













本文讲解 pinctrl 子系统和 gpio 子系统的 API,以及使用示例。
传统的配置 pin 的方式就是直接操作相应的寄存器,但是这种配置方式比较繁琐、而且容易出问题(比如 pin 功能冲突)。pinctrl 子系统就是为了解决这个问题而引入的,pinctrl 子系统主要工作内容如下:
①获取设备树中 pin 信息。
②根据获取到的 pin 信息来设置 pin 的复用功能
③根据获取到的 pin 信息来设置 pin 的电气特性,比如上/下拉、速度、驱动能力等。
对于我们使用者来讲,只需要在设备树里面设置好某个 pin 的相关属性即可,其他的初始化工作均由 pinctrl 子系统来完成。
如果 pinctrl 将一个 pin 脚初始化为 GPIO 而不是 IIC 或者 SPI,那么接下来就可以使用 gpio 子系统的API。
gpio 子系统是基于 pinctrl 子系统的!pin controller 和 GPIO Controller 不是一回事,前者控制引脚可用于 GPIO 功能、I2C 功能等功能性切换;后者只是把引脚配置为输入、输出、设置GPIO方向、获取值等简单的功能。(pinctrl 的 api 其实可以实现所有需求,但 gpio 的函数更常用一些)
1、gpio 子系统 API
gpio 子系统中操作一个 GPIO 需要如下几步:
- 1、of_find_compatible_node
- 2、of_get_named_gpio
- 3、gpio_request
- 4、控制gpio(gpio_direction_input、gpio_direction_output……)
- 5、gpio_free
1)of_find_compatible_node 函数在设备树中根据 device_type 和 compatible 这两个属性查找指定的节点,此处是为了获取在设备树中设置的 GPIO 的节点句柄。如果其他地方有获得句柄,那么可以直接使用这个句柄。
2) of_get_named_gpio ,获取所设置的 gpio number。
3) gpio_request ,请求这个 gpio 。如果其他地方请求了这个 gpio,还没有释放,那么我们会请求不到。
4)请求到这个 gpio 以后,我们就可以对它进行操作,比如获取到它的值,设置它的值。
5)使用完以后,释放这个 gpio。
原理图:
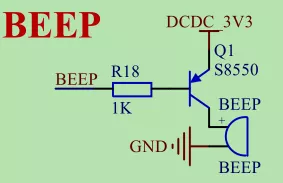
博主手里有一个 正点原子 imx6ull 开发板,查原理图,发现蜂鸣器直连的 GPIO 是 GPIO5_1。我把此 IO 口拉低,蜂鸣器就会响。
在设备树中增加如下代码(imx6ull-alientek-emmc.dts)
- test:test {
- compatible = "Jason_hello";
- hello = <&gpio5 1 GPIO_ACTIVE_HIGH>;
- };
设置 GPIO 为 GPIO5_1,高电平有效,但实际上第三个参数我没有使用。
gpio.c
- #include <linux/init.h>
- #include <linux/kernel.h>
- #include <linux/module.h>
- #include <linux/gpio.h>
- #include <linux/of.h>
- #include <linux/of_gpio.h>
- static int __init mypinctrl_init(void)
- {
- int gpionum = 0;
- int ret = 0;
- struct device_node *node = NULL;
- node = of_find_compatible_node(NULL,NULL,"Jason_hello");
- if(!node){
- printk("get node error\n");
- return ret;
- }
- gpionum = of_get_named_gpio(node,"hello",0);
- if(gpionum < 0){
- printk("get gpionum error\n");
- return ret;
- }
- ret = gpio_request(gpionum,"hello");
- if(ret){
- printk("gpio_request error\n");
- return ret;
- }
- printk("gpio(%d) value = %d\n",gpionum,ret);
- ret = gpio_get_value(gpionum);
- printk("gpio(%d) value = %d\n",gpionum,ret);
- gpio_direction_output(gpionum,0); // 设置 gpio 输出低电平
- ret = gpio_get_value(gpionum);
- printk("gpio(%d) value = %d\n",gpionum,ret);
- return 0;
- }
- static void __exit mypinctrl_exit(void)
- {
- printk("%s\n",__func__);
- }
- module_init(mypinctrl_init);
- module_exit(mypinctrl_exit);
- MODULE_LICENSE("GPL");
Makefile
- KERNELDIR := /home/book/linux/tool/kernel/linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek
- CURRENT_PATH := $(shell pwd)
- obj-m := gpio.o
- build: kernel_modules
- kernel_modules:
- $(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
- clean:
- $(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean
在 Linux 内核源码根目录中输入 make dtbs,编译一份设备树,下载进开发板。
在 kernel/drivers/misc/ 中新建文件夹,命名为 mygpio,里面放置 gpio.c 和 Makefile。然后输入 make 编译出 gpio.ko。然后拷贝进板子,insmod 上去,可以发现蜂鸣器有响。
2、pinctrl 子系统 API
pinctrl 子系统的 API 有很多,对于驱动工程师来说,pinctrl 操作一个 GPIO 只需要三步:
- 1、devm_pinctrl_get
- 2、pinctrl_lookup_state
- 3、pinctrl_select_state
在 Linux 中,加 devm_ 开头的函数,代表这个函数支持资源管理。一般情况下,我们写一个驱动程序,在程序开头都会申请资源,比如内存、中断号等,万一后面哪一步申请出错,我们要回滚到第一步,去释放已经申请的资源,这样很麻烦。后来 Linux 开发出了很多 devm_ 开头的函数,代表这个函数有支持资源管理的版本,不管哪一步出错,只要错误退出,就会自动释放所申请的资源。
1)devm_pinctrl_get:用于获取设备树中自己用 pinctrl 建立的节点的句柄;
2) pinctrl_lookup_state:用于选择其中一个 pinctrl 的状态,同一个 pinctrl 可以有很多状态。比如 GPIO50 ,一开始初始化的时候是 I2C ,设备待机时候,我希望切换到普通 GPIO 模式,并且配置为下拉输入,省电。这时候如果 pinctrl 节点有描述,我们就可以在代码中切换 pin 的功能,从 I2C 功能切换成普通 GPIO 功能;
3) pinctrl_select_stat:用于真正设置,在上一步获取到某个状态以后,这一步真正设置为这个状态。
对于 pinctrl 子系统的设备树配置,是遵守 service 和 client 结构。
client 端各个平台基本都是一样的,server 端每个平台都不一样,使用的字符串的配置也不一样。
设备树配置:
- //client端,设置不同状态
- &test {
- pinctrl-names = "default","test_low","test_high";
- pinctrl-0 = <&test_default>;
- pinctrl-1 = <&test_low>;
- pinctrl-2 = <&test_high>;
- gpio = <&gpio5 1 GPIO_ACTIVE_LOW>;
- status = "okay";
- };
- //server 即 pin controller 端,设置 GPIO 几种功能状态
- &gpio5 {
- test_default:test_default{};
- test_low:test_low{
- fsl,pins = <
- MX6UL_PAD_GPIO5_IO01__GPIO5_IO01 0x17059
- >
- };
- test_high:test_low{
- fsl,pins = <
- MX6UL_PAD_GPIO5_IO01__GPIO5_IO01 0x1b0b1
- >
- };
- };
pinctrl.c
- #include <linux/init.h>
- #include <linux/kernel.h>
- #include <linux/module.h>
- #include <linux/platform_device.h>
- #include <linux/delay.h>
- #include <linux/pinctrl/pinctrl.h>
- #include <linux/pinctrl/consumer.h>
- static int __init mypinctrl_init(void)
- {
- int ret = 0;
- struct pinctrl *pctrl;
- struct platform_device *pdev;
- struct pinctrl_state *test_high;
- struct pinctrl_state *test_low;
- pctrl = devm_pinctrl_get(&pdev->dev);
- if(IS_ERR(pctrl)){
- ret = PTR_ERR(pctrl);
- printk("devm_pinctrl_get error\n");
- return ret;
- }
- test_high = pinctrl_lookup_state(pctrl,"test_high");
- if(IS_ERR(pctrl)){
- ret = PTR_ERR(test_high);
- printk("pinctrl_lookup_state test_high error\n");
- return ret;
- }
- test_low = pinctrl_lookup_state(pctrl,"test_low");
- if(IS_ERR(pctrl)){
- ret = PTR_ERR(test_low);
- printk("pinctrl_lookup_state test_low error\n");
- return ret;
- }
- pinctrl_select_state(pctrl,test_low);
- udelay(200);
- pinctrl_select_state(pctrl,test_high);
- return 0;
- }
- static void __exit mypinctrl_exit(void)
- {
- printk("%s\n",__func__);
- }
- module_init(mypinctrl_init);
- module_exit(mypinctrl_exit);
- MUDULE_LICENSE("GPL");
Makefile 与上面相同,只是更改一下编译输出的名字。
这个驱动加载上去,可以切换GPIO口的功能状态,我这里只是控制GPIO输出高低,具体看你设备树怎么配,比如你可以配置某个GPIO一开始是I2C功能,待机时候是普通GPIO功能,达到省电的目的。
补充:
设备树是用来描述板子上的设备信息的,不同的设备其信息不同,反映到设备树中就是属性不同。那么我们在设备树中添加一个硬件对应的节点的时候从哪里查阅相关的说明呢?在Linux 内核源码中有详细的.txt 文档描述了如何添加节点,这些.txt 文档叫做绑定文档,路径为:Linux 源码目录/Documentation/devicetree/bindings。
比如我们现在要想在 I.MX6ULL 这颗 SOC 的 I2C 下添加一个节点,那么就可以查看Documentation/devicetree/bindings/i2c/i2c-imx.txt,此文档详细的描述了 I.MX 系列的 SOC 如何在设备树中添加 I2C 设备节点。
有时候使用的一些芯片在 Documentation/devicetree/bindings 目录下找不到对应的文档,这个时候就要咨询芯片的提供商,让他们给你提供参考的设备树文件。
小技巧:很多时候我们看设备树文件,里面的内容看不懂,这时候你看 .dts 最开始引用的头文件,点进去,你就会发现这些字符串是定义在这里的。
参考文档:
Documentation\devicetree\bindings\Pinctrl\Pinctrl-bindings.txt
Documentation\gpio\Pinctrl-bindings.txt
Documentation\devicetree\bindings\gpio\gpio.txt
Documentation\devicetree\bindings\pinctrl\pinctrl-bindings.txt
【编辑推荐】


















