













当你凝视机器人时,机器人也在凝视你。
凝视是一种人与人之间的信号,意味着交流、互动、告知自身意图。「当你凝视我时,我就读懂了你的意思,虽然无关言语。」
但当人类与机器人互相凝视时,会发生什么?
意大利技术研究院(Italian Institute of Technology)的研究者发现,人形机器人的凝视会影响人类的神经活动并影响人的决策过程,甚至会造成延迟。机器人的凝视也会让人类将其视为一种社交信号,这些发现拓展了类人机器人的潜在应用领域,比如作为同事、临床支持服务和家庭助理。
这个名为 InStance 的项目研究了「人们在什么时候以及在什么条件下,会将机器人视为有意识的存在。」

论文地址:https://www.science.org/doi/10.1126/scirobotics.abc5044
目前,这项研究发表在《Science Robotics》。论文的作者包括 Marwen Belkaid、Kyveli Kompatsiari、Davide de Tommaso、Ingrid Zablith 和 Agnieszka Wykowska。
在大多数日常情况下,人脑不仅需要参与决策,还需要参与预测他人的行为。凝视可以提供有关他人意图、目标和未来决定的信息。人类会注意别人的眼睛,当有人注视他们或注视环境中的特定事件或地点时,大脑的反应是非常强烈的。现在,研究人员注意到了人与机器人的此类互动。
Marwen Belkaid、Kyveli Kompatsiari、Davide de Tommaso、Ingrid Zablith 和 Agnieszka Wykowska(团队负责人)。图源:IIT-Istituto Italiano di Tecnologia。
该研究的首席研究员兼论文主要作者 Agnieszka Wykowska 说「机器人将越来越多地出现在我们的日常生活中,因此我们不仅要了解机器人设计的技术方面,还要了解人机交互的方面。」
该研究团队让 40 名参与者与机器人 iCub 玩一种策略游戏,以测量参与者的行为和神经活动,后者使用脑电图(EEG)。该游戏模拟两名驾驶员在汽车碰撞过程中相互接近,其结果取决于玩家是偏离还是继续直行。
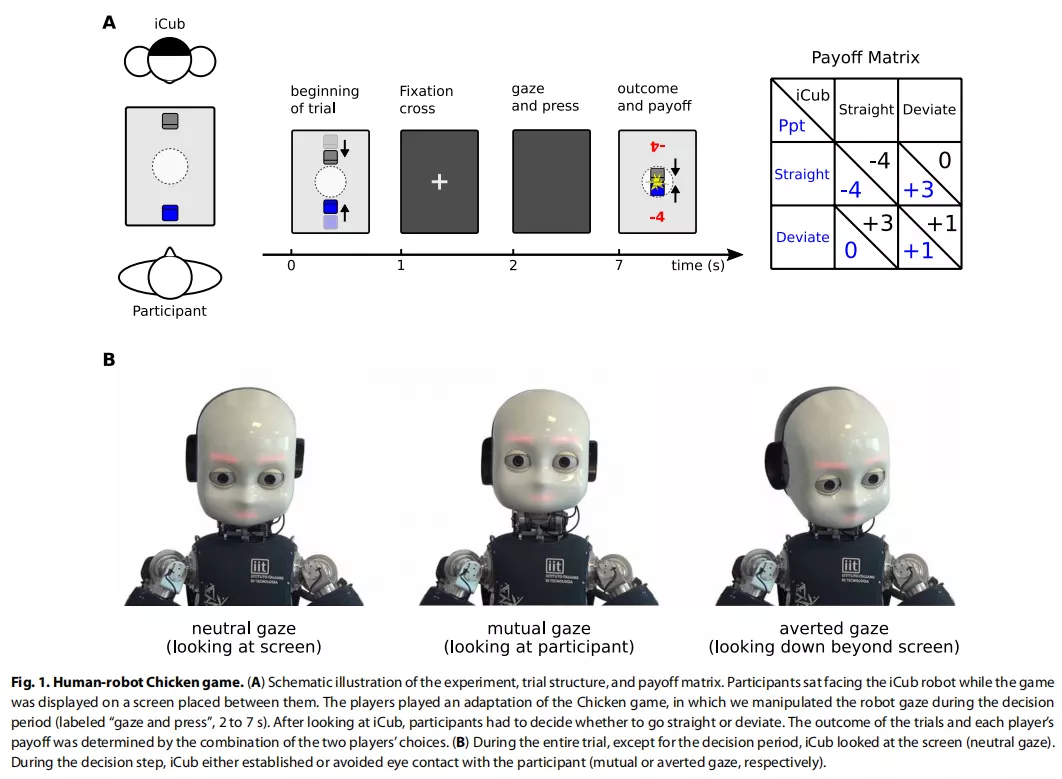
在这个游戏的实验中,两位玩家(即参与者和机器人)之间的桌子上有一个操纵游戏的机器(图 1A)。游戏中每个玩家各操纵一辆汽车。汽车相互靠近,在即将相撞时,游戏黑屏 5 秒,双方玩家都必须选择直行或偏离。实验中最关键的一点是参与者被要求注视着机器人,而机器人 iCub 的视线则包括以下两种情况:
直视参与者,即两位玩家相互凝视;
iCub 向旁边看来避免眼神接触,即回避凝视。
双方玩家都有一个遮挡物覆盖他们的动作按钮,从而防止对手预测他们的选择。游戏中可能的结果是:
- 两者都直走并碰撞,这种情况两者的损失最高;
- 两者都偏离,获得最高的联合收益;
- 只有一个直行,获得最高的个人收益。
研究人员发现,当 iCub 呈 mutual gaze 状态,即与参与者相互凝视时,参与者会变得反应缓慢。延迟反应可能表明相互凝视与更高的认知努力有关。参与者的凝视一方面会对 iCub 的选择进行更多推理,另一方面可能增加与任务无关的凝视刺激抑制程度。
试想一下和机器人玩扑克的场景,当你需要决定下一步做什么时,机器人会看着你,然后当机器人移开视线时,它会做出决定。Wykowska 表示:人类玩家的大脑也需要通过一个费力且代价高昂的过程来试图「忽略」机器人的凝视。
这些结果表明:机器人的视线「劫持」了人脑的「社会认知」机制,导致机器人会做出如同社交智能体的反应。从这个意义上说,机器人的「社交」并不总是对人类有益,即使与机器人交互很有趣,但是会阻碍人类决策的性能和速度。
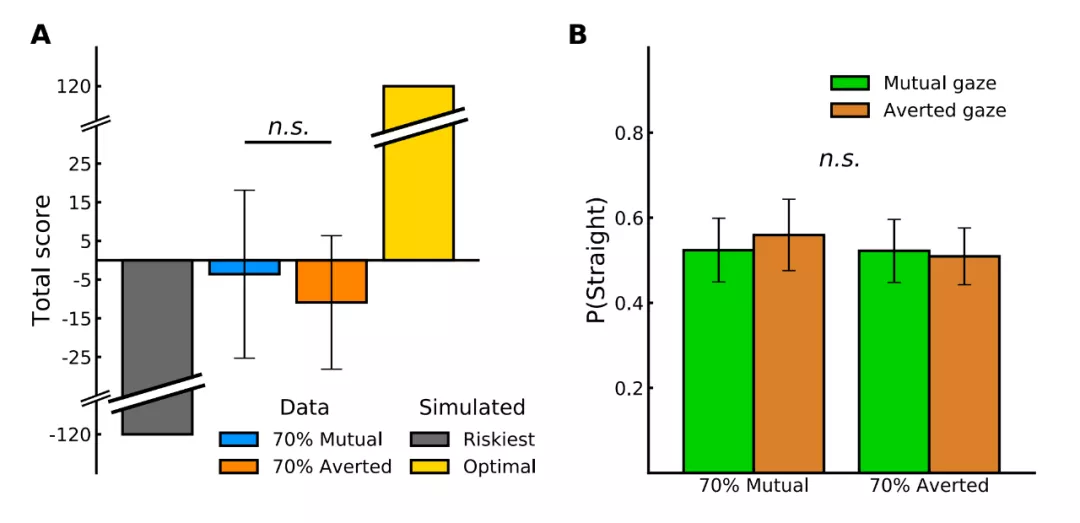
参加者的表现及回应时间。
参与者为了推理 iCub 的行为运用了一些计算模型。下图 (a) 为模型示意图。强化学习模型(RL)根据最近选择的行动及其结果做出决定;虚拟游戏模型 (Fic) 根据游戏的 payoff 矩阵和对对手行为的预测做出决策;Inf 模型也是如此,同时假设对手也在预测玩家的选择,并将它自身行为对于对手决策预测的影响加以合并。下图 (b) 表明与参与者的选择相符的影响模型的整体对数似然比明显比其他两个模型更大,暗示了在游戏中 iCub 的高层次推理。
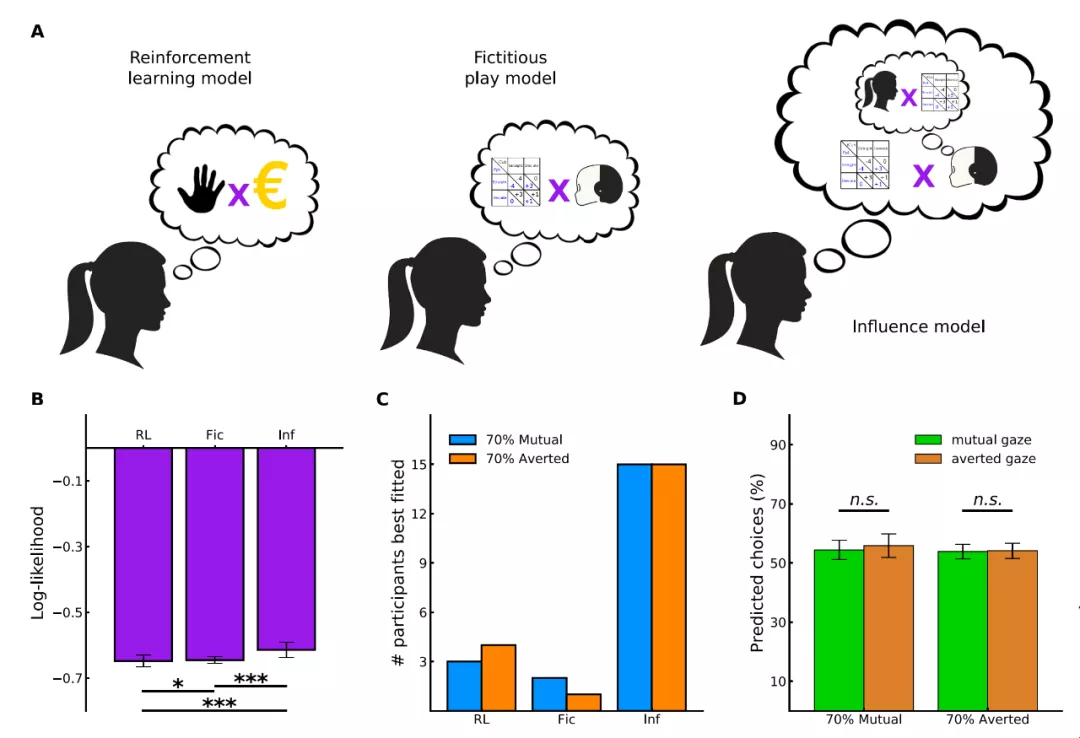
参与者对 iCub 行为推理的计算模型。
Wykowska 和她的研究小组希望这些发现能帮助机器人工程师设计在特定应用环境中表现出最合适行为的机器人。比如,具有社交行为的类人机器人可能用于老人及儿童看护,像 iCub 机器人一样,这是自闭症治疗实验性治疗的一部分。但从另一方面看,当你需要专注于一项任务时,例如工厂设置或空中交通管制,散发社交信号的机器人却可能会分散注意力。


















