












弗吉尼亚大学教授 Dan Quinn 和博士后钟强结合生物力学、流体力学和机器人学揭秘了如何利用动态弹性调节实现高性能游动,研究已登上最新一期《Science Robotics》。
机器金枪鱼尾部内置的弹性调节执行器能根据当前游动速度实时调节尾部弹性。来源:Qiang Zhong(钟强),Daniel Quinn /University of Virginia.
传统的螺旋桨驱动水下潜航器系统能在特定的设计巡航速度下保持较高的推进效率,但通常无法同时在高速和低速下保持高推进效率。相对比之下,自然界的鱼类却能够在较大的速度范围内保持极高的游动效率。而其中的关键因素便是鱼类那由肌肉构成的柔性身体。受此启发,过去的研究人员开发了一些模仿鱼类的柔性机器鱼系统,如通过柔性液压驱动器、柔性仿生肌腱来模仿鱼体的解剖学结构。然而,如何选择合适的弹性设计却是一大难题。
不恰当的弹性结构设计会降低机器鱼的游动性能,其推进速度和效率也往往远不及生物学原型。机器鱼尾部的刚度就如同自行车上的换挡齿轮。固定弹性(刚度)设计的机器鱼就像是一台不能变速的自行车,仅仅一小段山路就足以令人精疲力竭。但通过变速机构,我们则可以针对不同骑行路况选择最优挡位来节省体力。全面且细致地研究尾部弹性对于游动性能的影响及其背后的流体力学机理,对于未来高性能仿生水下潜航器的开发至关重要。
在最新一期《Science Robotics》的文章中,来自弗吉尼亚大学的教授 Dan Quinn 和博士后钟强结合生物力学、流体力学和机器人学揭秘了如何利用动态弹性调节实现高性能游动。该研究介绍了一种具有动态尾部弹性调节功能的机器金枪鱼平台,能够根据当前的游动速度通过可编程的人造肌腱自动调节尾巴刚度。通过动态弹性调节,该机器金枪鱼在实验中实现了更大的游动速度调节范围的同时实现了接近 100% 的推进效率增长。这种动态弹性调节方法解决了目前柔性仿生机器鱼的性能瓶颈,并为将来开发高频率、高速的大型仿生水下潜航系统提供了新的解决方案。

论文地址:https://robotics.sciencemag.org/content/6/57/eabe4088
材料硬度难以把控?
不如学鱼类自行调节尾部「硬度」
生物学研究认为,鱼类在通过自身肌肉驱动尾部摆动的同时,部分肌肉也被应用于身体弹性调节以实现高推进效率。金枪鱼通过肌肉控制贯穿全身的肌腱系统来调节尾巴弹性。但由于其结构特性,我们没有办法直接在活的金枪鱼体上测试动态弹性调节对于游动性能的影响。
为了探索金枪鱼在变速游动中的弹性调节机理以及其背后的流体力学原理,我们以金枪鱼解剖结构为原型并将其建模,基于此设计了机器金枪鱼平台。不同于此前的仿生学研究偏向于模仿鱼体结构及游动姿态,我们刻意地减少了鱼体结构复杂度以专注于研究尾部弹性对于游动性能的影响。除此之外,我们还配套开发了高频率驱动装置来驱动机器金枪鱼,以达到类似真实金枪鱼的游动频率(7 赫兹左右)。
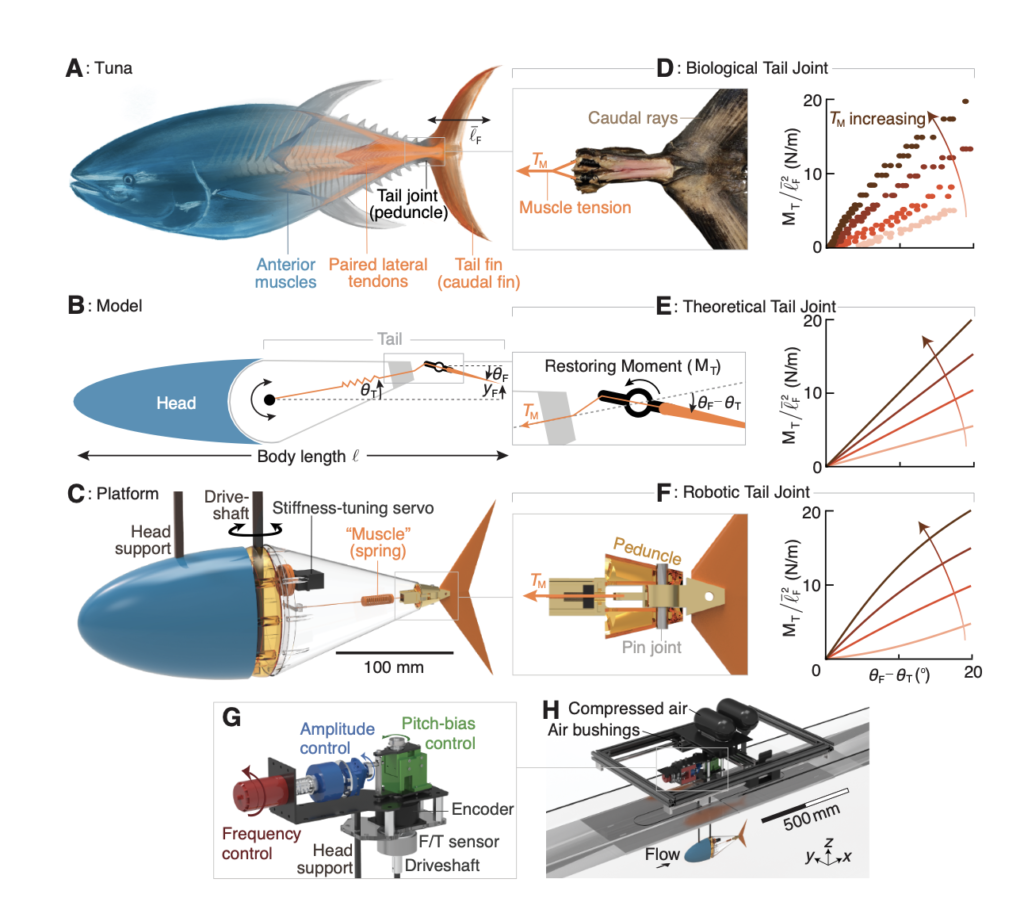
基于真实金枪鱼结构和简化数学建模设计机器金枪鱼。
结合流体力学与机器人学,来看看游动的鱼尾如何变「硬」
在这个研究中,我们结合机器人学和流体力学,同步从流体力学建模和实验两个方向入手来全面探索动态弹性调节对于游动性能的影响。通过结合鱼体的动力学模型和非定常空气动力学模型(Theodorsen Model), 我们能够用数学模型对动态弹性调节和鱼体游动性能做出预测。除此之外,我们还开发了一套智能化的信息物理实验系统,并在我们设计的机器金枪鱼上开展了大量实验。
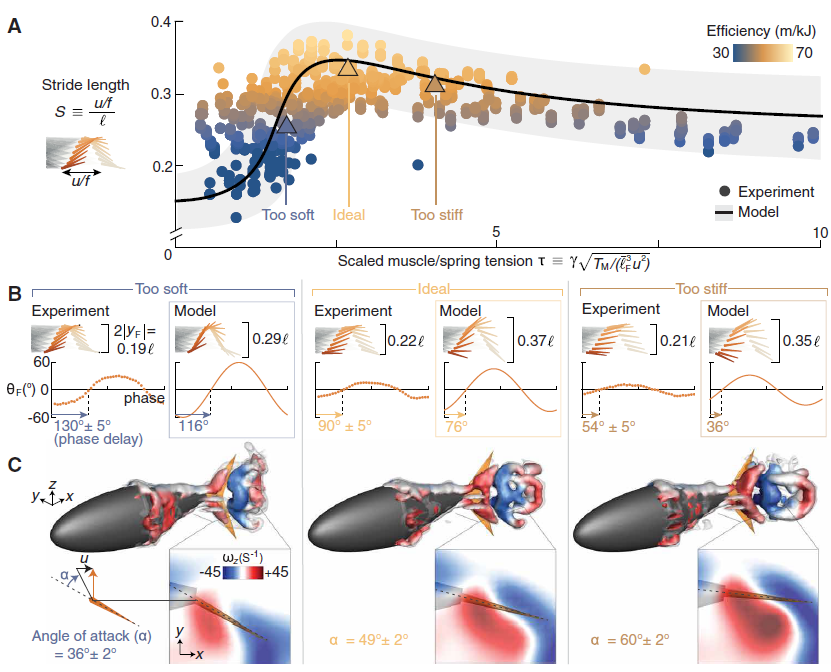
流体力学实验和数学模型预测高度吻合,由此得出尾巴弹性应根据游速平方比例调节以实现最高游动性能。
我们发现,在变速游动过程中,尾巴的弹性系数应随着游动速度平方比例增长,从而通过这种简单的调节来实现最高推进效率。为了进一步验证动态弹性调节在真实环境中的有效性,我们利用信息物理实验系统去模拟了长续航机动游动任务,在与金枪鱼相似的游动参数范围内(摆动频率:0 到 6 赫兹,游动速度:0 到 2 体长每秒),动态弹性调节最多能实现接近 100% 推进效率提升。
动态弹性调节应用前景广阔
我们提出的动态弹性调节方法解决了困扰研究人员多年的柔性仿生机器鱼的性能瓶颈,为未来设计高频率、高速的大型仿生水下潜航系统提供了理论基础。该研究结果不仅适用于当前的机器金枪鱼平台,更能拓展至很多其他的仿生推进应用场景。基于我们的模型预测,动态弹性调节尤其适合于大尺寸、高速、高频率的仿生潜航器。该项研究为未来的高性能仿生推进系统开发提供了新的解决方案,有望大幅度提高仿生柔性机器系统的推进性能和应用能力,让柔性智能设备从单一的实验环境走向实际海洋作业等复杂场景。
























