本文经AI新媒体量子位(公众号ID:QbitAI)授权转载,转载请联系出处。
一只虫仿佛开了上帝视角,毫不犹豫地一次性穿过迷宫爬到终点:
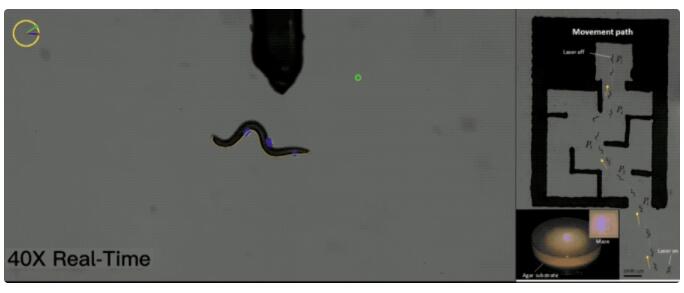
这条长度约1毫米,宽度80微米的虫,还是在麻醉状态,神经系统无法向肌肉传达运动指令。
而控制它运动的,是视觉反馈导航算法。
它成了一条赛博虫,一个活着的微型机器人。
微米级机器人在医疗领域有很高的应用价值,比如可以在人体内自主行动,把药物精准地送到能发挥药效的地方,还可以辅助精子移动帮助人工受孕。
这项把科幻场景带到现实的研究,来自加拿大麦吉尔大学的90后博士董先科,相关论文刊登在Science子刊Science Robotics上。

不过,为什么不是从头造一个机器人,而用虫子代替呢?
因为微型机器人在技术上还面临着几大难题:
- 工艺上,微米尺度下的机器人如何制造、装配,又该如何供能?
- 控制上,如何精密控制微型机器人的运动,又该如何测量?
- 原理上,微米环境下物理定律的尺度都缩小了,摩擦力与粘滞力的作用要比重力大上几个数量级,如何让机器人高效运动?
董先科脑洞大开,能不能借用一下现成的生物身体?
自然进化出来的生物已经适应了微米环境的运动方式,还会自己吃饭喝水供能,只要想办法进行控制,问题就都解决了。
于是他盯上了线虫。
被研究得明明白白的虫
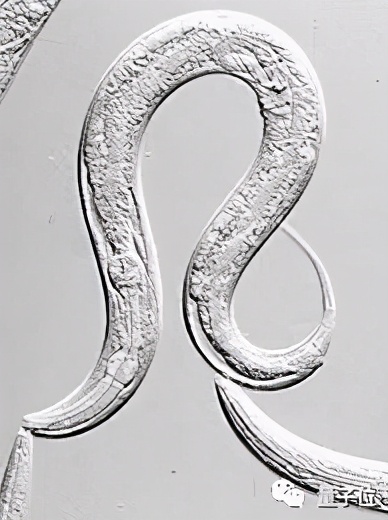
研究选用的是秀丽隐杆线虫,这种线虫已经是各类科学研究的常客。
因为它容易繁殖,而且全身透明,观察起来很是方便:
它还有一个特点是结构简单,成虫只有大约1000多个体细胞。
其中神经细胞有302个,它的神经系统全部的连接已被科学家画出图谱,还能实时成像。
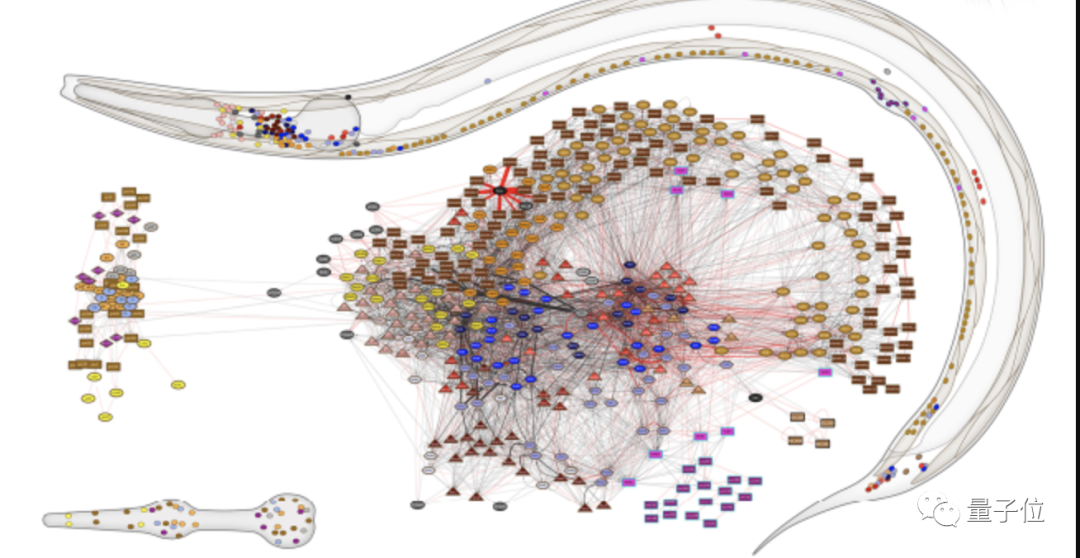
可以说是被研究得明明白白的了。
现在微型机器人身体已经找到了,接下来要解决的是如何控制它行动。
用算法取代大脑
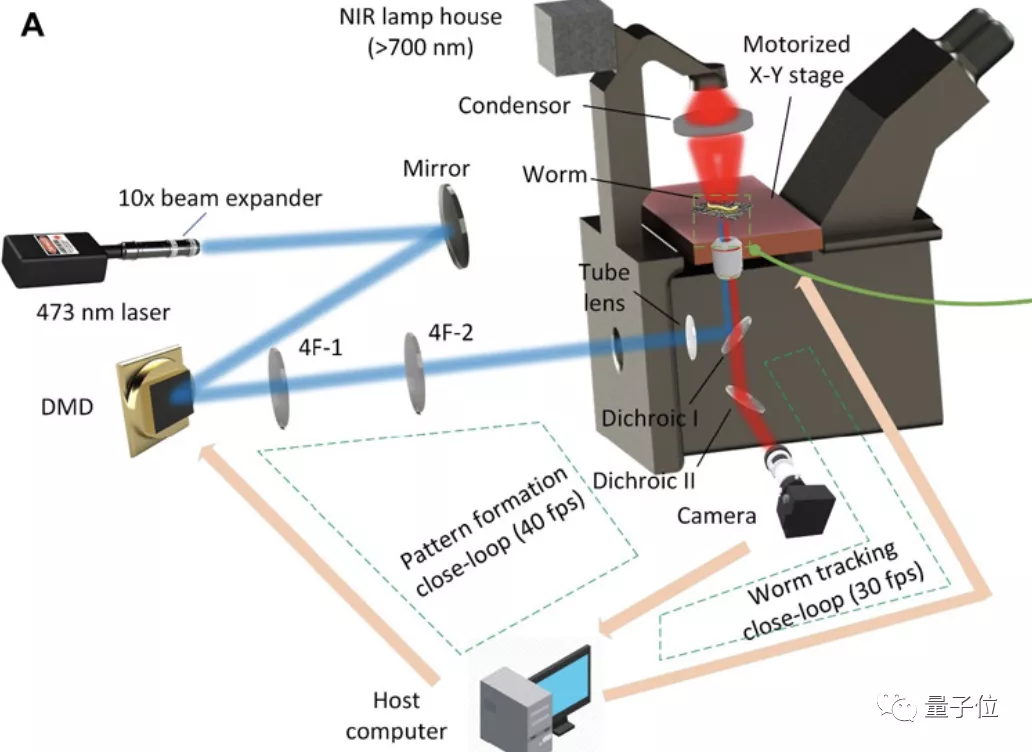
刺激线虫肌肉运动的是光信号。
用波长473纳米的蓝色激光照射肌肉细胞,可以刺激细胞上ChR2通道打开,让钙离子进入刺激肌肉的收缩,从而控制线虫肌肉的运动。
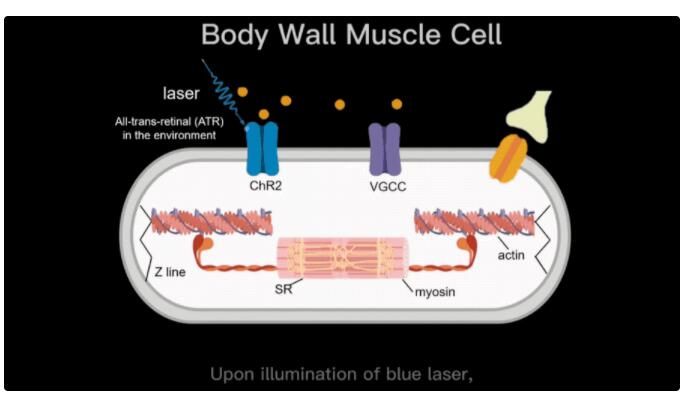
这项技术叫做光遗传学,是一项整合了光学、软件控制、基因操作技术、电生理等多学科交叉的生物工程技术。
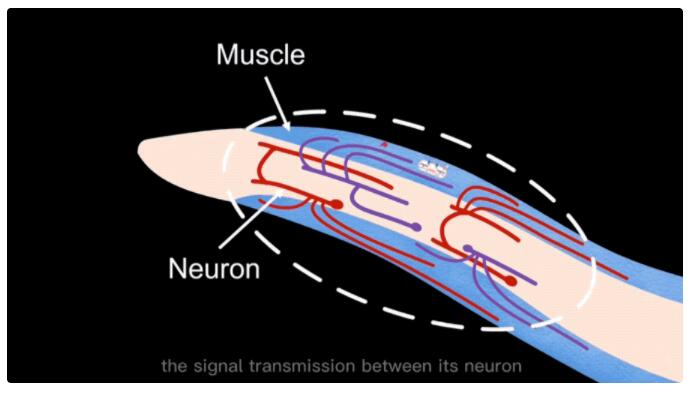
首先用化学方法阻断线虫的运动神经元与肌肉细胞的信息传递。
然后,通过机器视觉算法实时分析线虫的姿态和周围的环境。
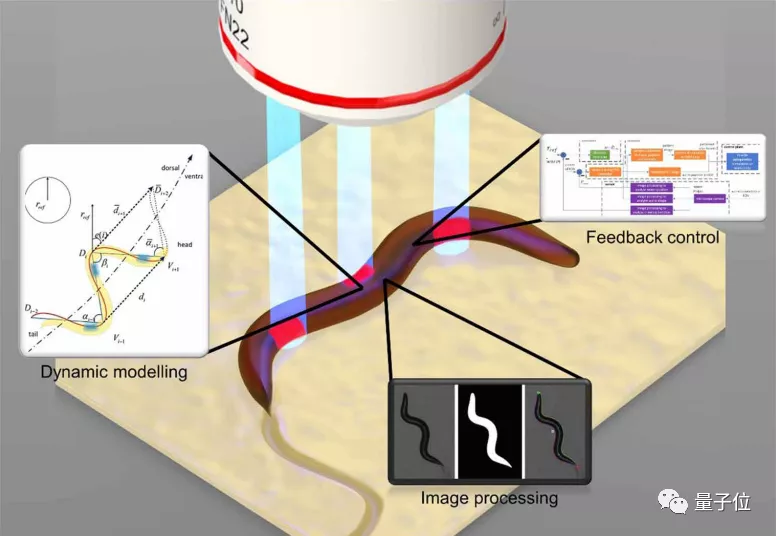
用微米级激光束精准照射线虫的不同部位,来控制移动方向,实现了“用算法取代大脑”。
完整的实验装置示意图是这样的:
一个开创性思路
这项研究除了开辟活体生物与机器人结合的新思路以外,对其他相关领域也很有启发。
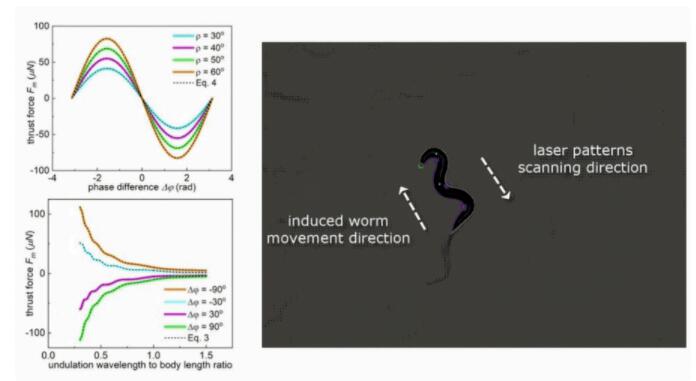
对于传统机器人,微米环境下的运动与日常宏观运动有很大差别,往往运动速度和效率不高。
通过精确控制线虫运动结合肌肉活性的荧光成像,可以帮助微米尺度下蛇形运动的动力学研究,指导新型机器人的设计和控制。
对于医疗,用微米激光束精密操控肌肉细胞活性的实验,对瘫痪疾病的治疗也有启示意义。
研究中开发的分析线虫运动的算法代码还发在了GitHub上开源。
本文第一作者董先科,于2012年在哈尔滨工业大学航天学院自动化专业完成本科学习。
2014-2019年在加拿大麦吉尔大学机械工程系获得博士学位,主攻机器视觉,微机器人,以及机器人精密操作研究方向。
2017-2019年在加拿大多伦多大学机械与工业化学院学习访问,完成博士课题。
2019年至今在加拿大多伦多一家科技公司担任算法研发工程师,负责嵌入式高帧率目光跟踪系统的算法开发,以及在医疗AR和辅助驾驶场景的应用。
他的研究兴趣包括了图像处理与机器视觉,机器学习与深度学习,微机器人和机器人控制等方向。
近年在Science Robotics, IEEE T-MECH, IEEE T-ASE, IEEE T-BME, IEEE T-NBS, ICRA等权威期刊和会议发表学术论文20余篇,曾以第一作者身份获得机器人领域顶级学术会议ICRA2015的最佳会议论文提名奖和最佳自动化论文提名奖。
通过这项研究,他对机器人有了新的感悟:
生物本身即最完美的机器人。
论文地址:
https://robotics.sciencemag.org/content/6/55/eabe3950/tab-figures-data
相关代码:
https://github.com/BionDong/worm-locomotion-feature-analysis