












有没有兴趣来个水下探险?
玩一次就可以财务自由的那种。
人类航海史最早可以追溯到新石器时代。
在漫长的岁月中,由于天气、战争等各种原因,无数船只沉入海底。加上近代人类在航空技术上的进步,又有不少航空器由于各种原因葬身水下。
这些长眠于海底的船只、飞机以及其他物件有些在航行过程中携带了大量的金银珠宝,有些则由于其自己特殊的历史价值令人趋之若鹜。
比如在大航海时代沉没的这艘「阿托卡夫人」号,在1985年被发现时,船上共有超过40吨、价值超4亿美元的宝藏。
发现它的梅尔·费舍尔也因此走上了财务自由之路。
但显然下海找船这件事并不是谁都能搞定。
潜入深海需要价值不菲的专业设备和人员。这倒是其次,更重要的是:
你可能根本就不知道沉船在哪。
海下沉船是一笔宝贵的公共财产,因此,国家政府机构自然就承担起了挖掘和保护的重任。
在美国,1995年成立的海军历史与遗产司令部(NHHC)水下考古分部承担着美国在世界各地海底长眠的2,500 多艘沉船和 15,000 多架飞机残骸的开发和保护工作。

而这其中先找到这些水底残骸的位置至关重要。
不久前,NHHC与美国德州大学开展了一项研究,通过计算机视觉系统从遥感图像中找到并确认残骸。
通过测试美国和波多黎各海岸的遥感图案,准确率达到了92%。
研究介绍
作者使用Python完成了所有建模,并在ArcGIS Pro中完成了地理空间分析。
用TensorFlow支持的Keras运行深度学习模型,GPU用的是NVIDIA 1080 GEFORCE GTX。
训练数据集
训练数据包括已确认沉船的GPS定位和相关的测深数据。
测深数据从美国国家海洋和大气管理局 (NOAA)数据访问(NOAA’s Data Access Viewer)中获取,由分辨率为1米的激光雷达和多波束声纳产生。
沉船GPS坐标通过NOAA的沉船和障碍物数据库(AWOIS)获取。
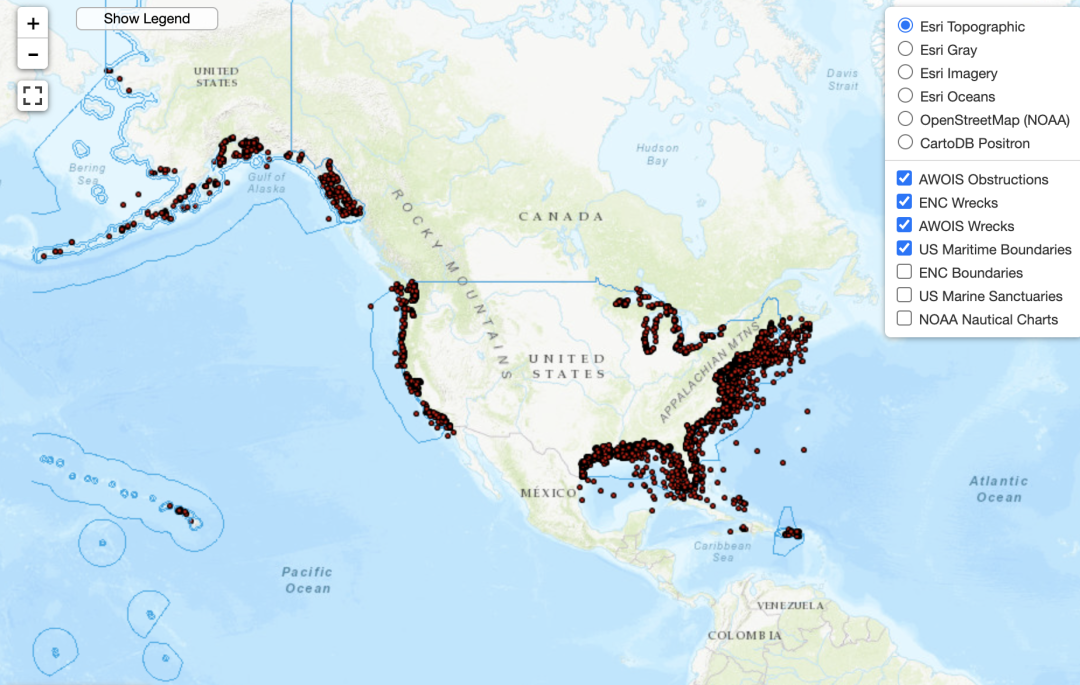
美国沉船数据库--交互式地图
沉船训练数据中包含163艘沉船,研究人员通过增强沉船数据,得出额外247个不同的沉船图像。
总训练数据集包括410艘沉船,410个区分沉船和地形的背景地形图块;而测试数据集则额外含有40艘沉船和40个背景地形图块,无数据增强。
以YOLOv3为架构的模型
作者用ArcGIS Pro从高程数据(elevation data)中得出山体阴影,以png格式导出包含沉船的山体阴影图块,再用微软的Visual Object Tagging Tool标记。
检测精度极高,检测速度也飞快,所以研究人员用Joseph Redmon的卷积神经网络单次检测器模型YOLOv3为模型架构,具体应用是基于qqwweee的keras-yolo3和AntonMu的TrainY ourOwnYOLO这两个GitHub存储库开发。
YOLOv3网络框架分为两个组件:特征提取器和检测器。

输入到特征提取器之前,每个图像会自动调整为416 × 416像素。
YOLOv3使用的Darknet53能够输出三种不同规模的图像到检测器中,检测器会输出最合适的边框,包括预测的边框中心点、宽度和高度、置信度和类别标签。
该模型使用迁移学习,权重在ImageNet1000数据集上进行了预训练。
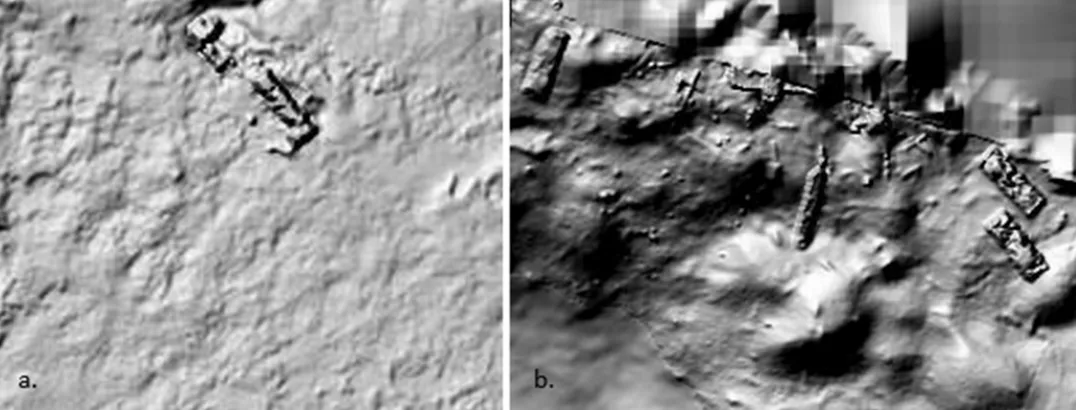
模型输出的图像里标示出沉船的边框和预测的置信度分数。
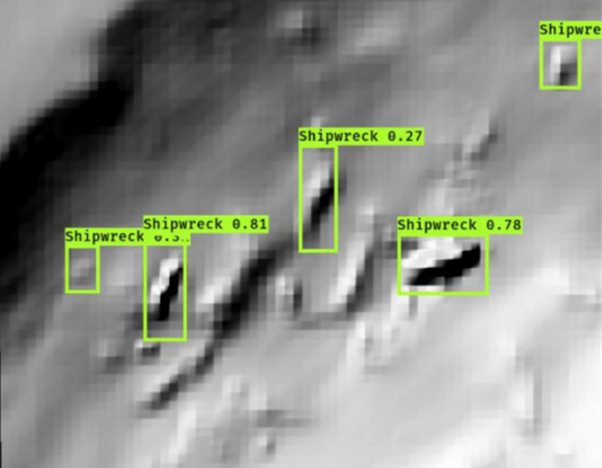
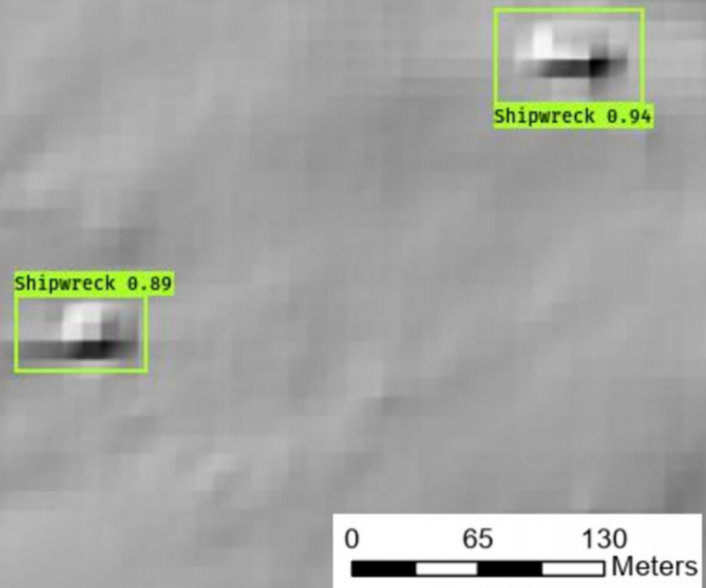
上图为模型输出的声纳或激光雷达山体阴影图像,标识的边框为预测的沉船位置和预测置信度分数。
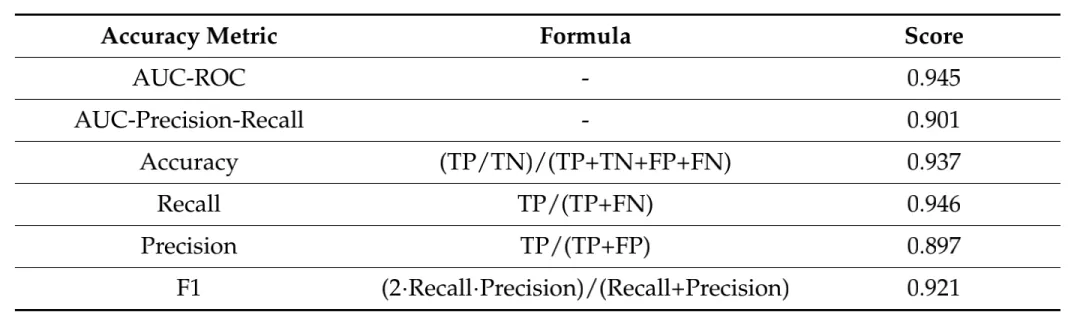
精确度指标
模型性能的精确度指标包括接收器操作特征曲线 (AUC-ROC)、精确率-召回率曲线(precision-recall)、总体准确率、召回率、准确率和F1分数。
一般来说,AUC-ROC分数在0.7到0.8之间是可以接受的,0.8以上为优秀,0.9以上为优秀。
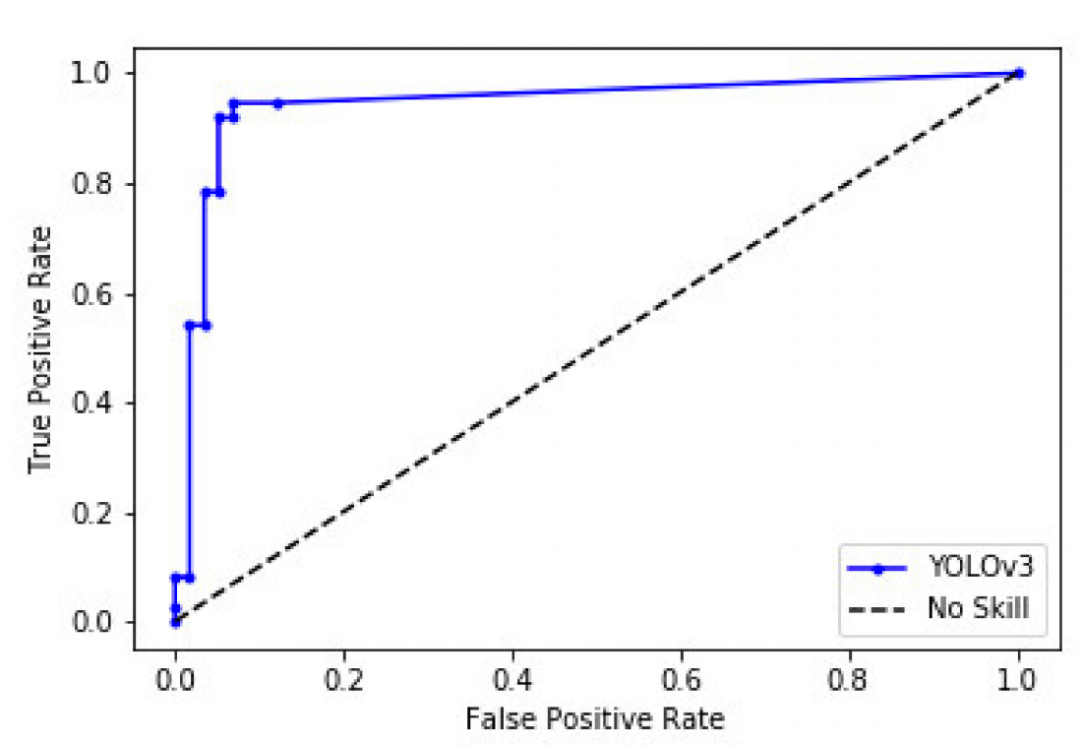
AUC-ROC曲线图
模式与数据分析
为了寻找沉船位置和形态的模式,作者列出了箱线图和直方图,用单向方差来分析。
计算得出紧邻沉船区域的参数后,与模型训练中使用的背景地形值进行比较。
参数包括坡度、曲率(描述坡度的整体形状)、曲率剖面(平行于最大坡度方向)、曲率平面(垂直于最大坡度方向)、残骸面积、残骸到岸距离、沉船深度等。
研究结果
模型的AUC-ROC得分为0.945,其它各项指标得分如下图。
模型的AUC精确率-召回率得分为 0.901。
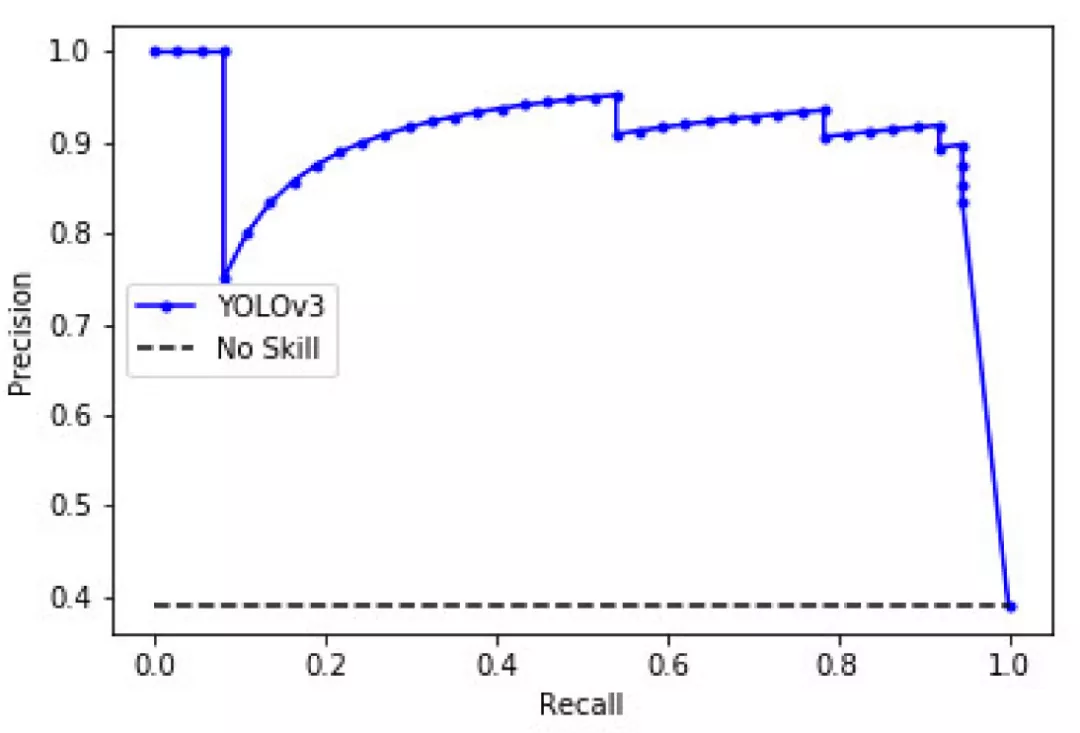
AUC精确率-召回率得分
和数据集中的背景地形图相比,沉船明显具有更高的斜率值和曲率值。
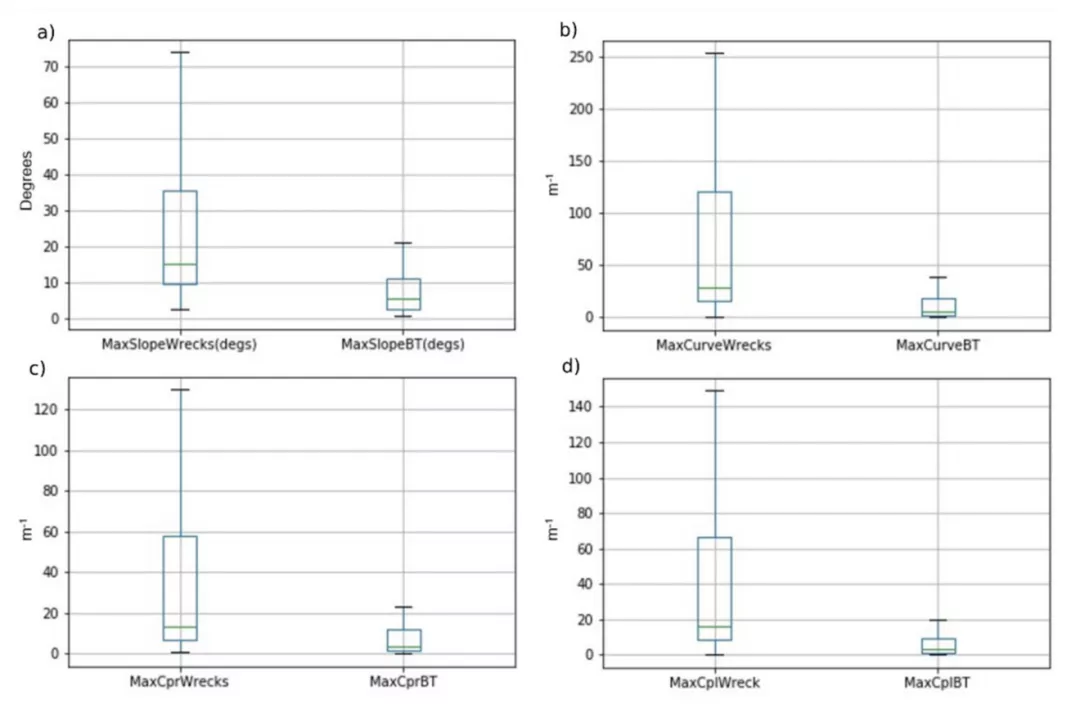
与背景地形比较沉船的 (a) 最大斜率、(b) 曲率、(c) 曲率剖面和 (d) 曲率平面的箱线图。
F比率和p值表示,与背景地形相比,这些参数中的每一个都倾向于共享不同的沉船值范围。
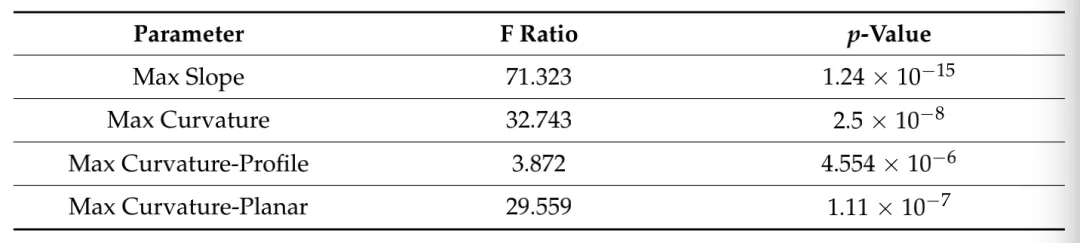
所有沉船与背景地形参数的F比率和p值(alpha= 0.05)
作者假设沉船到残骸可见度可能与沉船的保存状态相关,在海水中分解得越多的沉船看起来越不呈矩形。
但这个假设需要实地验证,因为很多因素影响沉船的状态,包括沉船时间、氧气情况和湍流等环境条件。
作者还假设沉船能见度可能会受到海水透明度的影响。
为了验证这一假设,作者创建了一个水清晰度等级,并使用以ArcGIS为底图的光谱卫星图像,对每个沉船位置的水清晰度进行评估。
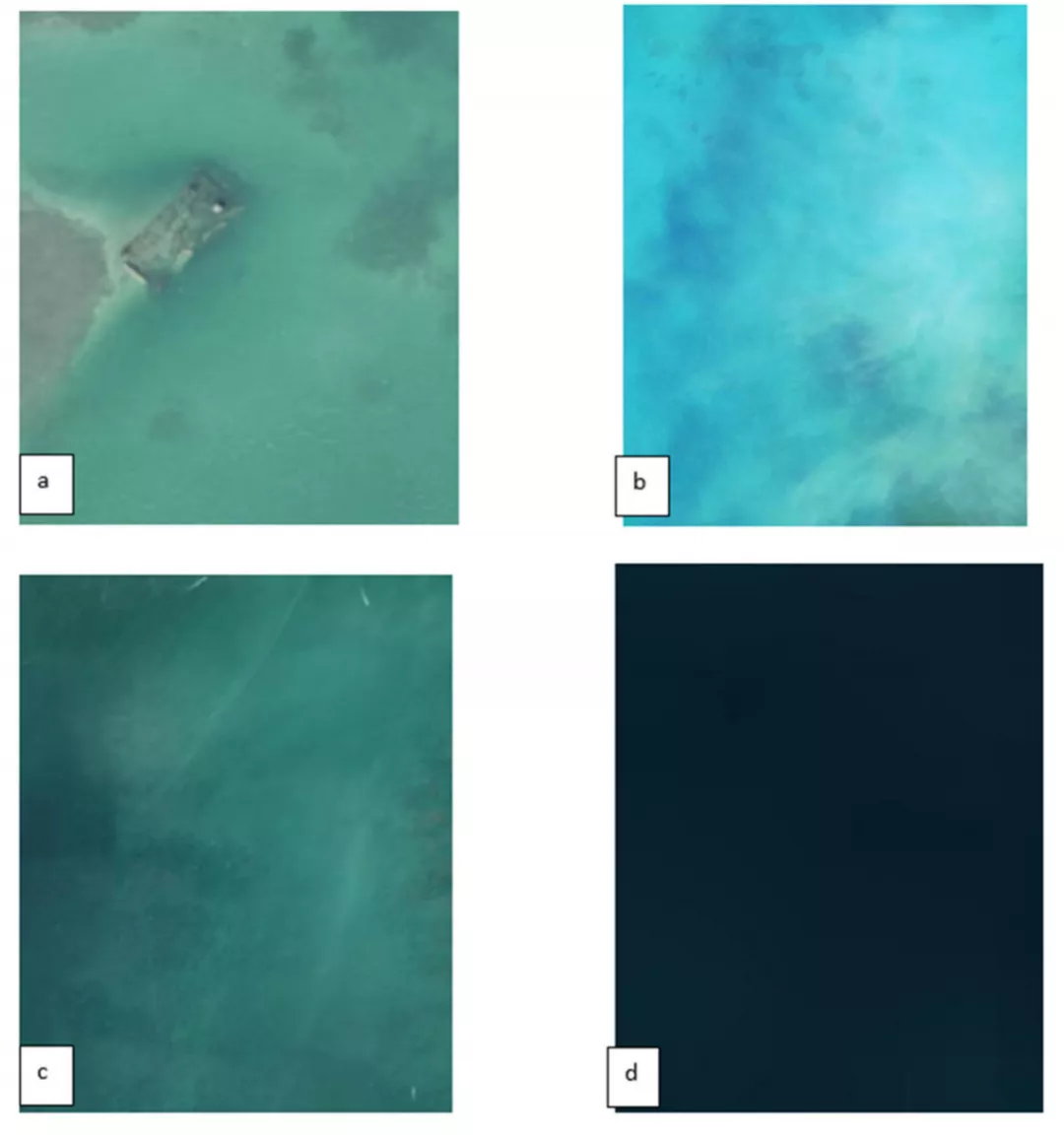
但由于90%以上的沉船都位于不透明的水域中,这一假设并不成立。
研究总结(太长不看版):
1. 分辨率为3米的激光雷达和多波束声纳偶尔也能检测出残骸,但分辨率为1米的效果更理想。
2. 仅有不到10艘沉船能够轻易识别出来,大部分沉船仅表现为地形异常。
3. 沉船检测除了受到测深数据的空间分辨率外,还受到水深和海水清晰度的影响。
清晰的沉船残骸
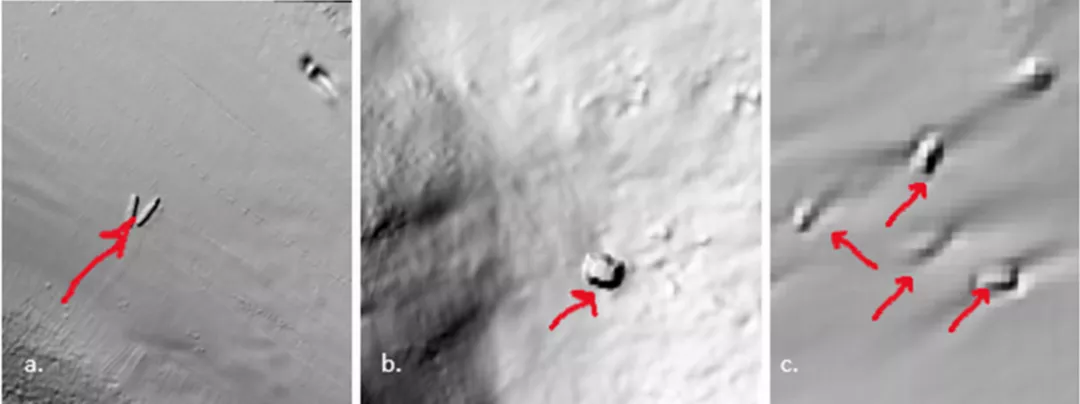
箭头所示为不太清晰的沉船残骸
结论
作者通过研究验证了将AI用于水下考古的可能性——提出的深度学习的模型检测出水底沉船精度为0.92,能够有效检测出沉船残骸。
未来通过更大、更多样的训练数据集,可以进一步提高模型性能和泛化能力,从而开辟了新的海洋探索方法。
不仅如此,这套训练好的系统已经可以从新的数据中来预测沉船或者飞机的方位,并且还能够适配于其他格式的数据,比如多光谱图像。
总之,有了AI,科研部门可以更快、更准地发现海底沉船了。
作者简介
论文一作Leila Character是德州大学奥斯汀分校的在读博士。她专注于使用机器学习和遥感图像来识别考古和自然特征。
她可谓是一个跨界研究学者,将AI应用于跨度非常大的专业中,尤其是考古学在学术界堪称是一片「蓝海」。
这项研究的模型还能够在预测世界不同地区陆地和水下不同类型的考古特征之间快速、轻松地切换。
为此,她还将通过这项研究来寻找古玛雅考古建筑、玛雅考古遗址的洞穴和罗马尼亚墓葬的项目。


















