本文介绍在使用 PyTorch 训练深度模型时最省力、最有效的 17 种方法。该文所提方法,都是假设你在 GPU 环境下训练模型。具体内容如下。
01. 考虑换一种学习率 schedule
学习率 schedule 的选择对模型的收敛速度和泛化能力有很大的影响。Leslie N. Smith 等人在论文《Cyclical Learning Rates for Training Neural Networks》、《Super-Convergence: Very Fast Training of Neural Networks Using Large Learning Rates 》中提出了周期性(Cyclical)学习率以及 1Cycle 学习率 schedule。之后,fast.ai 的 Jeremy Howard 和 Sylvain Gugger 对其进行了推广。下图是 1Cycle 学习率 schedule 的图示:
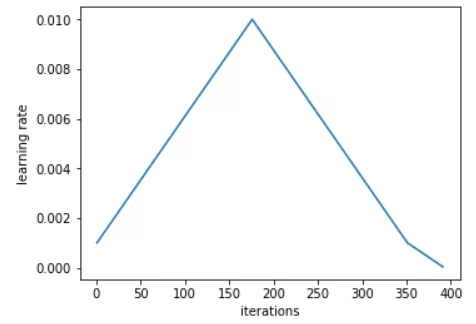
Sylvain 写到:1Cycle 包括两个等长的步幅,一个步幅是从较低的学习率到较高的学习率,另一个是回到最低水平。最大值来自学习率查找器选取的值,较小的值可以低十倍。然后,这个周期的长度应该略小于总的 epochs 数,并且,在训练的最后阶段,我们应该允许学习率比最小值小几个数量级。
与传统的学习率 schedule 相比,在最好的情况下,该 schedule 实现了巨大的加速(Smith 称之为超级收敛)。例如,使用 1Cycle 策略在 ImageNet 数据集上训练 ResNet-56,训练迭代次数减少为原来的 1/10,但模型性能仍能比肩原论文中的水平。在常见的体系架构和优化器中,这种 schedule 似乎表现得很好。
Pytorch 已经实现了这两种方法:「torch.optim.lr_scheduler.CyclicLR」和「torch.optim.lr_scheduler.OneCycleLR」。
参考文档:https://pytorch.org/docs/stable/optim.html
02. 在 DataLoader 中使用多个 worker 和页锁定内存
当使用 torch.utils.data.DataLoader 时,设置 num_workers > 0,而不是默认值 0,同时设置 pin_memory=True,而不是默认值 False。
参考文档:https://pytorch.org/docs/stable/data.html
来自 NVIDIA 的高级 CUDA 深度学习算法软件工程师 Szymon Micacz 就曾使用四个 worker 和页锁定内存(pinned memory)在单个 epoch 中实现了 2 倍的加速。人们选择 worker 数量的经验法则是将其设置为可用 GPU 数量的四倍,大于或小于这个数都会降低训练速度。请注意,增加 num_workers 将增加 CPU 内存消耗。
03. 把 batch 调到最大
把 batch 调到最大是一个颇有争议的观点。一般来说,如果在 GPU 内存允许的范围内将 batch 调到最大,你的训练速度会更快。但是,你也必须调整其他超参数,比如学习率。一个比较好用的经验是,batch 大小加倍时,学习率也要加倍。
OpenAI 的论文《An Empirical Model of Large-Batch Training》很好地论证了不同的 batch 大小需要多少步才能收敛。在《How to get 4x speedup and better generalization using the right batch size》一文中,作者 Daniel Huynh 使用不同的 batch 大小进行了一些实验(也使用上面讨论的 1Cycle 策略)。最终,他将 batch 大小由 64 增加到 512,实现了 4 倍的加速。
然而,使用大 batch 的不足是,这可能导致解决方案的泛化能力比使用小 batch 的差。
04. 使用自动混合精度(AMP)
PyTorch 1.6 版本包括对 PyTorch 的自动混合精度训练的本地实现。这里想说的是,与单精度 (FP32) 相比,某些运算在半精度 (FP16) 下运行更快,而不会损失准确率。AMP 会自动决定应该以哪种精度执行哪种运算。这样既可以加快训练速度,又可以减少内存占用。
在最好的情况下,AMP 的使用情况如下:
- import torch
- # Creates once at the beginning of training
- scaler = torch.cuda.amp.GradScaler()
- for data, label in data_iter:
- optimizer.zero_grad()
- # Casts operations to mixed precision
- with torch.cuda.amp.autocast():
- loss = model(data)
- # Scales the loss, and calls backward()
- # to create scaled gradients
- scaler.scale(loss).backward()
- # Unscales gradients and calls
- # or skips optimizer.step()
- scaler.step(optimizer)
- # Updates the scale for next iteration
- scaler.update()
05. 考虑使用另一种优化器
AdamW 是由 fast.ai 推广的一种具有权重衰减(而不是 L2 正则化)的 Adam,在 PyTorch 中以 torch.optim.AdamW 实现。AdamW 似乎在误差和训练时间上都一直优于 Adam。
Adam 和 AdamW 都能与上面提到的 1Cycle 策略很好地搭配。
目前,还有一些非本地优化器也引起了很大的关注,最突出的是 LARS 和 LAMB。NVIDA 的 APEX 实现了一些常见优化器的融合版本,比如 Adam。与 PyTorch 中的 Adam 实现相比,这种实现避免了与 GPU 内存之间的多次传递,速度提高了 5%。
06. cudNN 基准
如果你的模型架构保持不变、输入大小保持不变,设置 torch.backends.cudnn.benchmark = True。
07. 小心 CPU 和 GPU 之间频繁的数据传输
当频繁地使用 tensor.cpu() 将张量从 GPU 转到 CPU(或使用 tensor.cuda() 将张量从 CPU 转到 GPU)时,代价是非常昂贵的。item() 和 .numpy() 也是一样可以使用. detach() 代替。
如果你创建了一个新的张量,可以使用关键字参数 device=torch.device( cuda:0 ) 将其分配给 GPU。
如果你需要传输数据,可以使用. to(non_blocking=True),只要在传输之后没有同步点。
08. 使用梯度 / 激活 checkpointing
Checkpointing 的工作原理是用计算换内存,并不存储整个计算图的所有中间激活用于 backward pass,而是重新计算这些激活。我们可以将其应用于模型的任何部分。
具体来说,在 forward pass 中,function 会以 torch.no_grad() 方式运行,不存储中间激活。相反的是, forward pass 中会保存输入元组以及 function 参数。在 backward pass 中,输入和 function 会被检索,并再次在 function 上计算 forward pass。然后跟踪中间激活,使用这些激活值计算梯度。
因此,虽然这可能会略微增加给定 batch 大小的运行时间,但会显著减少内存占用。这反过来又将允许进一步增加所使用的 batch 大小,从而提高 GPU 的利用率。
尽管 checkpointing 以 torch.utils.checkpoint 方式实现,但仍需要一些思考和努力来正确地实现。Priya Goyal 写了一个很好的教程来介绍 checkpointing 关键方面。
Priya Goyal 教程地址:
09. 使用梯度积累
增加 batch 大小的另一种方法是在调用 optimizer.step() 之前在多个. backward() 传递中累积梯度。
Hugging Face 的 Thomas Wolf 的文章《Training Neural Nets on Larger Batches: Practical Tips for 1-GPU, Multi-GPU & Distributed setups》介绍了如何使用梯度累积。梯度累积可以通过如下方式实现:
- model.zero_grad() # Reset gradients tensors
- for i, (inputs, labels) in enumerate(training_set):
- predictions = model(inputs) # Forward pass
- loss = loss_function(predictions, labels) # Compute loss function
- lossloss = loss / accumulation_steps # Normalize our loss (if averaged)
- loss.backward() # Backward pass
- if (i+1) % accumulation_steps == 0: # Wait for several backward steps
- optimizer.step() # Now we can do an optimizer step
- model.zero_grad() # Reset gradients tensors
- if (i+1) % evaluation_steps == 0: # Evaluate the model when we...
- evaluate_model() # ...have no gradients accumulate
这个方法主要是为了规避 GPU 内存的限制而开发的。
10. 使用分布式数据并行进行多 GPU 训练
加速分布式训练可能有很多方法,但是简单的方法是使用 torch.nn.DistributedDataParallel 而不是 torch.nn.DataParallel。这样一来,每个 GPU 将由一个专用的 CPU 核心驱动,避免了 DataParallel 的 GIL 问题。
分布式训练文档地址:https://pytorch.org/tutorials/beginner/dist_overview.html
11. 设置梯度为 None 而不是 0
梯度设置为. zero_grad(set_to_none=True) 而不是 .zero_grad()。这样做可以让内存分配器处理梯度,而不是将它们设置为 0。正如文档中所说,将梯度设置为 None 会产生适度的加速,但不要期待奇迹出现。注意,这样做也有缺点,详细信息请查看文档。
文档地址:https://pytorch.org/docs/stable/optim.html
12. 使用. as_tensor() 而不是. tensor()
torch.tensor() 总是会复制数据。如果你要转换一个 numpy 数组,使用 torch.as_tensor() 或 torch.from_numpy() 来避免复制数据。
13. 必要时打开调试工具
PyTorch 提供了很多调试工具,例如 autograd.profiler、autograd.grad_check、autograd.anomaly_detection。请确保当你需要调试时再打开调试器,不需要时要及时关掉,因为调试器会降低你的训练速度。
14. 使用梯度裁剪
关于避免 RNN 中的梯度爆炸的问题,已经有一些实验和理论证实,梯度裁剪(gradient = min(gradient, threshold))可以加速收敛。HuggingFace 的 Transformer 实现就是一个非常清晰的例子,说明了如何使用梯度裁剪。本文中提到的其他一些方法,如 AMP 也可以用。
在 PyTorch 中可以使用 torch.nn.utils.clip_grad_norm_来实现。
15. 在 BatchNorm 之前关闭 bias
在开始 BatchNormalization 层之前关闭 bias 层。对于一个 2-D 卷积层,可以将 bias 关键字设置为 False:torch.nn.Conv2d(..., bias=False, ...)。
16. 在验证期间关闭梯度计算
在验证期间关闭梯度计算,设置:torch.no_grad() 。
17. 使用输入和 batch 归一化
要再三检查一下输入是否归一化?是否使用了 batch 归一化?