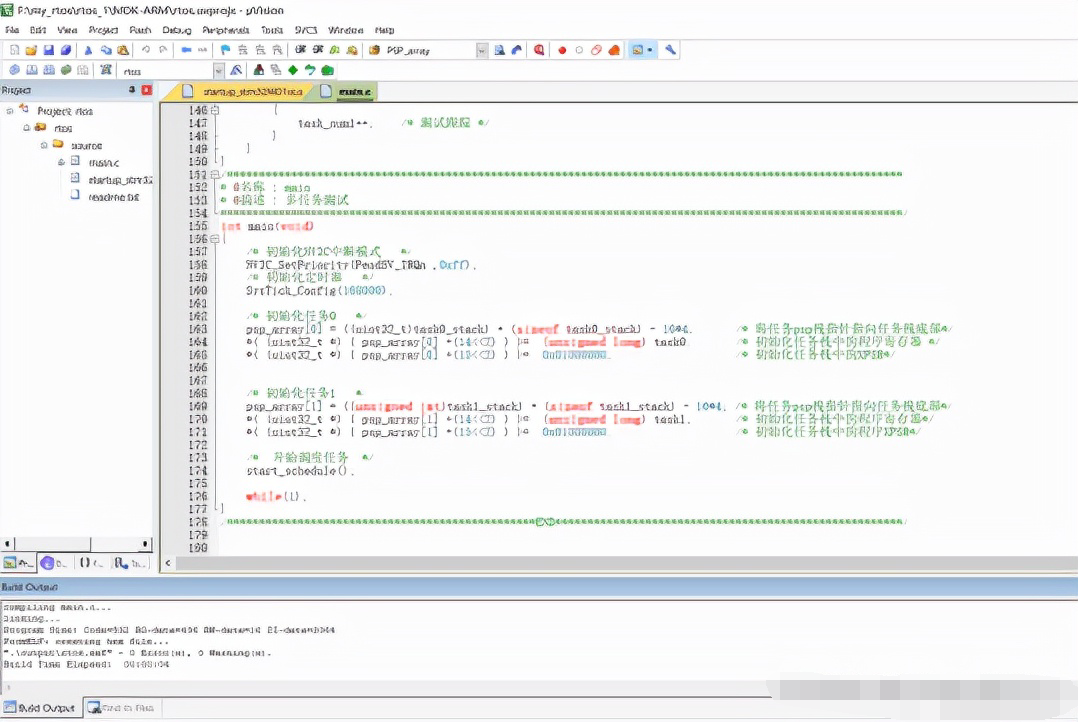
6、运行结果
代码仿真运行后的结果如下:
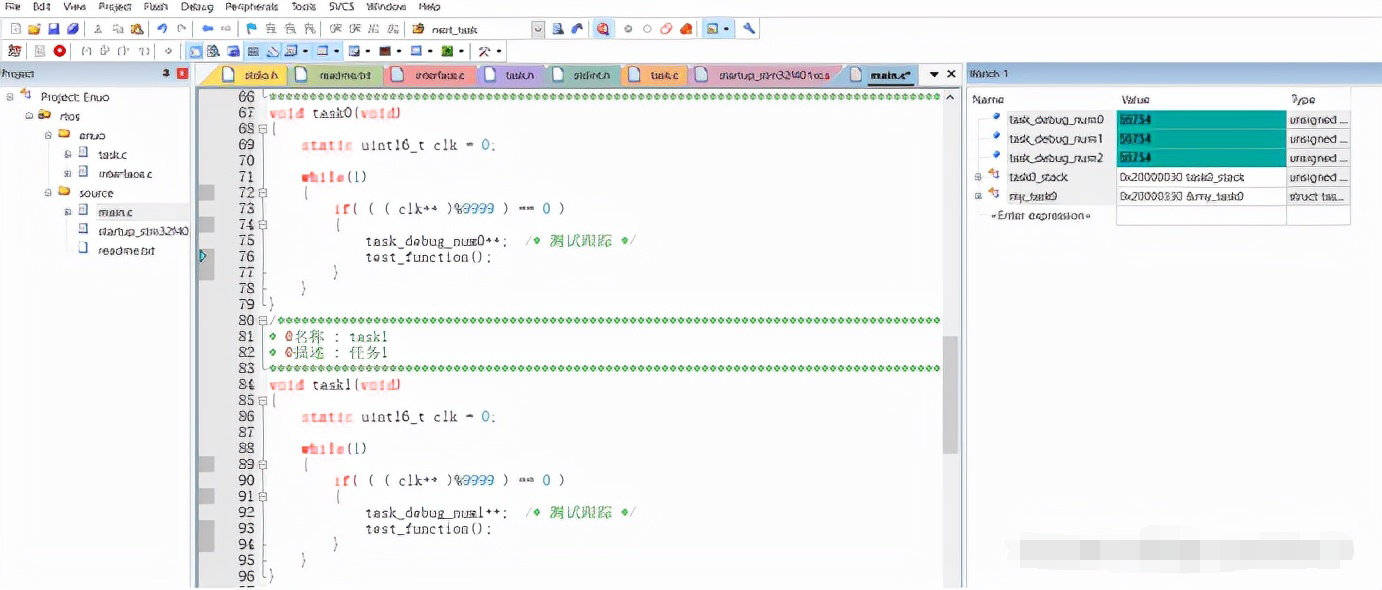
运行结果反应创建的3个任务都得到了调度,说明enuo系统正常工作。
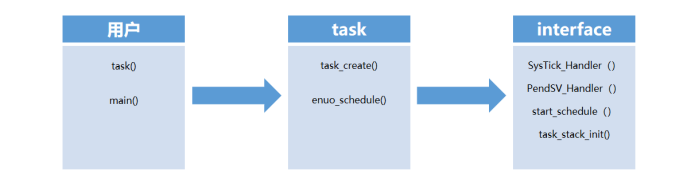
enuo系统目前包括3个文件:
(1)task.h文件
本文件中包含任务对象的定义,链表数据结构的定义和任务列表数据结构的定义。
(2)task.c文件
本文件中包含task_create和enuo_schedule两个函数。task.c文件只用于存放与任务操作相关的函数(符合单一原则)。
(3)interface.c文件
本文件中包含SysTick_Handler,PendSV_Handler,start_schedule和task_stack_init三个函数。interface.c文件只用与存放跟处理器相关的操作。后期更换处理器时只用修改这个文件即可,增强了系统的移植性。