对大多数人来说,将一个物体叠加在另一个物体上是一项简单的任务。但即使是最复杂的机器人也很难同时处理多个这样的任务。这是因为堆叠需要一系列不同的运动、感知和分析技能,包括与不同种类物体互动的能力。这项任务的复杂程度已使其成为机器人领域的重大挑战。
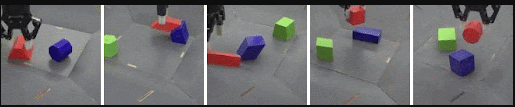
DeepMind的一组研究人员认为,要推进机器人堆叠技术的发展,需要一个新的基准。在将于2021年在机器人学习大会(CoRL 2021)上发表的一篇论文中,他们介绍了RGB-Stacking,即让机器人学习如何抓住不同的物体,并让它们在另一个物体上保持平衡。虽然在文献中已经有了堆积任务的基准,但研究人员断言,他们的研究之所以与众不同,是因为所使用的对象的多样性,以及为验证他们的“发现”而进行的评估。研究人员在论文中写道,结果表明,模拟和真实数据的结合可以用来学习“多对象操作”。
研究人员表示:“为了支持其他研究人员,我们正在开放模拟环境的一个版本,并发布用于构建真实机器人RGB堆叠环境的设计,以及RGB对象模型和用于3D打印它们的信息。我们还在更广泛地开放用于机器人研究的图书馆和工具。”
据DeepMind的研究人员称,学习过程确保机器人通过对多个对象集的训练获得通用技能。RGB-Stacking故意改变抓取和堆叠的特性,这些特性定义了机器人如何抓取和堆叠每个物体,这迫使机器人表现出超越简单的拾取和放置策略的行为。
随着机器人在堆叠和抓取物品方面变得更加熟练,一些专家认为,这种类型的自动化可能会推动制造业迎来新一轮发展。