













书接上回,上回书咱们说到,操作系统通过move_to_user_mode 方法,通过伪造一个中断和中断返回,巧妙地从内核态切换到了用户态。
void main(void) {
...
move_to_user_mode();
if (!fork()) {
init();
}
for(;;) pause();
}
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
今天,本来应该再往下讲 fork。
但这个是创建新进程的过程,是一个很能体现操作系统设计的地方。
所以我们先别急着看代码,我们今天就头脑风暴一下,就是如果让你来设计整个进程调度,你会怎么搞? 别告诉我你先设计锁、设计 volatile 啥的,这都不是进程调度本身需要关心的最根本问题。
进程调度本质是什么?很简单,假如有三段代码被加载到内存中。
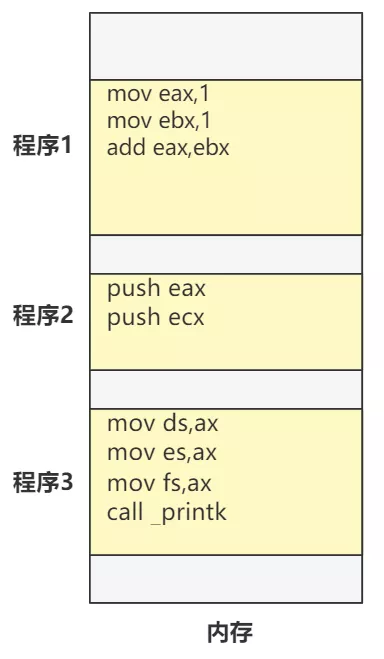
进程调度就是让 CPU 一会去程序 1 的位置处运行一段时间,一会去程序 2 的位置处运行一段时间。
嗯,就这么简单,别反驳我,接着往下看。
整体流程设计
如何做到刚刚说的,一会去这运行,一会去那运行?
第一种办法就是,程序 1 的代码里,每隔几行就写一段代码,主动放弃自己的执行权,跳转到程序 2 的地方运行。然后程序 2 也是如此。
但这种依靠程序自己的办法肯定不靠谱。 所以第二种办法就是,由一个不受任何程序控制的,第三方的不可抗力,每隔一段时间就中断一下 CPU 的运行,然后跳转到一个特殊的程序那里,这个程序通过某种方式获取到 CPU 下一个要运行的程序的地址,然后跳转过去。 这个每隔一段时间就中断 CPU 的不可抗力,就是由定时器触发的时钟中断。
不知道你是否还记得,这个定时器和时钟中断,早在 第18回 | 大名鼎鼎的进程调度就是从这里开始的 里讲的 sched_init 函数里就搞定了。
而那个特殊的程序,就是具体的进程调度函数了。 好了,整个流程就这样处理完了,那么应该设计什么样的数据结构,来支持这个流程呢?不妨假设这个结构叫 tast_struct。
struct task_struct {
?
}
- 1.
- 2.
- 3.
换句话说,你总得有一个结构来记录各个进程的信息,比如它上一次执行到哪里了,要不 CPU 就算决定好了要跳转到你这个进程上运行,具体跳到哪一行运行,总得有个地方存吧?
我们一个个问题抛开来看。
上下文环境
每个程序最终的本质就是执行指令。这个过程会涉及寄存器,内存和外设端口。 内存还有可能设计成相互错开的,互不干扰,比如进程 1 你就用 0~1K 的内存空间,进程 2 就用 1K~2K 的内存空间,咱谁也别影响谁。
虽然有点浪费空间,而且对程序员十分不友好,但起码还是能实现的。
不过寄存器一共就那么点,肯定做不到互不干扰,可能一个进程就把寄存器全用上了,那其他进程咋整。
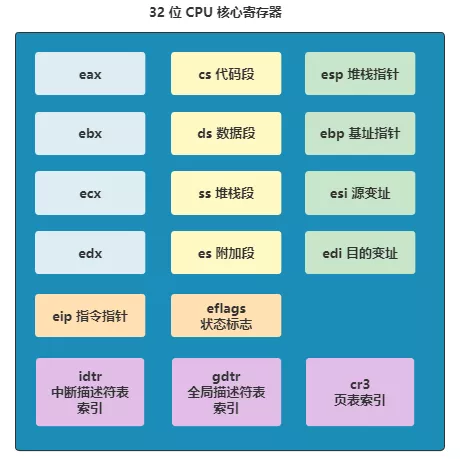
比如程序 1 刚刚往 eax 写入一个值,准备用,这时切换到进程 2 了,又往 eax 里写入了一个值。那么之后再切回进程 1 的时候,就出错了。 所以最稳妥的做法就是,每次切换进程时,都把当前这些寄存器的值存到一个地方,以便之后切换回来的时候恢复。 Linux 0.11 就是这样做的,每个进程的结构 task_struct 里面,有一个叫 tss 的结构,存储的就是 CPU 这些寄存器的信息。
struct task_struct {
...
struct tss_struct tss;
}
struct tss_struct {
long back_link; /* 16 high bits zero */
long esp0;
long ss0; /* 16 high bits zero */
long esp1;
long ss1; /* 16 high bits zero */
long esp2;
long ss2; /* 16 high bits zero */
long cr3;
long eip;
long eflags;
long eax,ecx,edx,ebx;
long esp;
long ebp;
long esi;
long edi;
long es; /* 16 high bits zero */
long cs; /* 16 high bits zero */
long ss; /* 16 high bits zero */
long ds; /* 16 high bits zero */
long fs; /* 16 high bits zero */
long gs; /* 16 high bits zero */
long ldt; /* 16 high bits zero */
long trace_bitmap; /* bits: trace 0, bitmap 16-31 */
struct i387_struct i387;
};
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
这里提个细节。
你发现 tss 结构里还有个 cr3 不?它表示 cr3 寄存器里存的值,而 cr3 寄存器是指向页目录表首地址的。
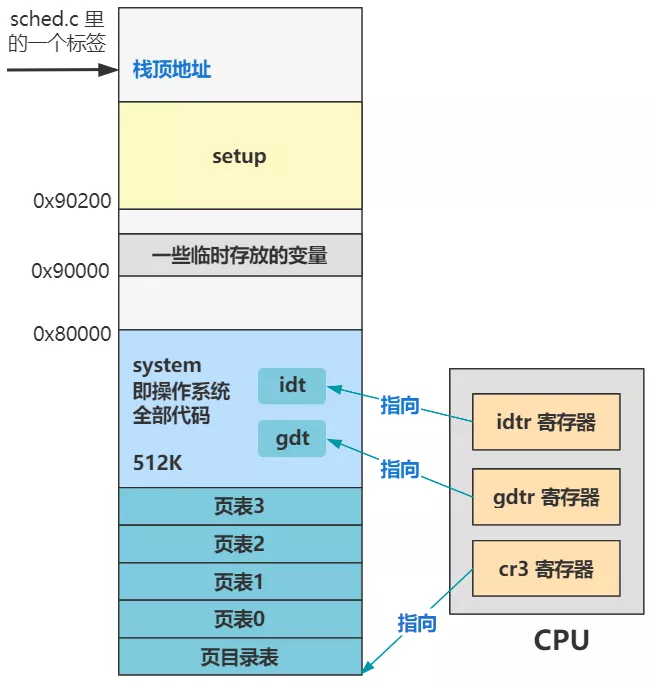
那么指向不同的页目录表,整个页表结构就是完全不同的一套,那么逻辑地址到线性地址的映射关系就有能力做到不同。 也就是说,在我们刚刚假设的理想情况下,不同程序用不同的内存地址可以做到内存互不干扰。
但是有了这个 cr3 字段,就完全可以无需由各个进程自己保证不和其他进程使用的内存冲突,因为只要建立不同的映射关系即可,由操作系统来建立不同的页目录表并替换 cr3 寄存器即可。
这也可以理解为,保存了内存映射的上下文信息。
当然 Linux 0.11 并不是通过替换 cr3 寄存器来实现内存互不干扰的,它的实现更为简单,这是后话了。
运行时间信息
如何判断一个进程该让出 CPU 了,切换到下一个进程呢? 总不能是每次时钟中断时都切换一次吧?一来这样不灵活,二来这完全依赖时钟中断的频率,有点危险。 所以一个好的办法就是,给进程一个属性,叫剩余时间片,每次时钟中断来了之后都 -1,如果减到 0 了,就触发切换进程的操作。 在 Linux 0.11 里,这个属性就是 counter。
struct task_struct {
...
long counter;
...
struct tss_struct tss;
}
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
而他的用法也非常简单,就是每次中断都判断一下是否到 0 了。
void do_timer(long cpl) {
...
// 当前线程还有剩余时间片,直接返回
if ((--current->counter)>0) return;
// 若没有剩余时间片,调度
schedule();
}
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
如果还没到 0,就直接返回,相当于这次时钟中断什么也没做,仅仅是给当前进程的时间片属性做了 -1 操作。
如果已经到 0 了,就触发进程调度,选择下一个进程并使 CPU 跳转到那里运行。
进程调度的逻辑就是在 schedule 函数里,怎么调,我们先不管。
优先级
上面那个 counter 一开始的时候该是多少呢?而且随着 counter 不断递减,减到 0 时,下一轮回中这个 counter 应该赋予什么值呢? 其实这俩问题都是一个问题,就是 counter 的初始化问题,也需要有一个属性来记录这个值。 往宏观想一下,这个值越大,那么 counter 就越大,那么每次轮到这个进程时,它在 CPU 中运行的时间就越长,也就是这个进程比其他进程得到了更多 CPU 运行的时间。 那我们可以把这个值称为优先级,是不是很形象。
struct task_struct {
...
long counter;
long priority;
...
struct tss_struct tss;
}
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
每次一个进程初始化时,都把 counter 赋值为这个 priority,而且当 counter 减为 0 时,下一次分配时间片,也赋值为这个。
其实叫啥都行,反正就是这么用的,就叫优先级吧。
进程状态
其实我们有了上面那三个信息,就已经可以完成进程的调度了。 甚至如果你的操作系统让所有进程都得到同样的运行时间,连 counter 和 priority 都不用记录,就操作系统自己定一个固定值一直递减,减到 0 了就随机切一个新进程。
这样就仅仅维护好寄存器的上下文信息 tss 就好了。 但我们总要不断优化以适应不同场景的用户需求的,那我们再优化一个细节。 很简单的一个场景,一个进程中有一个读取硬盘的操作,发起读请求后,要等好久才能得到硬盘的中断信号。 那这个时间其实该进程再占用着 CPU 也没用,此时就可以选择主动放弃 CPU 执行权,然后再把自己的状态标记为等待中。
意思是告诉进程调度的代码,先别调度我,因为我还在等硬盘的中断,现在轮到我了也没用,把机会给别人吧。 那这个状态可以记录一个属性了,叫 state,记录了此时进程的状态。
struct task_struct {
long state;
long counter;
long priority;
...
struct tss_struct tss;
}
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
而这个进程的状态在 Linux 0.11 里有这么五种。
#define TASK_RUNNING 0
#define TASK_INTERRUPTIBLE 1
#define TASK_UNINTERRUPTIBLE 2
#define TASK_ZOMBIE 3
#define TASK_STOPPED 4
- 1.
- 2.
- 3.
- 4.
- 5.
好了,目前我们这几个字段,就已经可以完成简单的进程调度任务了。
有表示状态的 state,表示剩余时间片的counter,表示优先级的 priority,和表示上下文信息的 tss。
其他字段我们需要用到的时候再说,今天只是头脑风暴一下进程调度设计的思路。 我们看一下 Linux 0.11 中进程结构的全部,心里先有个数,具体干嘛的先别管,就记住我们刚刚头脑风暴的那四个字段就行了。
struct task_struct {
/* these are hardcoded - don't touch */
long state; /* -1 unrunnable, 0 runnable, >0 stopped */
long counter;
long priority;
long signal;
struct sigaction sigaction[32];
long blocked; /* bitmap of masked signals */
/* various fields */
int exit_code;
unsigned long start_code,end_code,end_data,brk,start_stack;
long pid,father,pgrp,session,leader;
unsigned short uid,euid,suid;
unsigned short gid,egid,sgid;
long alarm;
long utime,stime,cutime,cstime,start_time;
unsigned short used_math;
/* file system info */
int tty; /* -1 if no tty, so it must be signed */
unsigned short umask;
struct m_inode * pwd;
struct m_inode * root;
struct m_inode * executable;
unsigned long close_on_exec;
struct file * filp[NR_OPEN];
/* ldt for this task 0 - zero 1 - cs 2 - ds&ss */
struct desc_struct ldt[3];
/* tss for this task */
struct tss_struct tss;
};
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
看吧,其实也没多少咯~
好了,今天我们完全由自己从零到有设计出了进程调度的大体流程,以及它需要的数据结构。
我们知道了进程调度的开始,要从一次定时器滴答来触发,通过时钟中断处理函数走到进程调度函数,然后去进程的结构 task_struct 中取出所需的数据,进行策略计算,并挑选出下一个可以得到 CPU 运行的进程,跳转过去。 那么下一讲,我们从一次时钟中断出发,看看一次 Linux 0.11 的进程调度的全过程。有了这两回做铺垫,之后再看主流程中的 fork 代码,将会非常清晰! 欲知后事如何,且听下回分解。
本文转载自微信公众号「低并发编程」,可以通过以下二维码关注。转载本文请联系低并发编程公众号。




















