init阶段
内核启动完是init阶段,源码的路径在 base\startup\init_lite\services\src\main.c,虽然文件夹命名为init_lite,但是init部分的代码是小型系统(small system)和标准系统(standard system)通用的。相关码仓启动模块init进程 (gitee.com)
接下来参考linux内核梳理下启动流程,

1.关闭输入输出
/dev/null,空设备,特殊的设备文件,丢弃一切写入其中的数据(但报告写入操作成功),读取它则会立即得到一个EOF。其作用是对stdin/stdout/stderr进行保护,把文件描述符0,1,2分配出去,以后再分配的时候就不会将stdin/stdout/stderr打开,以达到保护目的。
- // base\startup\init_lite\services\src\device.c
- void CloseStdio(void)
- {
- int fd = open("/dev/null", O_RDWR | O_CLOEXEC);
- if (fd < 0) {
- return;
- }
- dup2(fd, 0);
- dup2(fd, 1);
- dup2(fd, 2);
- close(fd);
- }
2.在串口打印调试信息
写入/dev/kmsg的信息,可以在dmesg(开机信息)中查看。
- // base\startup\init_lite\services\log\init_log.c
- void OpenLogDevice(void)
- {
- int fd = open("/dev/kmsg", O_WRONLY | O_CLOEXEC, S_IRUSR | S_IWUSR | S_IRGRP | S_IRGRP);
- if (fd >= 0) {
- g_fd = fd;
- }
- return;
- }
标准系统空实现,不深究了。
- // base\startup\init_lite\services\src\main.c
- static void PrintSysInfo()
- {
- #ifdef OHOS_LITE
- const char* sysInfo = GetVersionId();
- if (sysInfo != NULL) {
- INIT_LOGE("%s", sysInfo);
- return;
- }
- INIT_LOGE("main, GetVersionId failed!");
- #endif
- }
3.挂载目录,建立索引节点
- // base\startup\init_lite\services\src\device.c
- void MountBasicFs(void)
- {
- mount("tmpfs", "/dev", "tmpfs", MS_NOSUID, "mode=0755"
- mkdir("/dev/pts", S_IRWXU | S_IRGRP | S_IXGRP | S_IROTH | S_IXOTH)
- mount("devpts", "/dev/pts", "devpts", 0, NULL)
- mount("proc", "/proc", "proc", 0, "hidepid=2")
- mount("sysfs", "/sys", "sysfs", 0, NULL)
- mount("selinuxfs", "/sys/fs/selinux", "selinuxfs", 0, NULL)
- }
- void CreateDeviceNode(void)
- {
- mknod("/dev/kmsg", S_IFCHR | DEFAULT_NO_AUTHORITY_MODE, makedev(MEM_MAJOR, DEV_KMSG_MINOR)
- mknod("/dev/null", S_IFCHR | DEFAULT_RW_MODE, makedev(MEM_MAJOR, DEV_NULL_MINOR)
- mknod("/dev/random", S_IFCHR | DEFAULT_RW_MODE, makedev(MEM_MAJOR, DEV_RANDOM_MINOR)
- mknod("/dev/urandom", S_IFCHR | DEFAULT_RW_MODE, makedev(MEM_MAJOR, DEV_URANDOM_MINOR)
- }
4.开启DevKmsg
注释很清楚了,printk_devkmsg默认是流控的,设置为on取消流控。
- // base\startup\init_lite\services\log\init_log.c
- void EnableDevKmsg(void)
- {
- /* printk_devkmsg default value is ratelimit, We need to set "on" and remove the restrictions */
- int fd = open("/proc/sys/kernel/printk_devkmsg", O_WRONLY | O_CLOEXEC, S_IRUSR | S_IWUSR | S_IRGRP | S_IRGRP);
- ...
- write(fd, "on", strlen("on") + 1);
- close(fd);
- fd = -1;
- return;
- }
5.建立Socket文件夹
/dev/unix/socket/不过这个干啥用的,还没搞清楚。
- MakeSocketDir("/dev/unix/socket/", S_IRWXU | S_IRGRP | S_IXGRP | S_IROTH | S_IXOTH);
- // base\startup\init_lite\services\src\device.c
- int MakeSocketDir(const char *path, mode_t mode)
- {
- int rc = mkdir("/dev/unix/", mode);
- ...
- rc = mkdir("/dev/unix/socket/", mode);
- ...
- }
6.Singnal初始化
- // base\startup\init_lite\services\src\init_signal_handler.c
- void SignalInitModule()
- {
- int ret = uv_signal_init(uv_default_loop(), &g_sigchldHandler);
- int ret1 = uv_signal_init(uv_default_loop(), &g_sigtermHandler);
- if (ret != 0 && ret1 != 0) {
- INIT_LOGW("initialize signal handler failed");
- return;
- }
- if (uv_signal_start(&g_sigchldHandler, UVSignalHandler, SIGCHLD) != 0) {
- INIT_LOGW("start SIGCHLD handler failed");
- }
- if (uv_signal_start(&g_sigtermHandler, UVSignalHandler, SIGTERM) != 0) {
- INIT_LOGW("start SIGTERM handler failed");
- }
- }
7.执行命令脚本文件
兼容常规的*.rc文件,是执行linux运行命令的脚本文件。
- // base\startup\init_lite\services\src\init_adapter.c
- void ExecuteRcs()
- {
- #if (defined __LINUX__) && (defined NEED_EXEC_RCS_LINUX)
- pid_t retPid = fork();
- if (retPid < 0) {
- INIT_LOGE("ExecuteRcs, fork failed! err %d.", errno);
- return;
- }
- // child process
- if (retPid == 0) {
- INIT_LOGI("ExecuteRcs, child process id %d.", getpid());
- if (execle("/bin/sh", "sh", "/etc/init.d/rcS", NULL, NULL) != 0) {
- INIT_LOGE("ExecuteRcs, execle failed! err %d.", errno);
- }
- _exit(0x7f); // 0x7f: user specified
- }
- // init process
- sem_t sem;
- if (sem_init(&sem, 0, 0) != 0) {
- INIT_LOGE("ExecuteRcs, sem_init failed, err %d.", errno);
- return;
- }
- SignalRegWaitSem(retPid, &sem);
- // wait until rcs process exited
- if (sem_wait(&sem) != 0) {
- INIT_LOGE("ExecuteRcs, sem_wait failed, err %d.", errno);
- }
- #endif
- }
8.【重要】解析并执行*.cfg文件。
OHOS3.0中的命令脚本文件是*.cfg,采用JSON格式,存储的信息更多一些。前面都是启动系统的一些准备工作,而接下来才是重要部分。还是用个表格来分析。
base\startup\init_lite\services\src\init_read_cfg.c
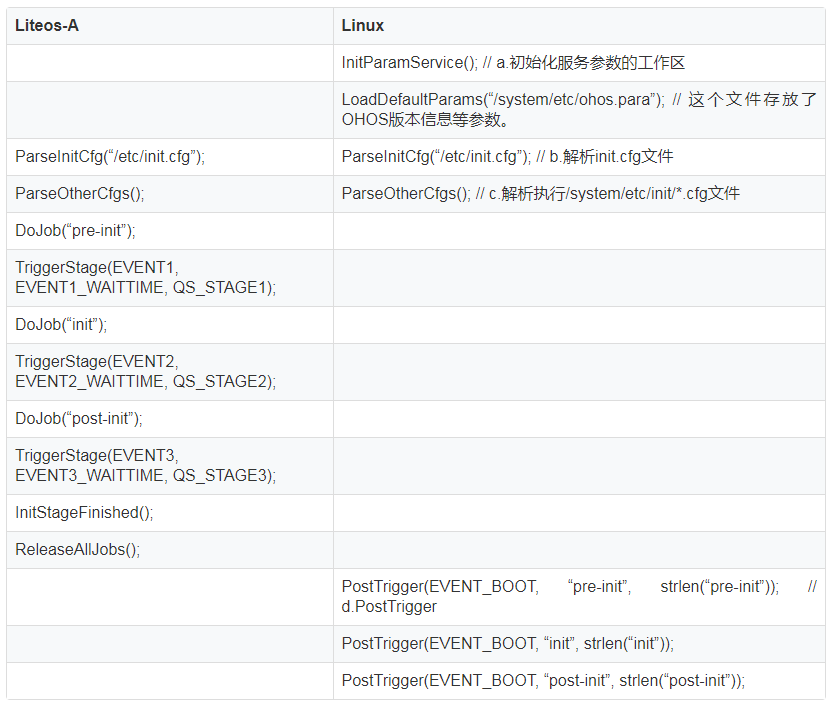
a.初始化服务参数的工作区
- // base\startup\init_lite\services\param\service\param_service.c
- void InitParamService()
- {
- int ret = InitParamWorkSpace(&g_paramWorkSpace, 0, g_initContext);
- PARAM_CHECK(ret == 0, return, "Init parameter workspace fail");
- }
b.解析init.cfg文件
- ./base/startup/init_lite/services/etc/init.cfg
- ./base/update/updater/services/etc/init.cfg
- ./out/ohos-arm-release/packages/phone/system/etc/init.cfg
- ./out/ohos-arm-release/packages/phone/updater/etc/init.cfg
- ./out/ohos-arm-release/obj/base/startup/init_lite/services/base/startup/init_lite/services/etc/init.cfg
- ./out/ohos-arm-release/obj/base/update/updater/services/base/update/updater/services/etc/init.cfg
- ./device/hisilicon/hi3516dv300/updater/init.cfg
编译框架使用的哪个init.cfg还有待确定。
- // base\startup\init_lite\services\src\init_read_cfg.c
- void ParseInitCfg(const char *configFile) // 文件路径"/etc/init.cfg"
- {
- ...
- char *fileBuf = ReadFileToBuf(configFile); // 读取*.cfg文件
- cJSON* fileRoot = cJSON_Parse(fileBuf); // 解析成JSON
- ...
- ParseInitCfgContents(fileRoot);
- ...
- }
- ----------------------------------------------------------------------
- static void ParseInitCfgContents(const cJSON *root) // JSON格式的init.cfg
- {
- ...
- ParseAllServices(root); // ①.解析"services"部分,并执行
- ...
- ParseAllJobs(root); // Liteos走这边
- ParseTriggerConfig(root); // Linux走这边,②.解析"jobs"部分,并执行
- ...
- ParseAllImports(root); // ③.提取init.cfg中"import"的部分,并执行
- }
①.解析"services"部分,并执行
- // base\startup\init_lite\services\src\init_service_manager.c
- void ParseAllServices(const cJSON* fileRoot)
- {
- int servArrSize = 0;
- cJSON* serviceArr = GetArrItem(fileRoot, &servArrSize, "services");
- ... // 截取 init.cfg 中的"services"部分
- ///////////////////////////////// 参考格式
- "services" : [{
- "name" : "ueventd",
- "path" : ["/system/bin/ueventd"],
- "critical" : 1
- }, {
- "name" : "console",
- "path" : ["/system/bin/sh"],
- "disabled" : 1,
- "console" : 1,
- "uid" : "root",
- "gid" : ["shell", "log", "readproc"]
- }]
- ///////////////////////////////// 参考格式
- ... // 默认服务数量不能超过100
- Service* retServices = (Service*)realloc(g_services, sizeof(Service) * (g_servicesCnt + servArrSize));
- ...
- // Skip already saved services,
- Service* tmp = retServices + g_servicesCnt;
- if (memset_s(tmp, sizeof(Service) * servArrSize, 0, sizeof(Service) * servArrSize) != EOK) {
- free(retServices);
- retServices = NULL;
- return;
- }
- // 【重要】然后使用一个for循环遍历服务数组
- for (int i = 0; i < servArrSize; ++i) {
- cJSON* curItem = cJSON_GetArrayItem(serviceArr, i);
- if (CheckServiceKeyName(curItem) != SERVICE_SUCCESS) {
- ReleaseServiceMem(&tmp[i]);
- tmp[i].attribute |= SERVICE_ATTR_INVALID;
- continue;
- }
- int ret = ParseOneService(curItem, &tmp[i]);
- if (ret != SERVICE_SUCCESS) { // 如果服务启动失败
- // release resources if it fails
- ReleaseServiceMem(&tmp[i]);
- tmp[i].attribute |= SERVICE_ATTR_INVALID;
- INIT_LOGE("Parse information for service %s failed. ", tmp[i].name);
- continue;
- } else { // 如果服务启动成功
- INIT_LOGD("service[%d] name=%s, uid=%d, critical=%d, disabled=%d",
- i, tmp[i].name, tmp[i].servPerm.uID, (tmp[i].attribute & SERVICE_ATTR_CRITICAL) ? 1 : 0,
- (tmp[i].attribute & SERVICE_ATTR_DISABLED) ? 1 : 0);
- }
- if (GetServiceSocket(curItem, &tmp[i]) != SERVICE_SUCCESS) {
- if (tmp[i].socketCfg != NULL) {
- FreeServiceSocket(tmp[i].socketCfg);
- tmp[i].socketCfg = NULL;
- }
- }
- if (GetServiceOnRestart(curItem, &tmp[i]) == SERVICE_FAILURE) {
- INIT_LOGE("Failed Get Service OnRestart service");
- }
- }
- // Increase service counter.
- RegisterServices(retServices, servArrSize); // 最后注册服务
- }
- ----------------------------------------------------------------------
- void RegisterServices(Service* services, int servicesCnt)
- {
- if (services == NULL) {
- return;
- }
- g_services = services;
- g_servicesCnt += servicesCnt;
- // 到这里init.cfg中的"services"部分就已经解析并执行完毕了。
- }
②.解析"jobs"部分,并执行
- // base\startup\init_lite\services\param\trigger\trigger_processor.c
- int ParseTriggerConfig(const cJSON *fileRoot)
- {
- ...
- int ret = InitTriggerWorkSpace(&g_triggerWorkSpace); // 初始化触发器的工作空间
- ...
- cJSON *triggers = cJSON_GetObjectItemCaseSensitive(fileRoot, "jobs"); // 提取init.cfg中"jobs"的部分
- ...
- int size = cJSON_GetArraySize(triggers);
- ...
- for (int i = 0; i < size; ++i) {
- cJSON *item = cJSON_GetArrayItem(triggers, i);
- ParseTrigger(&g_triggerWorkSpace, item);
- }
- return 0;
- }
- ----------------------------------------------------------------------
- // 截取init.cfg中jobs段的部分代码,格式如下
- "jobs" : [{
- "name" : "pre-init",
- "cmds" : [
- "write /proc/sys/kernel/sysrq 0",
- ...
- "mkdir /data",
- ]
- }, {
- "name" : "init",
- "cmds" : [
- "copy /proc/cmdline /dev/urandom",
- ...
- "domainname localdomain"
- ]
- }, {
- "name" : "param:sys.boot_from_charger_mode=1",
- "condition" : "sys.boot_from_charger_mode=1",
- "cmds" : [
- "trigger post-init"
- ]
- },
- ...
- ],
- // base\startup\init_lite\services\param\trigger\trigger_manager.c
- int ParseTrigger(TriggerWorkSpace *workSpace, const cJSON *triggerItem)
- {
- ... // 提取init.cfg中jobs段的"name"的部分
- char *name = cJSON_GetStringValue(cJSON_GetObjectItem(triggerItem, "name"));
- ... // 提取init.cfg中jobs段的"condition"的部分
- char *condition = cJSON_GetStringValue(cJSON_GetObjectItem(triggerItem, "condition"));
- int index = GetTriggerIndex(name);
- ...
- u_int32_t offset = 0;
- TriggerNode *trigger = GetTriggerByName(workSpace, name, &offset);
- if (trigger == NULL) {
- offset = AddTrigger(workSpace, index, name, condition);
- PARAM_CHECK(offset > 0, return -1, "Failed to create trigger %s", name);
- trigger = GetTriggerByIndex(workSpace, offset);
- } else {
- if (condition != NULL) {
- PARAM_LOGE("Warning parseTrigger %s %s", name, condition);
- }
- }
- PARAM_LOGD("ParseTrigger %s %u", name, offset);
- // 添加命令行
- cJSON* cmdItems = cJSON_GetObjectItem(triggerItem, "cmds"); // 提取init.cfg中jobs段的"cmds"的部分
- ...
- int cmdLinesCnt = cJSON_GetArraySize(cmdItems); // 获取命令数量
- ...
- for (int i = 0; i < cmdLinesCnt; ++i) { // 循环执行
- char *cmdLineStr = cJSON_GetStringValue(cJSON_GetArrayItem(cmdItems, i));
- ...
- size_t cmdLineLen = strlen(cmdLineStr);
- const char *matchCmd = GetMatchCmd(cmdLineStr);
- if (matchCmd == NULL && strncmp(cmdLineStr, "trigger ", strlen("trigger ")) == 0) {
- matchCmd = "trigger ";
- }
- ...
- size_t matchLen = strlen(matchCmd);
- if (matchLen == cmdLineLen) {
- offset = AddCommand(workSpace, trigger, matchCmd, NULL);
- } else {
- offset = AddCommand(workSpace, trigger, matchCmd, cmdLineStr + matchLen);
- }
- PARAM_CHECK(offset > 0, continue, "Failed to add command %s", cmdLineStr);
- }
- return 0;
- }
③.提取init.cfg中"import"的部分,并执行
- // base\startup\init_lite\services\src\init_import.c
- void ParseAllImports(const cJSON *root)
- {
- ///////////////////////////////// 参考格式
- "import" : [
- "/etc/init.usb.cfg",
- "/etc/init.usb.configfs.cfg",
- "/etc/init.usb.cfg",
- "/etc/init.Hi3516DV300.usb.cfg",
- "/etc/init.Hi3516DV300.cfg"
- ],
- /////////////////////////////////
- cJSON *importAttr = cJSON_GetObjectItemCaseSensitive(root, "import"); // 提取init.cfg中"import"的部分
- ...
- int importAttrSize = cJSON_GetArraySize(importAttr);
- for (int i = 0; i < importAttrSize; i++) { // 循环取出每一项
- cJSON *importItem = cJSON_GetArrayItem(importAttr, i);
- ...
- char *importContent = cJSON_GetStringValue(importItem);
- ...
- // Only OHOS L2 support parameter.
- #ifndef OHOS_LITE //这里有啥意义,前面都已经判断过了
- if (ExtractCfgFile(&cfgFile, importContent) < 0) {
- INIT_LOGW("Failed to import from %s", importContent);
- if (cfgFile != NULL) {
- free(cfgFile);
- cfgFile = NULL;
- }
- continue;
- }
- #else
- cfgFile = importContent;
- #endif
- INIT_LOGI("Import %s...", cfgFile);
- ParseInitCfg(cfgFile); // 取出"import"中的路径,解析方法和init.cfg解析方式一致。
- ...
- }
- INIT_LOGD("parse import file done");
- return;
- }
到这里init.cfg就解析并执行完毕了,需要注意的是,import导入的cfg文件是最后才执行的。
c.解析执行/system/etc/init/*.cfg文件
和import的原理类似,遍历system/etc/init文件夹下的*.cfg文件,并执行。我感觉写在init.cfg的import中应该也是可以的。
- // base\startup\init_lite\services\src\init_read_cfg.c
- static void ParseOtherCfgs()
- {
- ReadCfgs("/system/etc/init");
- return;
- }
- ------------------------------------
- static void ReadCfgs(const char *dirPath)
- {
- DIR *pDir = opendir(dirPath);
- ...
- struct dirent *dp;
- while ((dp = readdir(pDir)) != NULL) {
- char fileName[FILE_NAME_MAX_SIZE];
- if (snprintf_s(fileName, FILE_NAME_MAX_SIZE, FILE_NAME_MAX_SIZE - 1, "%s/%s", dirPath, dp->d_name) == -1) {
- INIT_LOGE("ParseCfgs snprintf_s failed.");
- closedir(pDir);
- return;
- }
- struct stat st;
- if (stat(fileName, &st) == 0) {
- if (strstr(dp->d_name, ".cfg") == NULL) {
- continue;
- }
- INIT_LOGI("ReadCfgs :%s from %s success.", fileName, dirPath);
- ParseInitCfg(fileName); // 和init.cfg同样的解析方式
- }
- }
- closedir(pDir);
- return;
- }
d.PostTrigger
PostTrigger(EVENT_BOOT, “pre-init”, strlen(“pre-init”));
- // base\startup\init_lite\services\param\trigger\trigger_processor.c
- void PostTrigger(EventType type, const char *content, u_int32_t contentLen)
- {
- ///////////////////////////////////// 参考TriggerDataEvent
- typedef struct {
- uv_work_t request;
- EventType type;
- u_int32_t contentSize;
- char content[0];
- } TriggerDataEvent;
- /////////////////////////////////////
- ...
- TriggerDataEvent *event = (TriggerDataEvent *)malloc(sizeof(TriggerDataEvent) + contentLen + 1);
- ...
- event->type = type; // = EVENT_BOOT
- event->request.data = (void *)((char*)event + sizeof(uv_work_t));
- event->contentSize = contentLen; // = strlen("pre-init")
- event->content[contentLen] = '\0'; // "pre-init"[strlen("pre-init")],设置结束符'\0'
- SendTriggerEvent(event);
- ...
- }
- ----------------------------------------------------------------------------
- static void SendTriggerEvent(TriggerDataEvent *event)
- {
- ....
- int ctrlSize = strlen("sys.powerctrl=");
- if (strncmp(event->content, "sys.powerctrl=", ctrlSize) == 0) { // 如果event->content为"sys.powerctrl="
- char *cmdParam = NULL;
- const char *matchCmd = GetCmdInfo(event->content + ctrlSize, event->contentSize - ctrlSize, &cmdParam);
- if (matchCmd != NULL) {
- DoCmdByName(matchCmd, cmdParam);
- } else {
- PARAM_LOGE("SendTriggerEvent cmd %s not found", event->content);
- }
- } else if (strncmp(event->content, "ohos.ctl.start=", strlen("ohos.ctl.start=")) == 0) { // 如果是"ohos.ctl.start="
- DoCmdByName("start ", event->content + strlen("ohos.ctl.start="));
- } else if (strncmp(event->content, "ohos.ctl.stop=", strlen("ohos.ctl.stop=")) == 0) { // 如果是"ohos.ctl.stop="
- DoCmdByName("stop ", event->content + strlen("ohos.ctl.stop="));
- } else { // 否则执行uv_queue_work(),uv_queue_work是将ProcessEvent提交给子线程执行,完成后通知主线程,防止阻塞
- uv_queue_work(uv_default_loop(), &event->request, ProcessEvent, ProcessAfterEvent);
- event = NULL;
- }
- ...
- }
- -----------------------------------------------------------------------
- // base\startup\init_lite\services\src\init_cmds.c
- void DoCmdByName(const char *name, const char *.cmdContent)
- {
- ...
- size_t cmdCnt = sizeof(CMD_TABLE) / sizeof(CMD_TABLE[0]);
- unsigned int i = 0;
- for (; i < cmdCnt; ++i) {
- if (strncmp(name, CMD_TABLE[i].name, strlen(CMD_TABLE[i].name)) == 0) {
- CMD_TABLE[i].DoFuncion(cmdContent, CMD_TABLE[i].maxArg);
- break;
- }
- }
- if (i == cmdCnt) {
- INIT_LOGE("DoCmd, unknown cmd name %s.", name);
- }
- }
9.启动参数服务
使用Libuv库,官网地址。作为Nodejs的底层。
相关的API可以参考网址,uv_run。
- // base\startup\init_lite\services\param\service\param_service.c
- int StartParamService()
- {
- PARAM_LOGI("StartParamService.");
- uv_fs_t req;
- uv_fs_unlink(uv_default_loop(), &req, PIPE_NAME, NULL);
- uv_pipe_t pipeServer;
- int ret = uv_pipe_init(uv_default_loop(), &pipeServer, 0);
- ...
- ret = uv_pipe_bind(&pipeServer, PIPE_NAME);
- ...
- ret = chmod(PIPE_NAME, S_IRUSR | S_IWUSR | S_IRGRP | S_IWGRP | S_IROTH | S_IWOTH);
- ...
- ret = uv_listen((uv_stream_t*)&pipeServer, SOMAXCONN, OnConnection);
- ...
- uv_run(uv_default_loop(), UV_RUN_DEFAULT); // 运行事件循环,直到不再有活动和引用的句柄或请求。
- ...
- }
至此,init启动结束,进入pause()。总结下来init首先会执行一些通用的准备操作,同时兼容常规linux内核启动脚本,之后在执行鸿蒙init.cfg和单板相关*.cfg。以上分析都是我个人见解,如有错误欢迎指正。