












简述
很幸运被51cto抽中试用HiSpark_Wi-Fi_IoT_Hi3861_CH340G的机会。关注鸿蒙也有一段时间了但是一直没有时间去系统的学习研究下,借这次机会正好学习下鸿蒙硬件方面的开发。本篇主要介绍下开发套件的硬件组装。

注:相关设备来源于51CTO鸿蒙技术社区【开发板漂流计划】提供
套件全家桶
打开HarmonyOS开发板套件包装可以看到配套齐全而且螺丝和螺丝也是按类别分包包装避免用错螺丝的问题。
套件产品

注:相关设备来源于51CTO鸿蒙技术社区【开发板漂流计划】提供
套件优点
- 套件配套齐全完整
- 电路板做工还可以
- 主板内嵌USB转串口省去外接转换头
套件缺点
- 螺丝和螺母的用材上有待提升安装的过程部分不容易安装紧实,自攻丝容易滑丝
- 螺母的做工有点尴尬没有开螺纹

套件组装
刚接触这个其实组装还是满费劲的,主要不知道如何下手,对照文档(B站有官方的安装视频)装个两三个小时最终成功运行还去蛮激动的。所有的安装都是基于小车底板进行组装的。

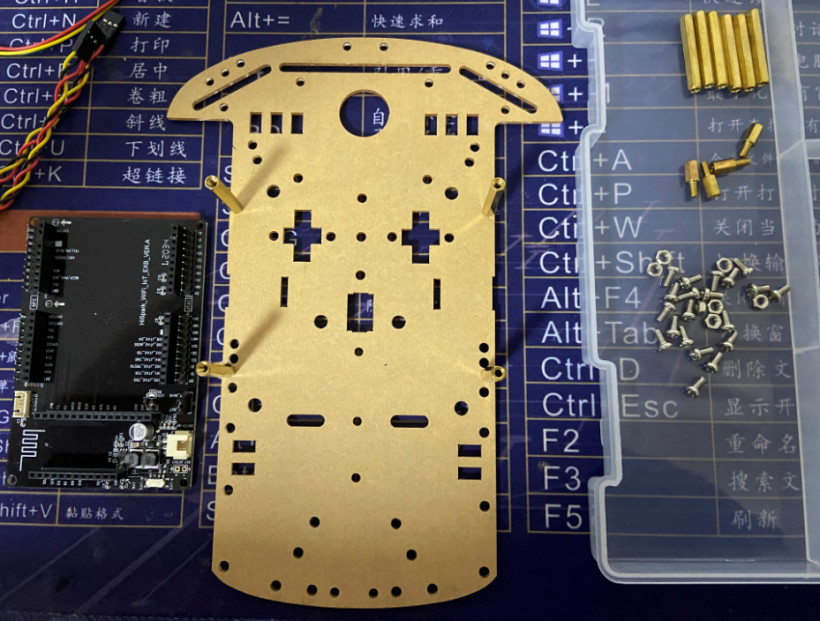
1.安装通用底板螺柱
首先在配件中找到小车底座(因为贴纸不好抠就没有抠感觉这样更容易看清底座上的孔),在底座左右两侧最边边有四个孔用来固定长螺柱(共10个长螺柱4个用来固定通用底板2个用来固定寻迹2个用来固定舵机2个用来固定NFC板),后期用来固定通用底板的。
2.安装电机马达
找到马达固定支架和螺丝,将支架卡在小车底座上固定住马达,再用螺丝传过支架和码进行固定。

固定时候需要注意\color{#f00}{马达的红线靠近底座}马达的红线靠近底座,因为这样和小车的出厂程序运行方向对应,不然小车运行方向会相反,当然后期自己烧自己的程序,方向就有自己定了。
3.安装轮胎和万向轮
固定好马达后就可以安装两个轮胎,插在马达上即可,不知道是我安装的问题还是,感觉轮胎看着有点歪……
然后在底座尾部用万向轮(横向方)找下四个孔的位置,给这四个孔装上四个短的螺柱,并用螺丝将万向轮固定在上面。
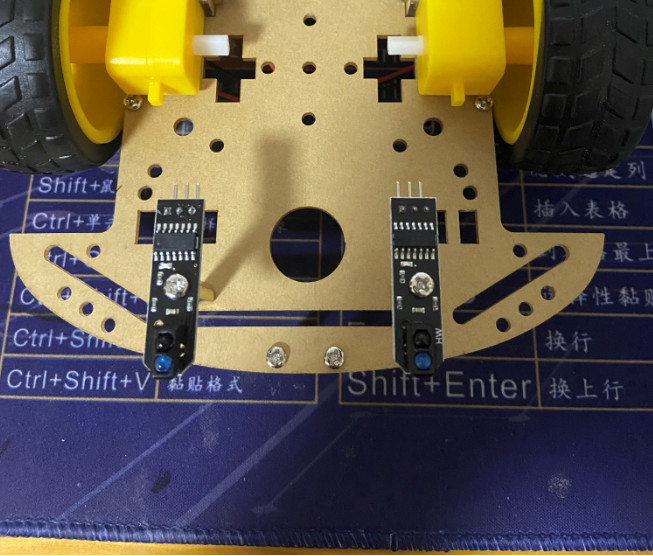
4.安装寻迹和舵机
寻迹和舵机都在车头位置,寻迹在车底用2个长螺柱固定。
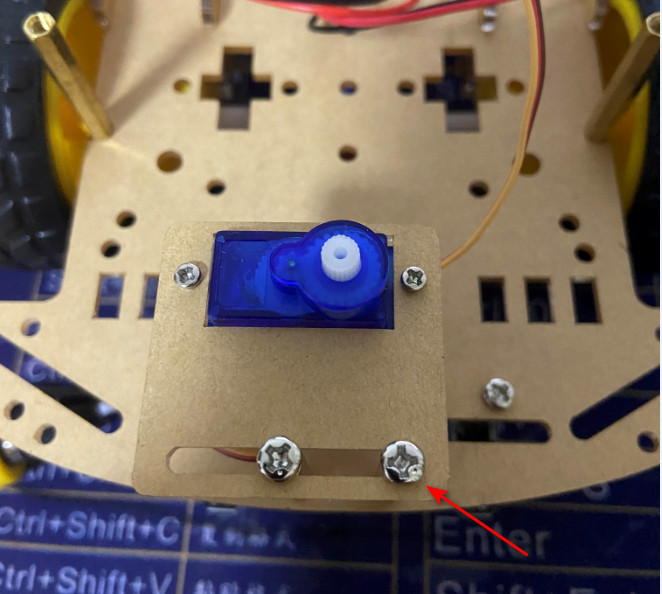
舵机在车顶也用2个长螺柱固定。
然后将寻迹固定在车底的螺柱上
接着找到舵机包,组装舵机到舵机支架上,螺丝不是很好上(我扭滑丝了一个螺丝,螺丝的十字口被扭成圆孔了……)
将舵机固定在车顶的螺柱上,注意固定的时候以右侧口为基准线,这样舵机正好在车底座的正中央
5.安装电池盒
我没有锂电池所有我选择了干电池盒,将干电池盒固定好后可以直接把电池装好,后面上了通用版和NFC版后电池就有点难装,我后来装的时候还把NFC板拆了才把电池装进去了……
6.安装NFC板
在车底座左右两侧都可以安装,不过左侧是竖着安装,右侧是横着安装。安装NFC板前一定要装上电池不然电池会被挡住装不进去还得拆掉
先安装螺柱
再将NFC固定在螺柱上
7.安装EXB通用底板
通用底板简单直接固定在之前的四个螺柱上即可。
8.安装Hi3861板
直接插在通用底板上即可
9.安装OLED显示板
直接插在通用底板上即可
10.安装Robot机器人板
直接插在通用底板上即可
11.连线
连线需要注意两头要对应,例如寻迹黄线接的GND那么在机器人板上的传感器GND针脚就插黄色线。
电源和NFC接线
12.安装超声波传感器
比较难安装,自攻螺丝我只反向装了一个正装卡进舵机(不知道是我哪里不对那是)不然就装不紧
13.安装电池开机
主要通用主板上跳帽在左侧,然后波动总开关上电。
总结
从安装到运行整体取决于动手能力,必定我的动手能力一般所以用了两三个小时。在安装的过程中基本都还是顺利,虽然有部分螺丝不是很理想,但是至少够组装起来。如果能在螺丝材料用料上和舵机支架尺寸精准度上在提升一点儿就更完美。















