arXiv上2021年12月3日上传的论文“Causal-based Time Series Domain Generalization for Vehicle Intention Prediction”,作者来自伯克利分校。

准确预测交通参与者的行为是自动驾驶车辆的基本能力。由于在动态变化的环境中导航,无论在何处以及遇到何种驾驶环境,都需要进行准确的预测。当自动驾驶车辆部署在现实世界中时,对未知域的泛化能力对预测模型至关重要。本文提出一种基于因果的时间序列域泛化(causal-based time series domain generalization,CTSDG)模型。构建一个车辆意图预测任务的结构化因果模型,学习用于域泛化de输入驾驶数据不变表征。进一步将递归潜变量 (latent variable) 模型集成到结构化因果模型中,更好地从时间序列输入数据中捕获时间潜在依赖性。
该文章被Neurips 2021的workshop on Distribution Shifts接收。
因果关系侧重于表示数据生成过程的结构知识,允许干预和更改,有助于理解和解决当前机器学习方法的一些局限性。事实上,结合或学习环境结构化知识的机器学习模型已被证明更有效,泛化效果更好。对于驾驶员来说,在不同域的交互方式也应该处理一些不变的结构化关系,因为这样可以快速调整驾驶技能以适应新的场景。因此,作者构建了一个用于车辆意图预测任务的结构化因果模型(SCM),以学习输入驾驶数据的不变表征,用于域泛化。
如图是CTSDG的框架图:其中观测量显示为阴影节点;潜量节点是透明的。有向黑边表示因果关系;虚线双向边表示相关性;空心虚线箭头表示包含关系。蓝线表示推理过程,绿线表示生成过程,红线表示递推过程。
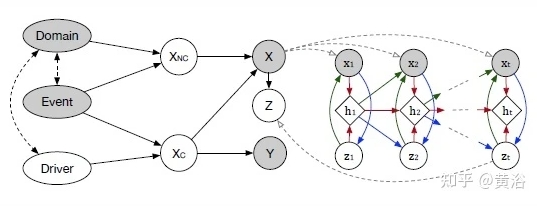
域(D)包含地图属性的不同组合,如道路拓扑、速度限制和交通规则;事件(E)表示两个车辆交互事件相关的可观察变量,包括初始交互状态和交互长度等信息;驾驶员(O)表示每个驾驶员的驾驶偏好或驾驶风格相关的不可观察变量,例如攻击性级别和他/她是否遵守交通规则;因果特征(XC)表示驾驶员的个人行为O及其交互状态E中衍生出的高级时间相关因果特征,使用这些特征来标记意图;非因果特征(XNC)表示域相关特征,不仅包含域特定信息D,还包含事件E本身。例如交互事件信息,两辆车开始相互注意时或道路协商开始时,与道路几何和交通规则相关;输入数据(X)是包含序贯多变量数据的车辆交互轨迹,由因果特征XC和非因果XNC特征混合构成;潜变量(Z)表示从时间序列车辆交互数据中提取出与时间相关的潜表示;标签(Y)是车辆意图标签。
采用一个表征函数 q去映射输入空间到一个潜空间,一个假设函数 映射潜空间到XC(因果)。合在一起,得到期望的意图预测器f,而对应的预测损失写成

XC(因果)需要满足一个不变性条件,考虑到驾驶员意图的不可观测性,得到一个预测损失函数如下:

上面匹配函数需要优化,假设XC不同域的相同类输入之间距离是受限的,可定义一个对比表征学习损失函数,最小化不同域的同类输入距离,即

作者把Variational Recurrent Neural Networks (VRNN)集成入CTSDG 模型,这样目标函数变成

最后的总目标函数为

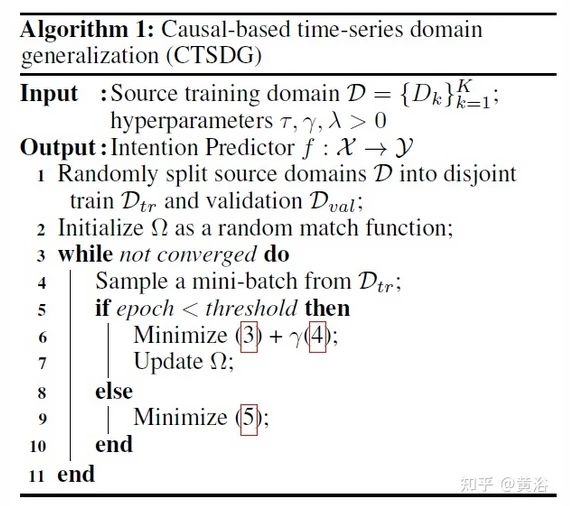
如下是CTSDG的伪代码算法:
实验比较结果如下:
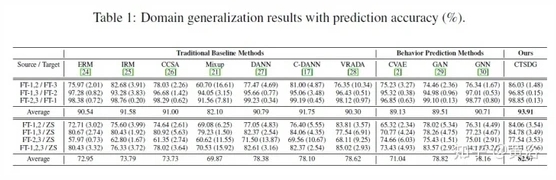
其中基准方法包括
传统域泛化任务的方法7个
- ERM:Oracle Inequalities in Empirical Risk Minimization and Sparse Recover Problems,2011
- IRM:Invariant risk minimization, 2019
- CCSA:Unified deep supervised domain adaptation and generalization,2017
- Mixup:mixup: Beyond empirical risk minimization,2017
- DANN:Domain-adversarial training of neural networks. 2016
- C-DANN:Deep domain generalization via conditional invariant adversarial networks,2018
- VRADA:Variational recurrent adversarial deep domain adaptation,2017
行为预测任务的方法3个
- CVAE:Desire: Distant future prediction in dynamic scenes with interacting agents,2017
- GAN:Social gan Socially acceptable trajectories with generative adversarial networks,2018
- GNN:Neural relational inference for interacting systems,2018
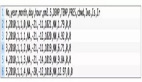
如下表是其中实验定义的域信息:
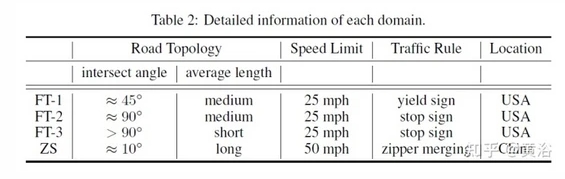
具体图示如下:

本文虽然展示了提出的用于车辆意图预测任务的域泛化方法性能,但CTSDG方法也可以直接或间接地用于轨迹预测任务。最直接的方法是将轨迹预测问题作为一组不同轨迹的分类,能够a)确保状态空间的预期覆盖级别,b)消除动态不可行的轨迹,以及c)避免模式崩溃问题。此外,意图分类的准确性在回归任务中起着重要作用。与无条件的预测相比,目标/意图条件轨迹预测可以改进智体联合和单个智体的预测。条件预测也可用于规划任务。因此,拥有一个准确域泛化的意图/目标预测器是开发最优轨迹预测器和运动规划器的前提。