












本文经AI新媒体量子位(公众号ID:QbitAI)授权转载,转载请联系出处。
机器人的部件通信中断后,还能正常做动作吗?
这里的部件,指传感器、通信总线、控制电路,是机器人运动的核心。
现在,一群来自EPFL的科学家在观察鳗鱼后,得出结论:可以!
他们模拟鳗鱼的结构,造了个“通信中断也能继续运动”的机器人,极大地提升了机器人的运动能力。

研究已经登上Science Robotics封面:

一起来看看。
控制&传感器中断,也能做动作
通常来说,如果动物的脊髓 (中枢神经系统)被截断,就会出现对应的肢体瘫痪。
即使是脊椎动物(如大部分鱼类),切断脊髓后也无法协调动作,运动能力严重下降。
但鱼类中的鳗鱼,在被砍断一半后,下半身还能做出游泳的动作。

△从砧板上溜走的一截鳗鱼
这引起了科学家们的兴趣:能否给机器人也整一个?
机器人通常全靠“大脑”(总控制系统)来控制动作,一旦总控信号中断,就会导致全身“瘫痪”;如果掌握鳗鱼的运动技巧,就能让运动控制变得更简单。
对鳗鱼进行分析后,研究人员发现了它的两点特征:
其一,通过周围神经系统,来感知环境并协调运动;其二,通过中枢神经系统,用一组神经元(神经振荡器)产生规律的肌肉活动来抵御通信中断。
根据这两个特征,科学家们设计了一个波动式游动的“鳗鱼”机器人。
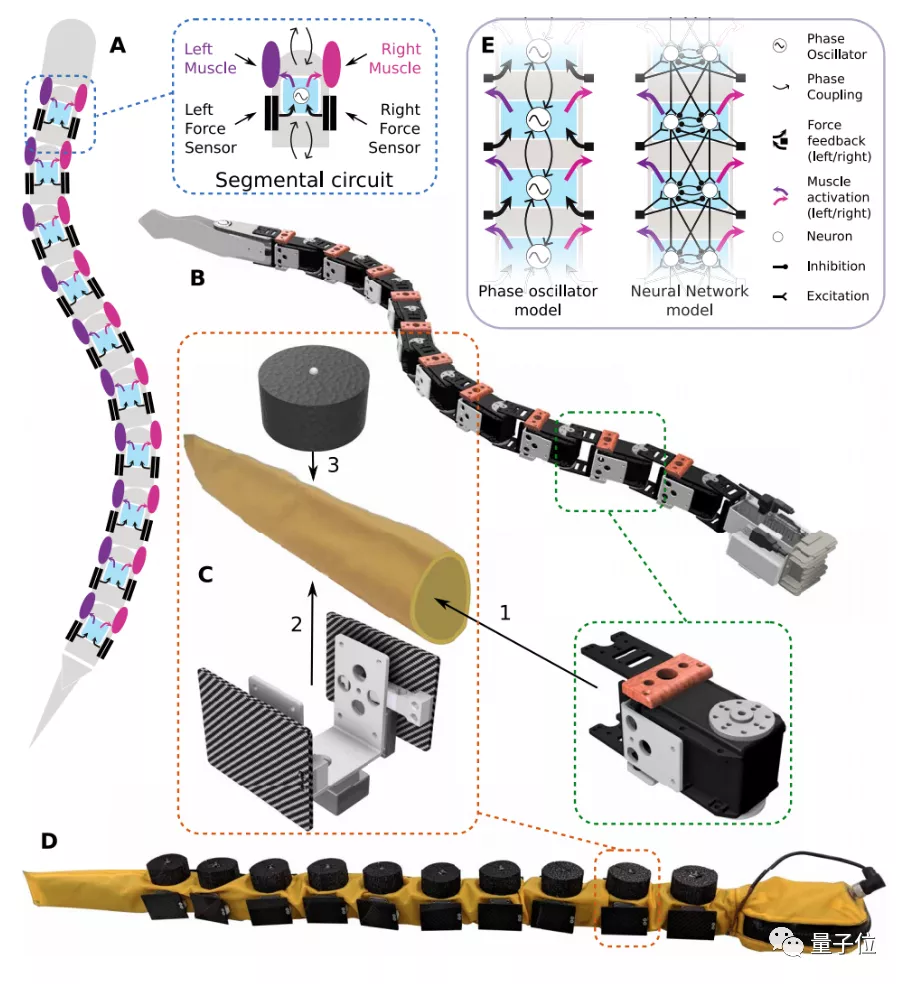
首先,环境感知部分,即机器人的“周围神经系统”。
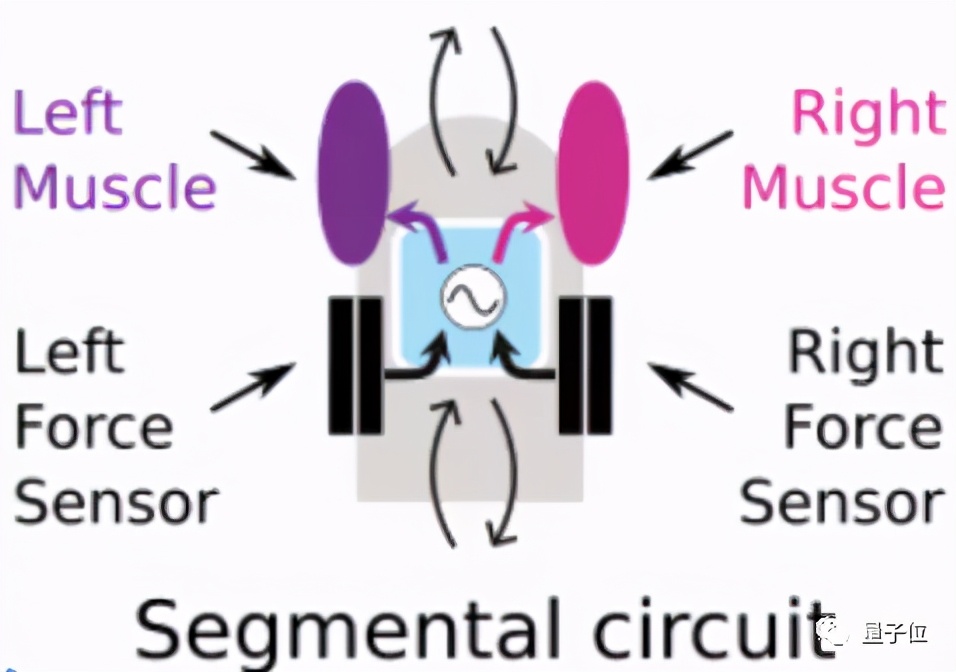
研究人员设计了一组由通信电路、带有放大器的测压元件和纤维板构成的力学传感器,作为机器人的“感应皮肤”,用来感知水中的动力。
这组力学传感器被磁铁固定在机器人的外侧,与相邻模块连接,最终与头部相连,它会将信号反馈给神经元,以此控制左右侧“肌肉”的运动。
每个模块的顶部,还有一个浮动元件,用于运动跟踪。
力学传感器和浮动元件,共同构成了机器人的“皮肤”(图中黄色防水布外围的黑色部件),机器人通过它们感知到水流压力,实现贴着障碍物游动、同时避免撞上障碍物的效果。
然后,控制运动部分,即机器人的“中枢神经系统”。
这部分由10个伺服电机组成,每部分都是一个独立电路,由搭载Linux系统的计算机、电池和被动连接模块组成,构成控制一段肌肉的系统。
各部分控制系统完全独立,即使某一部分损坏,剩下的模块也能根据传感器实现规律的肌肉活动,就像节拍器共振一样:
运动起来非常有节奏感:
然后,再用一层防水泳衣将“中枢神经系统”裹住(外侧的黄色布料),系统就做好了。
这样的“鳗鱼”机器人,真能在控制系统等部件坏掉时,正常运动吗?
可贴墙游动,多次中断也不停
研究人员在2米×6米×0.31米的水池里对机器人进行了测试。
接受测试的结构有4种,分别是无传感器(CPG)、无耦合(前后部件无关联)、无神经振荡器、全功能(论文所提结构)。
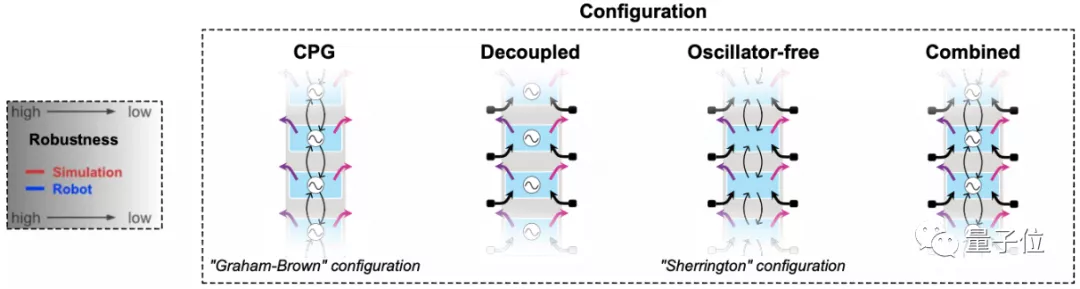
下图是人为短暂中断不同部件的运转后,这几种机器人速度下降的情况(图A~P),其中横轴表示中断次数:
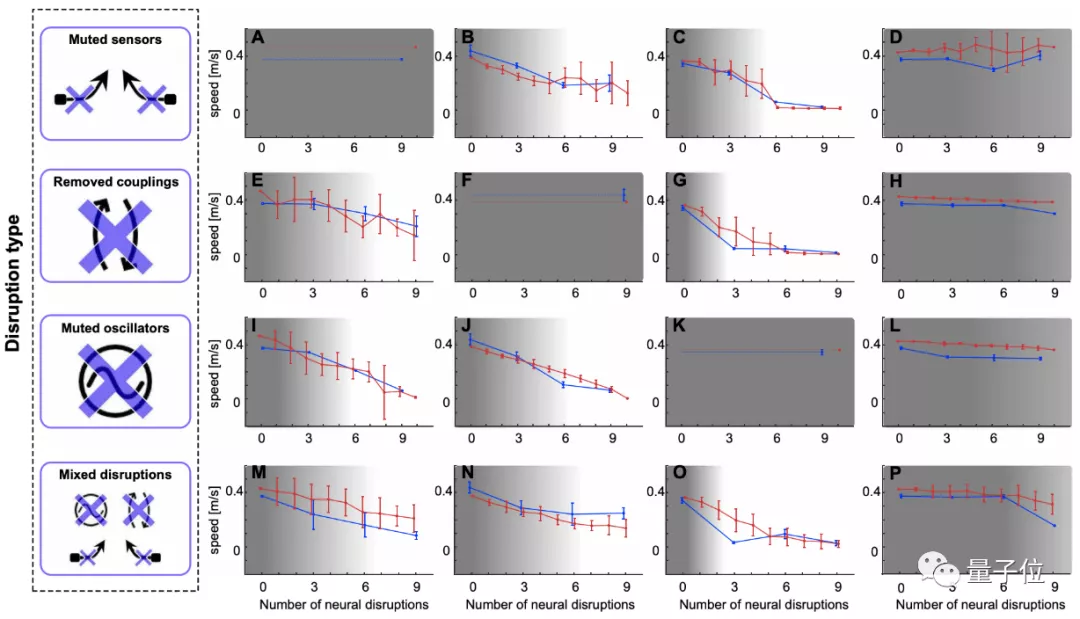
从图中来看,中断类型分为4种:传感器中断、耦合中断、神经振荡器中断和三种部件全部中断。
显然,无论是三种部件全部中断、还是其中一种中断的情况下,这一结构的机器人都要比其他几种机器人架构好得多。
其他类型的几种机器人,在面临多个部件中断的情况下,次数超过9次后速度就已经下降到0。
只有论文介绍的机器人结构,在多部件中断9次后,还能保持0.1m/s以上的速度。
这也表明,论文中提出的机器人即使在“中枢神经系统”(总控)和“周围神经系统”(传感器)中只有一个起作用的情况下,也能保持几乎不变的运动速度。
只有在总控和传感器同时、多次中断的情况下,机器人的速度才会缓慢下降。
这项研究对于可重构和模块化机器人非常有用,也能用于搜救和环境监测中,提高了机器人的鲁棒性。
作者介绍
一作Robin Thandiackal,本科毕业于ETH(苏黎世联邦理工学院),博士毕业于EPFL(洛桑联邦理工学院),目前在哈佛大学进行博士后工作。
共同一作Kamilo Melo,曾经在EPFL进行博士后工作,此后创立机器人公司KM-RoBoTa,同时仍然与EPFL进行学术合作。
其他的8名作者,则分别来自EPFL、法国南特大学数字科学实验室(LS2N)、日本东北大学、舍布鲁克大学。
除了研究鳗鱼机器人以外,Kamilo Melo的公司还研究过抗摔抗掉落的蛇形机器人:

论文地址:
https://robotics.sciencemag.org/content/6/57/eabf6354

















