













本文经AI新媒体量子位(公众号ID:QbitAI)授权转载,转载请联系出处。
有这么一个能溶于水的机器人,最近登上了Science子刊,还是封面:
没错,就是身上装了压力感应器,可用游戏手柄操控的正经软体机器人:
能360°转圈,也能自主推开大铁球:
但放入水中,两天左右就能完全融化:
嗯……或许是因为这个机器人是由糖、柠檬酸、甘油一类的可食用原材料3D打印而成的,咂吧一口融化后的水,可能还有点甜味儿……
而这种材料最多可重复打印5次,同时还能保持70%以上的初始性能指标。
对于每天都要产生超过10万吨科技垃圾的现代社会来说,可以说是一碗价值千金的糖水了。
可溶解的机器人
先来看看打印这样一个机器人所需的配料表:
糖浆,7克
柠檬酸,1克
甘油,9克
去离子水,4克
明胶粉,6.66克
(乍看还以为在做什么好吃的)
将糖浆加热到60°,然后将柠檬酸和甘油溶解在去离子水中,再倒入糖浆搅拌,最后加入明胶粉,让其浸泡至少24小时。
然后将上述混合物在85℃的烤箱中加热1小时15分钟,并在真空下的行星搅拌机中混合3.5分钟,得到均匀的溶液。
也就是一种特殊的生物凝胶“墨水”。
得到的这种墨水拥有300%的可拉伸性,可以进行全方位的运动,弯曲角度最高是74°,可以拉伸到原来的6倍。
柠檬酸的加入则调节了pH值以防止细菌生长,这使得这种材质在污水中也能几天之内就完全酶解。
然后先打印一个柱状物:
机器人的一个特征就是“可感知变化作出反应“,所以接下来是打印一个可拉伸的波导(Waveguide)传感器:
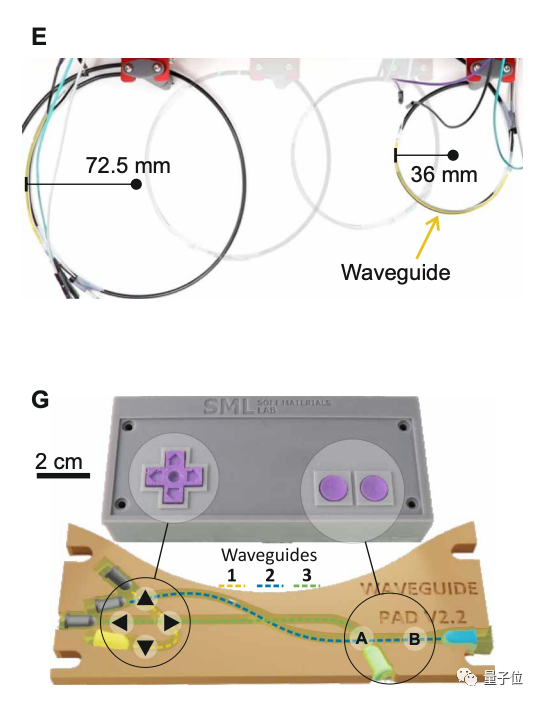
打印出来的长条看上去像一个没有包层的“数据传输线”,只不过这条线在附在上述柱状物表面后,可以准确得感知其变形情况:
通过这种高精度的传感器网络,就能实时获取执行器的弯曲状态,感知到与周围物体的接触事件的信息。
于是,当研究者们加入了一些简单的这搜索和擦拭程序时,这种材料的软体机器人就能自主地定位其周围的障碍物,并通过推动将其移除。
就像开头所展示的推走大铁球一样。
这种材料所带来的高度可重复性,更自由的弯曲程度、更高的灵敏度将使得软体机器人能更好地应用在手术工具、康复设备、抓手、行走和游泳机器上。
作者介绍
论文一作A. HEIDEN来自奥地利的约翰·开普勒林茨大学,目前为软体物质物理(Division of Soft Matter Physics)部门的一员:

论文:https://www.science.org/doi/10.1126/scirobotics.abk2119#


















