近日来,智能汽车事故频发,且事故原因多与所谓的“自动驾驶”功能有关,这不由得引起了人们对“自动驾驶”发展前景的担忧。
实际上,大众理解的“自动驾驶”与官方的定义可能有所出入。全球公认的标准一般是由SAE International(美国汽车工程师学会)发布的J3016自动驾驶等级,该标准定义了汽车从无自动化(L0)到全自动化(L5)的六个驾驶级别。
与此相对应,2021年8月20日,中国工业和信息化部也发布了《汽车驾驶自动化分级》标准,将于2022年3月1日起实施,详细分类如图1所示。

图1 国标《汽车驾驶自动化分级》
根据这两大标准,公众想象中的“坐在车上什么都不用管”的场景要在L5级才能实现。然而当下,即便是行业先驱特斯拉的AutoPilot(自动辅助驾驶)功能也仅属于L2级,国内蔚来的NOP(领航辅助驾驶)、理想的AD(高级辅助驾驶)以及小鹏的NGP(自动导航辅助驾驶)均属于L2级。在这一等级,无论何时使用驾驶辅助功能,驾驶员都必须处于驾驶状态,必须时刻观察各种情况。其实,这也是目前可以在量产车上搭载的技术上限。
那么,在目前的技术基础上,如何进一步对智能驾驶迭代升级,达成真正意义上的“车路协同”,从而更好地保障安全呢?
1. 数字交通的场景化特性
交通问题是复杂的系统问题,这已经是行业共识,无论是高速发展的智能交通业务,当前如火如荼的车联网或车路协同,包括数字交通,都不是单一产品或单一技术能够覆盖或解决的。那么,对于复杂的交通问题,是不是就没有单一的解决之道?根据我们十余年在智能交通领域的项目落地经验,虽然没有一招制敌的产品或技术,但可以提炼出一个万变不离其宗的分析方法——场景化。
首先,视频是构建交通场景感知的重要技术和方法,却不存在一款能够适应全部环境的摄像机产品,也不存在能认知所有目标行为的泛智能。然而,针对细分场景进行业务目标和环境模型的提炼是完全可以做到的,辅以合适的产品以及智能建模,就能达成预期目标,但与此同时也必须放弃非目标的智能或业务。
其次,交通的复杂性在于环境构成的复杂性,以及交通参与者和可预期交通行为的不确定性。对交通场景进行多层次的细分与归类,能够成功地抽象出环境相对确定,以及交通参与者和预期行为均可以固化的模型。
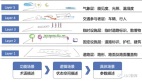
我们将目前有待数字化建设的交通场景按照城市道路、城市停车、桥隧、公路共四个大类(初步)细分出十三类场景及45个模型(非完备集)。针对每个场景模型,以全时、全域、全要素感知为建设目标,以必要、有效、集约为建设原则,分析对应场景模型下的交通问题,构建交通评价指标体系(见图2)。

图2 数字交通系统架构
2. “路侧境况”感知与多维感知构建数字交通基座
车路协同系统中的几个构成要素包括智能车辆、高精地图、路侧感知,同时辅以V2X通信,边缘计算及云计算决策共同协作完成业务落地。我将其抽象为“车-路-况-信-策”五字诀。
- 车:智能车辆本身具有动力控制系统以及环境感知系统,车辆行驶运行中自身的位置、速度、动力参数等称之为“车态”,而车载传感及AI完成车辆所处环境的组织构建,如前后车位置、障碍物、交通标识、信号灯状态灯称为“车辆所处情景”,简称“车景”。
- 路:简单而言,就是高精地图,与我们日常交流中的路相对应,是一段时间内固化的交通通行基础,而数字化的路是车路协调系统呈现与决策的基础。
- 况:单一时刻、场景的路侧感知系统获取到的交通参与者信息及整体交通状况描述,是实际交通过程中瞬时情况的数字映射。同一时刻不同空域场景境况的整体综合描述,构成全域交通资源的利用程度。同一场景在延续时域的境况序列中可以动态呈现周期内的交通效率。
- 信:通信技术,完成V2V、V2I、V2X之间必要数据的传输。
- 策:云端系统可以收集全时、全域的各类信息,综合整理,用于交通态势评估,边缘系统可以半实时决策并推送交通指令。
境况感知是车路协同系统的第一输入,也是唯一实时动态数据,其数据的实时性、完备性、准确性将影响最终车路协同系统决策结果输出的准确性,因此,我们称境况感知系统为数字交通的基座。
而多维融合才能提升系统运行的有效性。
为实现最大化的数字交通系统效用,路侧境况感知系统的建设原则必然是要求“全要素、全空域、全时段”的。
任一场景点位的路侧境况感知系统的构成,可能包含视频、微波、毫米波、激光、RFID、气象环境等多种传感器。其中视频相机、毫米波雷达、激光雷达应该是构建交通境况的主要感知设备:视频可以进行交通参与者特征的识别判定,尤其是对色彩类信息的感知,但视频的作用距离有限,且容易受到光线条件的干扰;毫米波雷达可以判定主要交通参与目标,且能够在较广阔的区域内进行测速、测距,判定交通行为;激光雷达可实现对更精确(厘米级)目标的感知,但是造价较高。
毫米波雷达与激光雷达技术都无法实现对车辆身份特性的识别,多种感知技术在目标检测、运动跟踪、身份识别与标定等方面就具有互补或相斥的情况。对于空域内相邻场景点位的多个路侧境况感知系统,为避免交通对象的跟踪丢失,建设时需要一定的重叠感知覆盖。
只有在尽可能广泛的范围内实现更为精确的交通境况感知,才能为车路协同系统构建更为准确的数字孪生数据。也只有充分认识不同场景交通参与者交通行为的目的差异,才能对自动驾驶车辆提供更为合理的辅助决策。