













本文经AI新媒体量子位(公众号ID:QbitAI)授权转载,转载请联系出处。
2019年,当百度自动驾驶工程师为Mobileye纯视觉DEMO效果惊叹不已时,不会想到一切来得这么快。
2021年,百度纯视觉L4方案,已经花开两朵,各表一支。
Apollo史无前例的成本48万的量产Robotaxi,背后有百度纯视觉自动驾驶技术的精进和支持。
更明显的,是纯视觉方案以L4实力降维释放于普通乘用车,业内唯一一款“自上而下”的城市领航辅助驾驶方案ANP,已经走在量产路上。
这一切,都来自Apollo Lite,中国唯一L4级纯视觉城市道路自动驾驶闭环解决方案的助力。
Apollo Lite 3年前一叶轻舟启航,却闻两岸“猿声”不止:百度真要抛弃激光雷达?
而在3周年之际,Apollo Lite已过万重山,成了和特斯拉、Mobileye三足鼎立的纯视觉自动驾驶门派。
不管是出于对自动驾驶技术路线的关注,还是对自动驾驶数据融合迭代的探索,Apollo Lite的实践经验和思考沉淀,都能提供独一无二的参考。
而能给出解答的人,最合适的自然就是百度智能驾驶事业群组技术委员会主席、自动驾驶视觉技术实践者王亮博士。
Apollo Lite三周年画像
先来勾勒一下Apollo Lite的三年图景。
Apollo Lite,2019年在计算机视觉顶会CVPR“学术出道”,被一些业内人看做是对特斯拉“腹地的奇袭”。
同年年底,就在北京稻香湖区域的数条城市开放道路上完成了不依赖激光雷达,基于纯视觉感知的自动驾驶闭环路测。
2020年,Apollo Lite晋级北京亦庄L4级别自动驾驶路网,通过与Robotaxi同场竞技打磨视觉感知能力,技术指标和乘坐体验逐步向Robotaxi看齐。
此时,两周岁的Apollo Lite具备了仅用摄像头应对中国复杂道路环境的自动驾驶能力。
同年12月的黄埔Apollo生态大会上,百度宣布将Apollo Lite视觉技术从L4降维至L2+级领航辅助驾驶应用——
打造覆盖“泊车域+行车域”城市全场景一体化智驾解决方案 - Apollo智驾产品ANP(Apollo Navigation Pilot)。
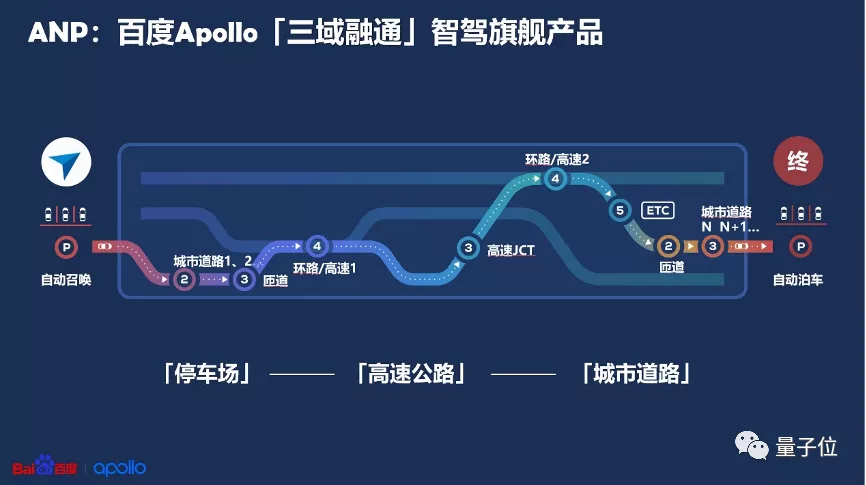
△三域融通智能驾驶产品ANP
2021年,Apollo Lite踏入产品化元年,团队践行L4降维,将技术向更轻量,可量产的方向推进。
这一过程中挑战不少,具体来说,有四重挑战。
首先是前装量产方面。与此前研发使用的后装测试车不同,前装量产对冗余设计、线控调校、散热方案和传感器集成等都是全新的挑战,前装也意味着车辆可靠性、一致性和稳定性都通过了考验。
比如传感器层面,ANP产品新增了前后2颗鱼眼摄像头和12颗超声雷达兼顾低速自动召唤/泊车,而且所有传感器的安装嵌入车身之内,使量产集成度良好。
其次,计算硬件上。Lite从自研计算平台转向低功耗可量产的车规级计算单元,相比为高性能计算任务设计的GPU,AI算力大幅降低。
Lite团队投入大量精力进行了视觉感知模型的轻量化,对模型进行了极致压缩,通过多任务模型、量化训练等手段减少计算量,降低推理时延的同时兼顾了模型预测精度。
比如在某量产项目中,团队攻克batch推理的难题,在低算力车规级芯片上实现了二阶段目标检测网络的实时推理。
第三个挑战是完成L4代码从X86架构到ARM架构迁移。
面对ARM平台腰斩的CPU算力,团队对软件系统进行了大刀阔斧的改造。架构层面做了基于场景化思想的代码重构和功能隔离,系统根据场景和车辆行为动态分配计算资源到不同的传感器/感知任务,从前是算力充沛时的兼顾全局,如今是有限算力下的有的放矢,聚焦局部,计算资源得到更合理的应用。
算法层面全面精简逻辑,通过专用指令优化热点算法模块。
系统层面也重新设计了计算资源调度分配策略,提升数据流转效率。
硬件层面,调配异构计算单元上可用的硬件资源(专用图像处理器、DSP计算单元等),缓解CPU、AI加速器计算压力。通过一系列优化手段,与ARM平台迁移初期相比, CPU占用率降低138%,端到端时延(99分位)降低50%。
最后,Apollo Lite对高精地图的定义和使用方式也做了降级。
此前,Lite仍沿用为Robotaxi专属定制生产的高精地图,图中包含道路拓扑和定位图层信息。
高精地图中的先验信息能够简化车端算法,降低研发难度。
但量产乘用车面对的是更为广阔的路网,高精地图的生产成本和日常维护难度非常大。
这不但限制了地图范围覆盖,而且车端算法重依赖地图也给系统泛化性带来挑战。
针对量产,Apollo Lite放宽对地图精度的要求,同时将地图元素减少到了原来的50%,单位距离地图文件大小仅为原来的10%。
为了在能地图依赖的前提下“看懂”场景,团队还研发了与轻量级地图相适配的感知、定位和决策规划算法,通过车端算法的升级弥补地图信息缺失。
这一系列工作,最终都归为解决用低成本硬件(计算、传感器)带动复杂的L4算法问题,内部研发把这个过程比喻成“小马拉大车”。
这也是Apollo Lite技术降维产品化过程中面临的最大挑战,能做到“以能力补成本”,是Apollo Lite能力演进的最直观体现。
三周年,Apollo Lite助力智驾产品化
百度选择的轻传感器、轻算力、轻地图、强视觉感知路径,看似与时下各家车企和Robotaxi自动驾驶公司频频晒出的高配置“主流”方案相悖,但它却是百度Apollo智驾产品竞争力的壁垒。
基于Apollo Lite视觉自动驾驶技术,百度智驾业务第一个进入市场的产品是AVP(Apollo Valet Parking)自主泊车。
目前已与多家车企定点量产。AVP采用了5颗摄像头+12超声波雷达方案,技术路线以视觉感知为主,已在威马和广汽车型上量产,后续还将持续覆盖长城等品牌的多款车型。
百度通过提升视觉感知能力,不断探索减少自动驾驶对高成本激光雷达的依赖。今年推出的第五代Robotaxi共享无人车成本仅为48万,可谓是前无古人把RoboTaxi做到了驾驶员运营出租车的人车成本区间。
成本之所以低,重要因素就是在百度的Robotaxi方案中,仅使用了一颗40线激光雷达与Apollo Lite的环视摄像头配合,整车体验能力却超越一众搭载四五颗激光雷达和数十颗摄像头的Robotaxi竞品。
百度Robotaxi技术理念的特殊之处在于其致力于持续提升视觉在感知系统中的作用占比。
得益于Apollo Lite的技术积累,视觉能力做强了才有在传感器成本上做减法的信心和资本,在行业内对激光雷达使用做到肉眼可见的个数最少,线数最低,形成了百度在整车成本上的绝对优势。
这一切背后的逻辑是全力降低Robotaxi车辆的BOM成本,加速跑通商业化。

△仅使用一颗激光雷达的第五代共享无人车Apollo Moon
如今再回想起做Apollo Lite的缘起,王亮依然清楚地记得这背后的权衡和博弈。
2016年,百度自动驾驶事业部内展开过一场讨论。待决策的问题只有一个,百度自动驾驶采用重视觉还是重激光雷达路线?
出于让各算法模块快速上路迭代的目的,百度选择了激光雷达为主的技术路线。而为了聚焦,当时并没有分资源投入纯视觉路线研发。
激光雷达路线成为百度一块招牌同时,也带来问题:
成本。
在过去很长一段时间内,全球范围内能提供高线束机械式旋转激光雷达的只有Velodyne一家,成本高昂产量小。
对于百度这种TOP级玩家来说,成本和产能限制了车队规模,也就限制了迭代速度,百万起步的乘用车显然更难起量。
所以2019年,百度内部终于下决心成立团队纯视觉方案做起来,既为追赶先进,也为商业化准备弹药。
Apollo Lite成立第一天就明确性能指标和L4级Robotaxi对齐,形成和激光雷达团队并行的两条路线。
回忆起技术路线选择,王亮给出百度的思考:无人驾驶的规模化落地是一次长征,除了有笃定的信念支撑,更要基于正确的路线才能到达目的地。
他还不无感慨地分享:正是当年从以色列传来的Mobileye纯视觉DEMO,坚定了大家对视觉路线的决心。
就这样,在2019年,一个还不到20人的团队启动,开始了Apollo Lite的征途。
ANP因何生而不同?
2021年,城市场景已成各车企领航辅助驾驶功能的必争之地。
特斯拉纯视觉FSD功能在美国逐步小批量推送,渐进测试;Mobileye将自家纯视觉驾驶方案带到纽约和印度最复杂的街道DEMO演示。
国内多家新势力公布的城市方案趋向拥抱半固态激光雷达,这背后既有对安全的重视,也从侧面印证了纯视觉方案在中国道路场景下的进入门槛极高,绝非普通玩家敢于挑战。
百度主打的ANP(Apollo Navigation Pilot)智驾产品以Apollo Lite视觉方案为基础,融通泊车域和行车域下的多类驾驶场景,实现“点到点(door-to-door)”的智能驾驶功能,同时为用户带来安全、平稳、连贯的驾驶体验。
由于不强依赖激光雷达,ANP利于车企优化硬件成本,更经济的获得城市领航辅助驾驶功能。
同时基于百度多年在Robotaxi项目上对激光雷达的使用经验/技术积累,ANP也可根据车企不同级别车型的定位和智能化预算,选配激光雷达用以提升工况并获得更先进的驾驶能力。
作为百度智驾旗舰产品,ANP核心产品优势是什么?自研纯视觉方案,为何国内只有百度能与特斯拉、Mobileye一战?

△视觉感知融合方案ANP研发测试车
安全
ANP是业内唯一来自L4技术降维的高级辅助驾驶产品,核心算法经过Robotaxi长期实路验证。
百度目前已积累超过2000万公里的L4级真实道路测试里程,此外10亿公里仿真测试里程对每行代码更新做详尽的回归测试,两项业内领先的基础数据,成为ANP驾驶策略安全的基石。
相比特斯拉等企业采用“影子模式”让用户充当测试人员的方式不同,百度Robotaxi测试聘用经过专业认证的自动驾驶测试人员,有科学严谨的测试体系对自动驾驶边界能力进行测试评估。
熟路
应对中国复杂城市道路情况下的种种挑战,短期完全脱离高精地图的技术路线并不现实。
百度身为头部图商,拥有地图测绘资质和成熟的高精地图产线,同属一个部门下的地图团队与算法策略团队能够紧密配合,共同定义适配ANP策略的地图产品和制作更新流程。Apollo Lite“轻地图”的技术路线能够保证ANP在未来的地图路网覆盖率和产品可用性上有显性优势。
开放
ANP系统内置的数据回收策略能够在车端动态对高价值数据进行实时挖掘和存储,数据在合适时间通过wifi/4G回传到服务器,且每类数据与对应的车端模型或者策略关联在平台统一管理。
之后,通过分析工具和标注服务,原始数据被转化为可以参与模型/策略迭代的标准结构化数据。
依托百度多年在仿真技术和数据闭环方向上的实践积累,ANP如今能为客户提供与之配套的数据服务,支持车企内部研发人员通过平台参与到整车智驾能力的持续演进提升中,参与的媒介是百度提供的一系列工具链系统和云端服务。
通过数据服务,ANP也能与客户间的界面更加透明,客户能够低成本、低门槛的参与ANP的能力进化,在数据的驱动下形成产品的差异化体验和竞争力。
如何评价Apollo Lite这3年?
Apollo Lite3周年的速度和成绩,其实不难理解,更重要的是,怎么看待Apollo Lite给自动驾驶行业带来的改变?
其实概括起来很简单,就是一套性能可以和L4级RoboTaxi媲美的纯视觉智能驾驶解决方案。
而且最重要的,这套方案轻传感器、轻算力、强感知能力的方案具备了高性价比的量产能力,足够物美价廉,真正让国内车厂有了和特斯拉对抗的“弹药”,在眼下特斯拉攻城略地之时,有了反攻的底气。
当然,性价比只是吸引企业的一个因素,Apollo Lite的更大魅力,还在于它身后的Apollo生态。百度的地图、百度的云,百度的车路协同能力,都向合作伙伴开放。
而对于百度自身来说,Apollo Lite 3年来最重要的意义,是率先把领先的技术变成落地的商业产品,从而“反哺”Apollo。
因为量产之后必然推动整个数据闭环转得更快,数据驱动也会不断提高整个百度自动驾驶业务的技术壁垒,为技术迭代带来正反馈。

△ANP-Robotaxi架构实现技术降维与数据反哺
最后,在通向完全无人驾驶的终极目标道路上,百度率先领悟了纯视觉路线“心法”,在底层算法层面打开突破口。
数年的技术实践和研发投入,不仅使百度顺利切入智能汽车赛道,也成就了另一条激光雷达方案,以最低成本实现RoboTaxi,恰好从另一个角度解释了激光雷达路线在特定历史时期的合理性。
而很有可能,通往终局的路上,纯视觉路线、激光雷达路线最终会回归、合流。
百度的Apollo Lite团队,3年来完成的是充满困难但极具前瞻性的事情;从成果来看,其价值开始凸显;而从终极目标来看,Apollo Lite的长远价值和意义,才刚刚拉开序幕。
















