












https://harmonyos.51cto.com
接着上章的代码继续往下看,将创建好的StreamInfo作为参数丢给StreamOperator进行流的创建
程序调用流程图
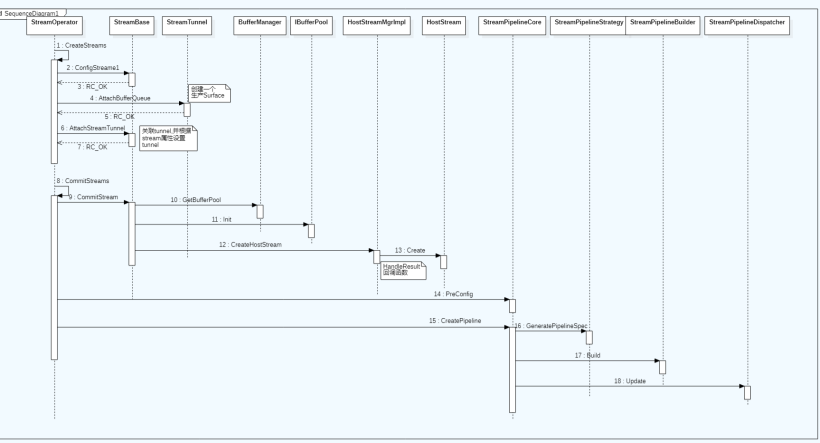
1. StreamOperator::CreateStreams()
创建过程
- 实例化一个stream对象,用stremInfos中的参数信息对相关成员进行赋值。
- 创建一个StreamTunnel对象,把StreamTunnel和stream进行绑定。
- 把创建好的每一个stream 对应它的stremId 放在 streamMap_里。
//drivers\peripheral\camera\hal\hdi_impl\src\stream_operator\stream_operator.cpp
CamRetCode StreamOperator::CreateStreams(const std::vector<std::shared_ptr<StreamInfo>>& streamInfos)
{
...
for (auto it : streamInfos) {
...
std::shared_ptr<IStream> stream = StreamFactory::Instance().CreateShared(
IStream::g_avaliableStreamType[it->intent_], it->streamId_, it->intent_, pipelineCore_, messenger_);
...
StreamConfiguration scg;
scg.id = it->streamId_;
scg.type = it->intent_;
scg.width = it->width_;
scg.height = it->height_;
PixelFormat pf = static_cast<PixelFormat>(it->format_);
scg.format = BufferAdapter::PixelFormatToCameraFormat(pf);
scg.dataspace = it->datasapce_; // fix misspell
scg.tunnelMode = it->tunneledMode_;
scg.minFrameDuration = it->minFrameDuration_;
scg.encodeType = it->encodeType_;
RetCode rc = stream->ConfigStream(scg);
...
if (it->bufferQueue_ != nullptr) {
auto tunnel = std::make_shared<StreamTunnel>();
CHECK_IF_PTR_NULL_RETURN_VALUE(tunnel, INSUFFICIENT_RESOURCES);
RetCode rc = tunnel->AttachBufferQueue(it->bufferQueue_);
CHECK_IF_NOT_EQUAL_RETURN_VALUE(rc, RC_OK, INVALID_ARGUMENT);
if (stream->AttachStreamTunnel(tunnel) != RC_OK) {
CAMERA_LOGE("attach buffer queue to stream [id = %{public}d] failed", it->streamId_);
return INVALID_ARGUMENT;
}
}
{
std::lock_guard<std::mutex> l(streamLock_);
streamMap_[stream->GetStreamId()] = stream;
}
}
return NO_ERROR;
}
这里需要注意的一个地方RetCode rc = tunnel->AttachBufferQueue(it->bufferQueue_);单独把这个代码帖出来看下
//drivers\peripheral\camera\hal\hdi_impl\src\stream_operator\stream_tunnel.cpp
RetCode StreamTunnel::AttachBufferQueue(OHOS::sptr<OHOS::IBufferProducer>& producer)
{
CHECK_IF_PTR_NULL_RETURN_VALUE(producer, RC_ERROR);
bufferQueue_ = OHOS::Surface::CreateSurfaceAsProducer(producer); //Buffer的生产者使用该函数创建一个Surface,只能使用与生产相关的接口
CHECK_IF_PTR_NULL_RETURN_VALUE(bufferQueue_, RC_ERROR);
return RC_OK;
}
这个成员函数的作用就是把应用层中的StreamCustomer::CreateProducer()获取的producer作为参数创建与“消费者”对应的“生成型”Surface。 而StreamTunnel类就是对这个生成型Surface的一个功能封装。
2. StreamOperator::CommitStreams()
源码有点长 去掉一些参数的校验和准备相关的代码
一共调用 StreamBase::CommitStream() 、StreamPipelineCore::PreConfig()、StreamPipelineCore::CreatePipeline()三个函数
下面一个个来看
//drivers\peripheral\camera\hal\hdi_impl\src\stream_operator\stream_operator.cpp
CamRetCode StreamOperator::CommitStreams(OperationMode mode,
const std::shared_ptr<CameraStandard::CameraMetadata>& modeSetting)
{
...
{
std::lock_guard<std::mutex> l(streamLock_);
for (auto it : streamMap_) {
if (it.second->CommitStream() != RC_OK) {
CAMERA_LOGE("commit stream [id = %{public}d] failed.", it.first);
return DEVICE_ERROR;
}
}
}
RetCode rc = streamPipeline_->PreConfig(modeSetting);
if (rc != RC_OK) {
CAMERA_LOGE("prepare mode settings failed");
return DEVICE_ERROR;
}
rc = streamPipeline_->CreatePipeline(mode);
if (rc != RC_OK) {
CAMERA_LOGE("create pipeline failed.");
return INVALID_ARGUMENT;
}
DFX_LOCAL_HITRACE_END;
return NO_ERROR;
}
2.1 StreamBase::CommitStream()
按照代码LOG中的说明commit a stream to pipeline。大家可以自行理解,本人的理解是
- 通过BufferManager创建并初始化BufferPool 数据缓存池
- 给这个Stream对应的pipeline 创建一个StreamMgr,让pipeline可以通过StreamMgr对Stream进行对应的控制。
//drivers\peripheral\camera\hal\hdi_impl\src\stream_operator\stream_base.cpp
RetCode StreamBase::CommitStream()
{
...
HostStreamInfo info;
info.type_ = static_cast<StreamIntent>(streamType_);
info.streamId_ = streamId_;
info.width_ = streamConfig_.width;
info.height_ = streamConfig_.height;
info.format_ = streamConfig_.format;
info.usage_ = streamConfig_.usage;
info.encodeType_ = streamConfig_.encodeType;
if (streamConfig_.tunnelMode) {
BufferManager* mgr = BufferManager::GetInstance();
CHECK_IF_PTR_NULL_RETURN_VALUE(mgr, RC_ERROR);
if (bufferPool_ == nullptr) {
poolId_ = mgr->GenerateBufferPoolId();
CHECK_IF_EQUAL_RETURN_VALUE(poolId_, 0, RC_ERROR);
bufferPool_ = mgr->GetBufferPool(poolId_);
if (bufferPool_ == nullptr) {
CAMERA_LOGE("stream [id:%{public}d] get buffer pool failed.", streamId_);
return RC_ERROR;
}
}
info.bufferPoolId_ = poolId_;
info.bufferCount_ = GetBufferCount();
RetCode rc = bufferPool_->Init(streamConfig_.width, streamConfig_.height, streamConfig_.usage,
streamConfig_.format, GetBufferCount(), CAMERA_BUFFER_SOURCE_TYPE_EXTERNAL);
if (rc != RC_OK) {
CAMERA_LOGE("stream [id:%{public}d] initialize buffer pool failed.", streamId_);
return RC_ERROR;
}
}
RetCode rc = hostStreamMgr_->CreateHostStream(info, [this](std::shared_ptr<IBuffer> buffer) {
HandleResult(buffer);
return;
});
...
return RC_OK;
}
2.2 StreamPipelineCore::PreConfig()
这里的代码比较简单,根据参数信息,调用deviceManager的PreConfig接口从来配置下面的硬件设备。
deviceManager在前面PowerUp的解析已经说明了,Hi3516实际上是将硬件适配层相关的代码都封闭在了so里面,
所以这里实际调用就一行代码sysObject_->PreConfig(meta, settings);
//drivers\peripheral\camera\hal\pipeline_core\pipeline_impl\src\stream_pipeline_core.cpp
RetCode StreamPipelineCore::PreConfig(const ModeMeta& meta)
{
auto deviceManager = IDeviceManager::GetInstance();
CHECK_IF_PTR_NULL_RETURN_VALUE(deviceManager, RC_ERROR);
std::vector<DeviceStreamSetting> settings = {};
std::vector<int32_t> ids = {};
context_->streamMgr_->GetStreamIds(ids);
for (auto i : ids) {
auto info = context_->streamMgr_->GetStreamInfo(i);
DeviceStreamSetting setting = {info.streamId_, info.bufferCount_, info.width_, info.height_,
info.format_, info.usage_, static_cast<CameraEncodeType>(info.encodeType_)};
settings.emplace_back(setting);
}
return deviceManager->PreConfig(meta, settings);
}
2.3 StreamPipelineCore::CreatePipeline()
有关stategy、builder、dispatcher实现的函数代码比较多,大家感兴趣自行阅读。总的说一下整体功能:
- StreamPipelineStrategy 负责根据mode从对应的配置文件中创建pipeline。
- StreamPipelineBuilder 负责创建Node并链接
- StreamPipelineDispatcher 负责管理创建好的pipeline
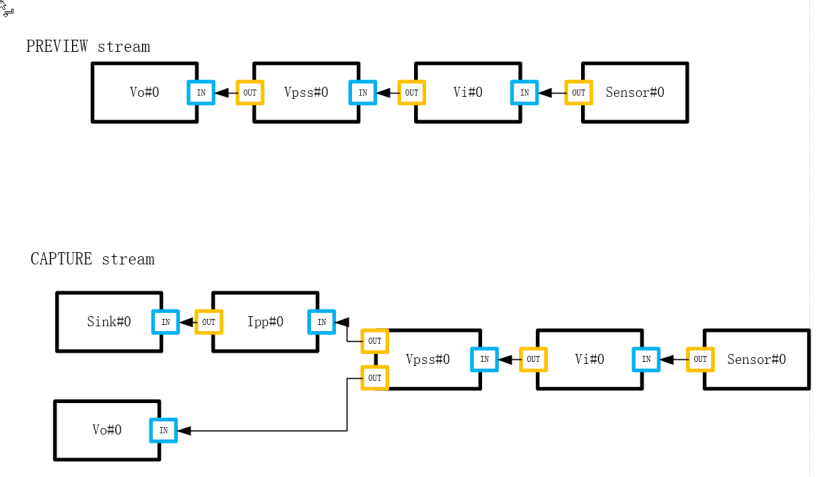
- 最终建立的StreamPipeline是由Node(节点)组成,Node(节点)由Port(端口)组成。Port(端口)分为in端口和out端口(可以有多个)。out链接in最终构建出整个StreamPipeline
Demo案例建立了两个streamPipeline
//drivers\peripheral\camera\hal\pipeline_core\pipeline_impl\src\stream_pipeline_core.cpp
RetCode StreamPipelineCore::CreatePipeline(const int32_t& mode)
{
std::lock_guard<std::mutex> l(mutex_);
std::shared_ptr<PipelineSpec> spec = strategy_->GeneratePipelineSpec(mode);
if (spec == nullptr) {
return RC_ERROR;
}
std::shared_ptr<Pipeline> pipeline = builder_->Build(spec);
if (pipeline == nullptr) {
return RC_ERROR;
}
return dispatcher_->Update(pipeline);
}
需要注意几个问题
- pipeline的配置文件在drivers\peripheral\camera\hal\pipeline_core\pipeline_impl\src\strategy\config目录下的config.c和params.c
- 这两个文件是由BUILD.gn 脚本生成的。
//drivers\peripheral\camera\hal\adapter\chipset\hispark_taurus\BUILD.gn
source =
"$camera_path/pipeline_core/pipeline_impl/src/strategy/config/config.c"
exec_script(
"//drivers/framework/tools/hc-gen/build_hcs.py",
[
"-o",
rebase_path(
"$camera_path/pipeline_core/pipeline_impl/src/strategy/config/config.c"),
"-t",
rebase_path(
"//vendor/hisilicon/Hi3516DV300/hdf_config/uhdf/camera/hal/mpp/hispark_taurus/pipeline_core/config.hcs"),
],
"")
}
ohos_prebuilt_etc("params.c") {
source =
"$camera_path/pipeline_core/pipeline_impl/src/strategy/config/params.c"
exec_script(
"//drivers/framework/tools/hc-gen/build_hcs.py",
[
"-o",
rebase_path(
"$camera_path/pipeline_core/pipeline_impl/src/strategy/config/params.c"),
"-t",
rebase_path(
"//vendor/hisilicon/Hi3516DV300/hdf_config/uhdf/camera/hal/mpp/hispark_taurus/pipeline_core/params.hcs"),
],
"")
}
3. 小结
到此流的创建也完成了,最后一章节会把图像采集的代码讲解完。
https://harmonyos.51cto.com


























