近几十年,人类的生活方式发生了非常重大的变化,这凸显了对远程和自动化过程的需求。但是,现如今的机器人还不够成熟,还不足以执行日常任务,比如操控物体或在不可预测的复杂环境中移动。另外,如今的机器人也还不能足够安全地与人类和室外环境进行交互。
大脑与机体的适当平衡是创造行为更自然和全集成的智能机器人的先决条件。机器人设计通过使用软件已经实现了相当成功的自动化,但设计新材料和开发机器人学方法需要人类参与其中,因为这涉及到范围更广的技能组合。
举个例子,在新兴的软体机器人学领域,为了得到所需的机器人功能,仍旧没有与结构设计和控制器设计组合使用的材料选取与合成方法。
因此,未来十年内,机器人学领域的一大主要缺口是:为机器人机体以及机体形态与智能控制系统和基于学习的方法的共同进化开发新材料和新结构。为了填补这一缺口,机器人学社区的一大重要发展趋势是实现机体、控制、形态、动作执行和感知的协同进化。这里将其称为实体人工智能(PAI)。
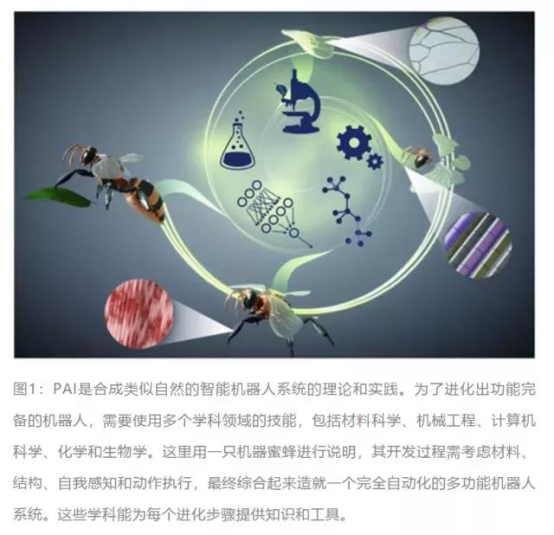
PAI是指能够执行通常与智能生物体相关的任务的实体系统,该领域包含理论和实践。PAI方法论原本就自带对材料、设计和生产制造的考虑。使用PAI开发的机器人可以利用自身机体的物理和计算特征,再加上它们大脑的计算能力,有望在非结构化环境中自动执行任务和维持稳态。类似于生物体,PAI机器人既可以替代数字AI,也能通过连接大脑来为数字 AI提供协同辅助。很多小型机器人(计算能力有限的机器人)没有专用的中心大脑,它们的性能由机体的计算引导。
类似于自然多样性原理,PAI合成(synthesis)是指具有任意功能、形状、大小和适宜场景(habitat)的机器人系统,其中尤其注重对基于化学、生物和材料的功能的整合。因此,PAI与机体变化方法无关,并且有别于具身智能(embodiedintelligence)。PAI 合成的要义在于从材料层面到形态层面再到机器人系统层面将多种不同的功能特性成功地组合到一起。