以某些昆虫的粘性脚掌为灵感,加州大学伯克利分校的工程师们成功创造出一个具有高度灵敏性的小型机器人,能够轻松地在各种复杂环境下爬行。科学家使它们能够粘附在表面上,利用静电粘附创造出一个昆虫规模的机器人。
静电粘附使机器人能够以与猎豹相同的敏捷性进行转弯和旋转。它的高敏捷性使机器人能够在复杂的地形上移动,并迅速避开任何意外的障碍。该团队创造的机器人是由一层薄薄的材料制成的,当施加电压时,它可以弯曲和收缩。






该机器人的设计最初是在 2019 年开发的,是一个蟑螂大小的机器人,能够以每秒 20 个身体长度的速度在平坦的表面上窜动,折算下来是每小时大约 1.5 英里。在新的研究中,该团队为机器人添加了一对静电脚垫。通过给其中一个脚垫施加电压,会增加脚垫和机器人行走的表面之间的静电力,使脚垫更牢固地粘在表面上。当其中一个脚垫更牢固地粘在表面上时,机器人的其余部分就会围绕着这只脚旋转,增加其灵活性。
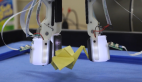
一对脚垫使机器人的操作者能够控制其轨迹,并使机器人能够以超过大多数昆虫产生的向心加速度进行转弯。该团队表示,虽然2019 年的原始机器人可以移动得非常快,但他们无法控制机器人是向左还是向右走。研究期间拍摄到新的机器人在携带一个小型气体传感器时在乐高迷宫中导航,并转弯以避免掉落的碎片。
机器人的小尺寸使它能够在被一个120磅重的人类踩在脚下时幸存下来。像伯克利团队创造的这种具有高度敏捷性的小而坚固的机器人,有可能被用于搜索和救援行动以及其他对人类有危险的任务,包括寻找潜在的气体泄漏。