













近日,机器人领域知名会议 RSS(Robotics: Science and System)公布了今年的最佳论文、最佳学生论文、杰出审稿人、时间检验奖等重要奖项。其中,最佳论文奖和杰出审稿人奖都由华人学者摘得。
与其他领域动辄接收上千篇论文的顶会不同,RSS 算是一个小众的机器人会议,每年接收的论文只有几十篇,录取难度比较高。从方向来看,RSS 接收的论文更偏重算法和数学,今年的建议投稿方向包括机制设计、机器人学习、控制与动力学、人机交互、机器感知、多机器人系统和医疗保健机器人等。偏应用的机器人文章可能更适合投 ICRA 和 IROS。
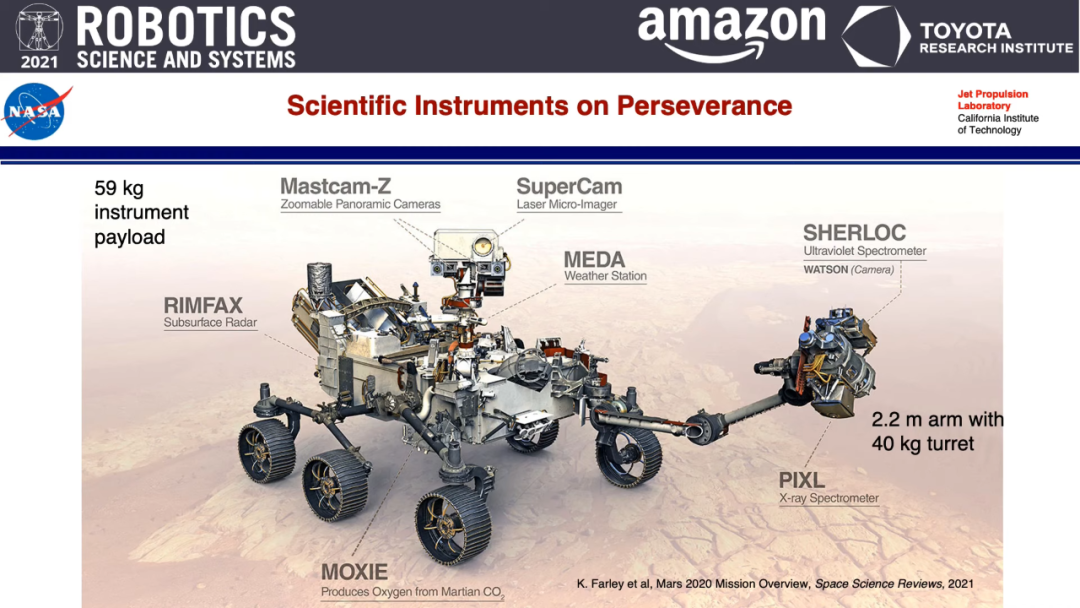
受疫情影响,今年的 RSS 于 7 月 12 日至 16 日在线上举办,分为 Keynote、Workshop、Tutorial 等多个环节。在 Keynote 环节,美国宇航局喷气推进实验室高级研究科学家兼计算机视觉小组主管 Larry Matthies 介绍了「毅力号」火星车在登陆火星之后取得的进展。在 Workshop、Tutorial 等环节,来自多个研究机构的学者探讨了机器人视觉学习与推理、GPU 加速的机器人学习与控制等话题。相关视频可以在 Youtube 等平台找到。
如今,备受关注的最佳论文等奖项也已出炉,以下是详细的获奖信息。
最佳论文奖
论文:TARE: A Hierarchical Framework for Efficiently Exploring Complex 3D Environments
- 论文主页:https://roboticsconference.org/program/papers/018/
- 作者:Chao Cao、Hongbiao Zhu、Howie Choset、Ji Zhang
- 机构:CMU
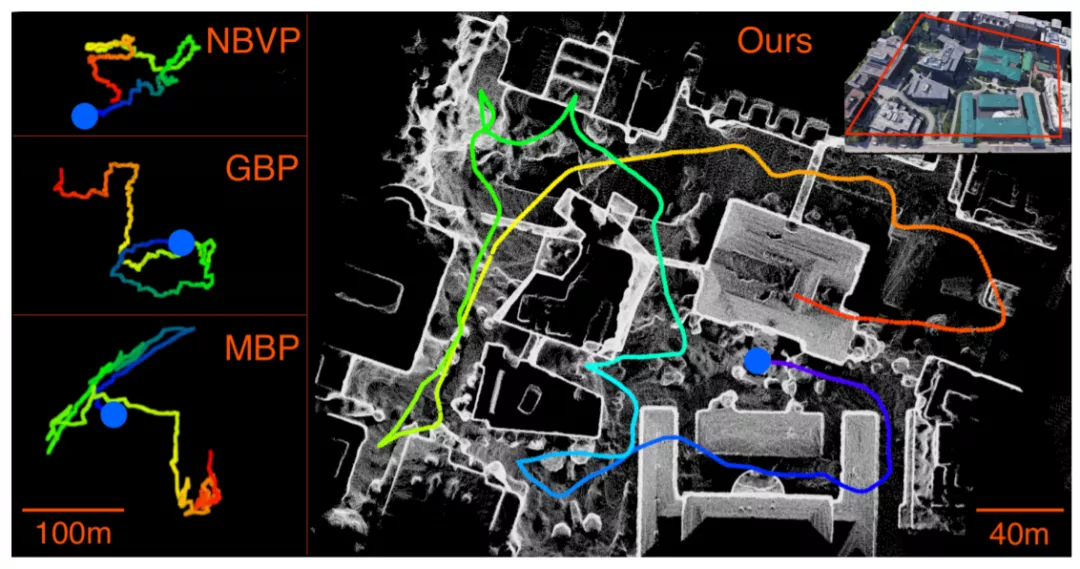
让机器人在复杂的 3D 空间中自主探索是一个颇具挑战性的问题,因为它需要同时完成两项任务:1)在线更新环境表示,以跟踪已探索的区域;2)搜索连续可遍历路径的表示,以引导机器人探索未知区域。
在这篇论文中,研究者提出了一种在复杂 3D 环境中自主探索的方法,其探索速度比当前的 SOTA 方法还要快。具体来说,该方法使用了一种分层框架:第一层在局部规划范围内保持环境的高分辨率表示并计算详细路径;第二层在全局范围内保持环境的低分辨率表示并计算粗略路径。
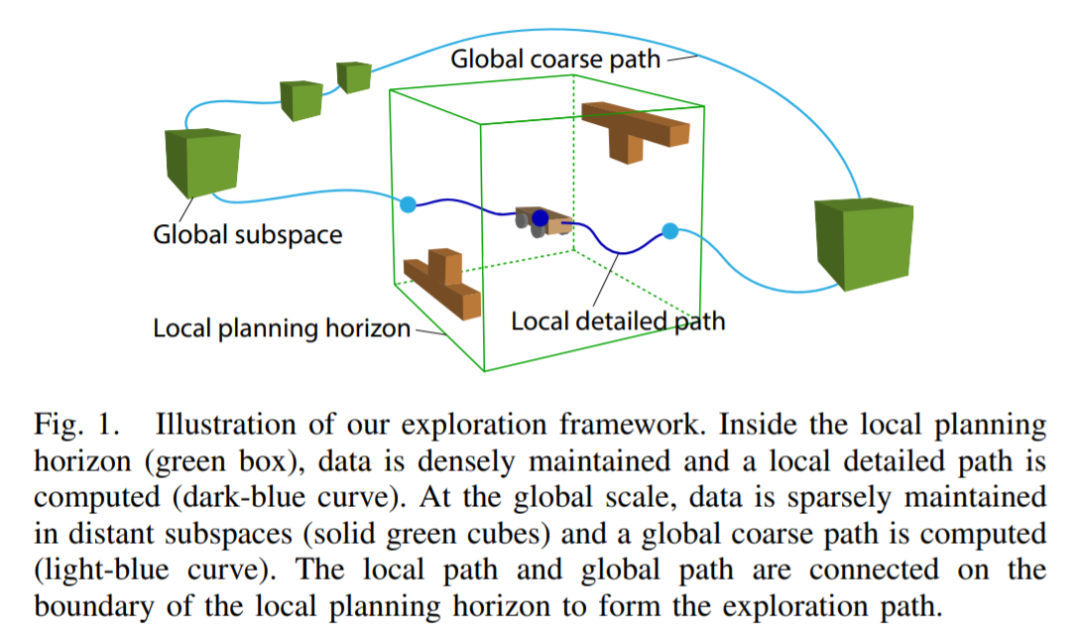
该架构表明,在机器人附近进行详细的数据处理是最高效的,牺牲远离机器人区域的细节计算可以提高计算速度。该方法根据路径的长度优化整个探索路径。此外,局部区域的路径在运动动力学上是可行的,机器人可以遵循该路径快速前进。
在实验中,该系统通过地面和空中机器人,自主探索了高维、复杂的室内外环境。与 SOTA 方法相比,该方法的探索效率(每秒平均探索量)提高了 80%,但消耗的算力还不到 SOTA 方法的 50%。
该论文的第一作者 Chao Cao 本科毕业于香港大学,目前在卡内基梅隆大学读博,研究兴趣主要集中在机器人导航和运动规划。除了日常科研之外,他还在领导 DARPA 地下城市挑战赛 Team Explorer 竞赛的规划工作。
最佳论文入围
除了最佳论文奖外,本届 RSS 会议还有三篇论文入围了该奖项,分别如下:
论文 1:Optimal Pose and Shape Estimation for Category-level 3D Object Perception
- 论文主页:https://roboticsconference.org/program/papers/025/
- 作者:Jingnan Shi、Heng Yang、Luca Carlone
- 机构:MIT
本文第一个贡献是为姿势和形状估计提供了首个可证明的最佳求解器;第二个贡献是在求解器中添加一个异常拒绝层(outlier rejection layer),从而使求解器对大量错误检测具有鲁棒性;第三个贡献是广泛的实验评估,该研究除了在模拟数据集和 PASCAL3D + 数据集上进行消融研究外,还将求解器与深度学习关键点检测器相结合,并表明所得到的方法比 ApolloScape 驾驶数据集中 SOTA 车辆姿态估计方法有所改进。
论文 2:Moving sidewinding forward: optimizing contact patterns for limbless robots via geometric mechanics
- 论文主页:https://roboticsconference.org/program/papers/031/
- 作者:Baxi Chong、Tianyu Wang、Bo Lin、Shengkai Li、Howie Choset、Grigoriy Blekherman、Daniel Goldman
- 机构:佐治亚理工学院、CMU
本文中研究者使用几何运动规划方案,并开发了一个框架来设计、优化和分析接触模式,以在期望的方向上产生有效的运动。该研究提出的框架提供了接触模式设计的物理见解,并借鉴了经验准则。应用该框架,研究者不仅可以通过接触模式来控制 12-link 四肢机器人的运动方向,而且可以为电机较少的机器人(如 6-link 机器人)设计有效的侧绕步态。实验表明,该方法通过物理实验测试获得了很好的一致性。
论文 3:Toward Certifiable Motion Planning for Medical Steerable Needles
- 论文主页:https://roboticsconference.org/program/papers/081/
- 作者:Mengyu Fu、Oren Salzman、Ron Alterovitz
- 机构:北卡罗来纳大学教堂山分校、以色列理工学院
本文提出了第一个用于可操纵引导针的运动规划器。它能够保证在临床上适当的假设下,在有限的时间内为指定的目标计算出准确的避障运动计划,或者通知用户不存在这样的计划 。该研究基于一种新的多分辨率规划方法,提出了一种高效、分辨率完备的可操纵针运动规划方法。与 SOTA 可操纵针运动规划器相比,研究表明,新的分辨率完整运动规划器计算计划更快、成功率更高。
最佳学生论文
本届 RSS 会议的最佳学生论文有两篇,分别由博世人工智能中心、丹麦技术大学等机构和南加州大学、英伟达等机构的研究者获得。
论文 1:Learning Riemannian Manifolds for Geodesic Motion Skills
- 论文主页:https://roboticsconference.org/program/papers/082/
- 作者:Hadi Beik-mohammadi、Soren Hauberg、Georgios Arvanitidis、Gerhard Neumann、Leonel Rozo
- 机构:博世人工智能中心、丹麦技术大学、图宾根大学、卡尔斯鲁厄理工学院
为了与人类一起工作并在非结构化环境中执行任务,机器人必须学习新的运动技能并尽快适应未见过的环境。这需要学习模型来捕捉相关的运动模式,同时提供足够的灵活性以使已编码技能适应新的要求,例如动态避障。
该研究引入了黎曼流形来解决这个问题,并提出从人类示范中学习黎曼流形。在人类身上,测地线(geodesics)是自然而然的运动技能。该研究通过在机器人末端执行器的位置和方向空间上的变分自编码器(VAE)来实现这一点。测地线运动技能可以让机器人规划数据流形上任意点之间的运动。这种技能还提供了一种简单的避障方法,即通过在线方式重新定义环境度量来避开障碍。
此外,测地线利用多解设置产生的流形来设计以前没有演示过的运动。该研究使用 7 个自由度的机器人机械手来测试学习框架。在此框架下,机器人能够很好地学习和再现具有复杂运动模式的真实技能、避开以前没见过的障碍,并在多解设置中生成新的运动。
论文 2:DiSECt: A Differentiable Simulation Engine for Autonomous Robotic Cutting
- 论文主页:https://roboticsconference.org/program/papers/067/
- 作者:Eric Heiden、Miles Macklin、Yashraj S Narang、Dieter Fox、Animesh Garg、Fabio Ramos
- 机构:南加州大学、多伦多大学、悉尼大学
在这篇论文中,研究者展示了首个用于切割软材料的可微模拟器。该模拟器通过一个基于有向距离场( SDF)的连续接触模型,以及一个在切割面两侧插入弹簧并允许它们减弱至零刚度的连续损伤模型来增强有限元法(FEM),从而形成裂纹。
研究者通过各种实验对该模拟器的性能进行了评估,结果如下:
- 首先可以对该模拟器进行校准以匹配来自 SOTA 商业求解器和真实世界切割数据集的合力和形变场,并在切割速度和目标实例上具有普遍性;
- 其次可以利用该模拟器的可微性来高效地执行贝叶斯推断,并在无导数方法的一部分时间内估计数百个参数的后验;
- 最后可以通过优化模拟过程中的控制参数,以通过横向切片动作最小化切割力。
苹果切片的可视化图。
时间检验奖
本届 RSS 会议的时间检验奖颁给了 2008 年发表的一篇论文《 SARSOP: Efficient Point-Based POMDP Planning by Approximating Optimally Reachable Belief Spaces 》,论文作者为 Hanna Kurniawati、 David Hsu 和 Wee Sun Lee,他们当时都来自新加坡国立大学。
论文地址:http://www.roboticsproceedings.org/rss04/p9.pdf
不确定和动态环境中的运动规划是自主机器人的基础能力。POMDPs(partially observable Markov decision processes )算法为解决此类问题提供了一个标准的数学框架,但由于其计算复杂度过高而经常在机器人技术中避免使用。
在本文中,研究者旨在为常见的机器人任务创建实用的 POMDP 算法和软件,为此他们提出了一种基于点的 POMDP 算法 SARSOP ,该算法利用最佳可达信念空间的概念来提升计算效率。在模拟中,研究者成功地将该算法应用于一系列常见的机器人任务,比如沿海导航、抓取、移动机器人探索和目标追踪等,所有这些任务都被建模为具有大量状态的 POMDP。他们发现在大多数任务实例中,该算法显著优于当前最快的基于点的算法之一。
SARSOP 算法。
杰出审稿人奖
个人主页:https://www.khoury.northeastern.edu/people/lawson-wong/
本届 RSS 会议的杰出审稿人奖颁给了美国东北大学 Khoury 计算机科学学院的助理教授 Lawson Wong。他是该校通用机器人和人工智能实验室(GRAIL)的负责人,致力于学习、表示、估计和使用自主机器人发现可能有用的关于世界的知识。他自己感兴趣的研究议题是识别和学习可以赋能高效机器人学习和规划的中间状态表示,从而实现机器人泛化。总之,他对机器人、机器学习和人工智能等领域的很多课题都感兴趣。
2009 年,Lawson Wong 获得了斯坦福大学的计算机科学荣誉学士和硕士学位。2016 年,他在麻省理工学院完成了博士学位。之后,他担任布朗大学的博士后研究员和高级研究助理。2018 年,他加入东北大学,任职助理教授。
























