失败是成功之母,这篇文章就是一次真实的失败调试记录。
通过这篇文章,您能深刻体验到 Linux 系统中下面几个概念:
- 实时进程和普通进程的调度策略;
- Linux 中混乱的进程优先级是如何计算的;
- CPU亲和性的测试;
- 多处理器(SMP)遇到实时进程和普通进程的程序设计;
- 道哥的脑袋被门夹了一下的短路经历;
背景知识:Linux 调度策略
关于进程的调度策略,不同的操作系统有不同的整体目标,因此调度算法也就各不相同。
这需要根据进程的类型(计算密集型?IO密集型?)、优先级等因素来进行选择。
对于 Linux x86 平台来说,一般采用的是 CFS:完全公平调度算法。
之所以叫做完全公平,是因为操作系统以每个线程占用 CPU 的比率来进行动态的计算,操作系统希望每一个进程都能够平均的使用 CPU 这个资源,雨露均沾。
我们在创建一个线程的时候,默认就是这个调度算法 SCHED_OTHER,默认的优先级为 0。
- PS: 在 Linux 操作系统中,线程的内核对象与进程的内核对象(其实就是一些结构体变量)是很类似的,所以线程可以说是轻量级的进程。
- 在本文中,可以把线程约等于进程,有的地方也可能称为任务,在不同的语境下有一些不同的惯用说法。
可以这么理解:如果系统中一共有 N 个进程,那么每个进程会得到 1/N 的执行机会。每个进程执行一段时间之后,就被调出,换下一个进程执行。
如果这个 N 的数量太大了,导致每个进程刚开始执行时,分给它的时间就到了。如果这个时候就进行任务调度,那么系统的资源就耗费在进程上下文切换上去了。
因此,操作系统引入了最小粒度,也就是每个进程都有一个最小的执行时间保证,称作时间片。
除了 SCHED_OTHER 调度算法,Linux 系统还支持两种实时调度策略:
- 1. SCHED_FIFO:根据进程的优先级进行调度,一旦抢占到 CPU 则一直运行,直达自己主动放弃或被被更高优先级的进程抢占;
- 2. SCHED_RR:在 SCHED_FIFO 的基础上,加上了时间片的概念。当一个进程抢占到 CPU 之后,运行到一定的时间后,调度器会把这个进程放在 CPU 中,当前优先级进程队列的末尾,然后选择另一个相同优先级的进程来执行;
本文想测试的就是 SCHED_FIFO 与普通的 SCHED_OTHER 这两种调度策略混合的情况。
背景知识:Linux 线程优先级
在 Linux 系统中,优先级的管理显得比较混乱,先看下面这张图:
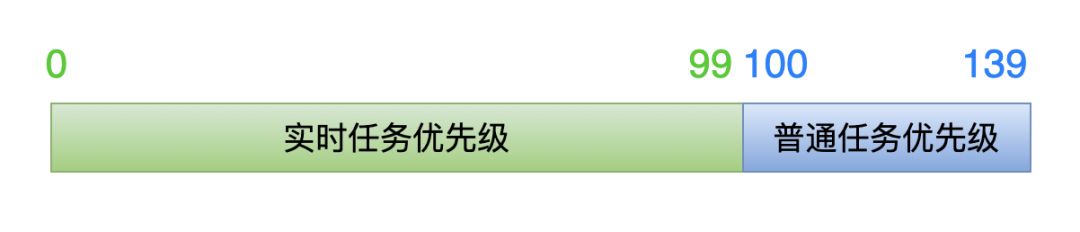
这张图表示的是内核中的优先级,分为两段。
前面的数值 0-99 是实时任务,后面的数值 100-139 是普通任务。
数值越低,代表这个任务的优先级越高。
数值越低,代表这个任务的优先级越高。
数值越低,代表这个任务的优先级越高。
再强调一下,以上是从内核角度来看的优先级。
好了,重点来了:
我们在应用层创建线程的时候,设置了一个优先级数值,这是从应用层角度来看的优先级数值。
但是内核并不会直接使用应用层设置的这个数值,而是经过了一定的运算,才得到内核中所使用的优先级数值(0 ~ 139)。
1. 对于实时任务
我们在创建线程的时候,可以通过下面这样的方式设置优先级数值(0 ~ 99):
- struct sched_param param;
- param.__sched_priority = xxx;
当创建线程函数进入内核层面的时候,内核通过下面这个公式来计算真正的优先级数值:
- kernel priority = 100 - 1 - param.__sched_priority
如果应用层传入数值 0,那么在内核中优先级数值就是 99(100 - 1 - 0 = 99),在所有实时任务中,它的优先级是最低的。
如果应用层传输数值 99,那么在内核中优先级数值就是 0(100 - 1 - 99 = 0),在所有实时任务中,它的优先级是最高的。
因此,从应用层的角度看,传输人优先级数值越大,线程的优先级就越高;数值越小,优先级就越低。
与内核角度是完全相反的!
2. 对于普通任务
调整普通任务的优先级,是通过 nice 值来实现的,内核中也有一个公式来把应用层传入的 nice 值,转成内核角度的优先级数值:
- kernel prifoity = 100 + 20 + nice
nice 的合法数值是:-20 ~ 19。
如果应用层设置线程 nice 数值为 -20,那么在内核中优先级数值就是 100(100 + 20 + (-20) = 100),在所有的普通任务中,它的优先级是最高的。
如果应用层设置线程 nice 数值为 19,那么在内核中优先级数值就是 139(100 +20 +19 = 139),在所有的普通任务中,它的优先级是最低的。
因此,从应用层的角度看,传输人优先级数值越小,线程的优先级就越高;数值越大,优先级就越低。
与内核角度是完全相同的!
背景知识交代清楚了,终于可以进行代码测试了!
测试代码说明
注意点:
- #define _GNU_SOURCE 必须在 #include
之前定义; - #include
必须在 #include 之前包含进来; - 这个顺序能够保证在后面设置继承的 CPU 亲和性时,CPU_SET, CEPU_ZERO这两个函数能被顺利定位到。
- // filename: test.c
- #define _GNU_SOURCE
- #include <unistd.h>
- #include <stdio.h>
- #include <stdlib.h>
- #include <sched.h>
- #include <pthread.h>
- // 用来打印当前的线程信息:调度策略是什么?优先级是多少?
- void get_thread_info(const int thread_index)
- {
- int policy;
- struct sched_param param;
- printf("\n====> thread_index = %d \n", thread_index);
- pthread_getschedparam(pthread_self(), &policy, ¶m);
- if (SCHED_OTHER == policy)
- printf("thread_index %d: SCHED_OTHER \n", thread_index);
- else if (SCHED_FIFO == policy)
- printf("thread_index %d: SCHED_FIFO \n", thread_index);
- else if (SCHED_RR == policy)
- printf("thread_index %d: SCHED_RR \n", thread_index);
- printf("thread_index %d: priority = %d \n", thread_index, param.sched_priority);
- }
- // 线程函数,
- void *thread_routine(void *args)
- {
- // 参数是:线程索引号。四个线程,索引号从 1 到 4,打印信息中使用。
- int thread_index = *(int *)args;
- // 为了确保所有的线程都创建完毕,让线程睡眠1秒。
- sleep(1);
- // 打印一下线程相关信息:调度策略、优先级。
- get_thread_info(thread_index);
- long num = 0;
- for (int i = 0; i < 10; i++)
- {
- for (int j = 0; j < 5000000; j++)
- {
- // 没什么意义,纯粹是模拟 CPU 密集计算。
- float f1 = ((i+1) * 345.45) * 12.3 * 45.6 / 78.9 / ((j+1) * 4567.89);
- float f2 = (i+1) * 12.3 * 45.6 / 78.9 * (j+1);
- float f3 = f1 / f2;
- }
- // 打印计数信息,为了能看到某个线程正在执行
- printf("thread_index %d: num = %ld \n", thread_index, num++);
- }
- // 线程执行结束
- printf("thread_index %d: exit \n", thread_index);
- return 0;
- }
- void main(void)
- {
- // 一共创建四个线程:0和1-实时线程,2和3-普通线程(非实时)
- int thread_num = 4;
- // 分配的线程索引号,会传递给线程参数
- int index[4] = {1, 2, 3, 4};
- // 用来保存 4 个线程的 id 号
- pthread_t ppid[4];
- // 用来设置 2 个实时线程的属性:调度策略和优先级
- pthread_attr_t attr[2];
- struct sched_param param[2];
- // 实时线程,必须由 root 用户才能创建
- if (0 != getuid())
- {
- printf("Please run as root \n");
- exit(0);
- }
- // 创建 4 个线程
- for (int i = 0; i < thread_num; i++)
- {
- if (i <= 1) // 前2个创建实时线程
- {
- // 初始化线程属性
- pthread_attr_init(&attr[i]);
- // 设置调度策略为:SCHED_FIFO
- pthread_attr_setschedpolicy(&attr[i], SCHED_FIFO);
- // 设置优先级为 51,52。
- param[i].__sched_priority = 51 + i;
- pthread_attr_setschedparam(&attr[i], ¶m[i]);
- // 设置线程属性:不要继承 main 线程的调度策略和优先级。
- pthread_attr_setinheritsched(&attr[i], PTHREAD_EXPLICIT_SCHED);
- // 创建线程
- pthread_create(&ppid[i], &attr[i],(void *)thread_routine, (void *)&index[i]);
- }
- else // 后两个创建普通线程
- {
- pthread_create(&ppid[i], 0, (void *)thread_routine, (void *)&index[i]);
- }
- }
- // 等待 4 个线程执行结束
- for (int i = 0; i < 4; i++)
- pthread_join(ppid[i], 0);
- for (int i = 0; i < 2; i++)
- pthread_attr_destroy(&attr[i]);
- }
编译成可执行程序的指令:
- gcc -o test test.c -lpthread
脑残测试开始
首先说一下预期结果,如果没有预期结果,那其他任何问题都压根不用谈了。
一共有 4 个线程:
- 线程索引号 1和2:是实时线程(调度策略是 SCHED_FIFO,优先级是 51,52);
- 线程索引号 3和4:是普通线程(调度策略是 SCHED_OTHER, 优先级是 0);
我的测试环境是:Ubuntu16.04,是一台安装在 Windows10 上面的虚拟机。
我期望的结果是:
- 首先打印 1 号和 2 号这两个线程的信息,因为它俩是实时任务,需要优先被调度;
- 1 号线程的优先级是 51,小于 2 号线程的优先级 52,因此应该是 2 号线程结束之后,才轮到 1 号线程执行;
- 3 号和 4 号线程是普通进程,它俩需要等到 1 号和 2 号线程全部执行结束之后才开始执行,并且 3 号和 4 号线程应该是交替执行,因为它俩的调度策略和优先级都是一样的。
我满怀希望的在工作电脑中测试,打印结果如下:
- ====> thread_index = 4
- thread_index 4: SCHED_OTHER
- thread_index 4: priority = 0
- ====> thread_index = 1
- thread_index 1: SCHED_FIFO
- thread_index 1: priority = 51
- ====> thread_index = 2
- thread_index 2: SCHED_FIFO
- thread_index 2: priority = 52
- thread_index 2: num = 0
- thread_index 4: num = 0
- ====> thread_index = 3
- thread_index 3: SCHED_OTHER
- thread_index 3: priority = 0
- thread_index 1: num = 0
- thread_index 2: num = 1
- thread_index 4: num = 1
- thread_index 3: num = 0
- thread_index 1: num = 1
- thread_index 2: num = 2
- thread_index 4: num = 2
- thread_index 3: num = 1
- 后面打印内容不用输出了,因为前面已经出现了问题。
问题很明显:为什么 4 个线程为什么被同时执行了?
1 号和 2 号这两个线程应该被优先执行啊,因为它俩是实时任务!
怎么结果是这个样子?彻底凌乱了,一点都不符合预期!
想不出个所以然,只能求助网络!但是没有找到有价值的线索。
其中有一个信息涉及到 Linux 系统的调度策略,这里记录一下。
Linux 系统中,为了不让实时任务彻底占据 CPU 资源,会让普通任务有很小的一段时间缝隙来执行。
在目录 /proc/sys/kernel 下面,有 2 个文件,用来限制实时任务占用 CPU 的时间:
- sched_rt_runtime_us: 默认值 950000 sched_rt_period_us: 默认值 1000000
意思是:在 1000000 微秒(1秒)的周期内,实时任务占用 950000 微秒(0.95秒),剩下的 0.05 秒留给普通任务。
如果没有这个限制的话,假如某个 SCHED_FIFO 任务的优先级特别高,恰巧出了 bug:一直占据 CPU 资源不放弃,那么我们压根就没有机会来 kill 掉这个实时任务,因为此时系统无法调度其他的任何进程来执行。
而有了这个限制呢,我们就可以利用这 0.05 秒的执行时间,来 kill 掉有 bug 的那个实时任务。
回到正题:资料上说,如果实时任务没有被优先调度,可以把这个时间限制删掉就可以了。方法是:
- sysctl -w kernel.sched_rt_runtime_us=-1
我照做之后,依旧无效!
换一台虚拟机,继续测试
难道是电脑环境的问题吗?于是,把测试代码放到另一台笔记本里的虚拟机 Ubuntu14.04 里测试。
编译的时候,有一个小问题,提示错误:
- error: ‘for’ loop initial declarations are only allowed in C99 mode
只要把编译指令中添加 C99 标准就可以了:
- gcc -o test test.c -lpthread -std=c99
执行程序,打印信息如下:
- ====> thread_index = 2
- ====> thread_index = 1
- thread_index 1: SCHED_FIFO
- thread_index 1: priority = 51
- thread_index 2: SCHED_FIFO
- thread_index 2: priority = 52
- thread_index 1: num = 0
- thread_index 2: num = 0
- thread_index 2: num = 1
- thread_index 1: num = 1
- thread_index 2: num = 2
- thread_index 1: num = 2
- thread_index 2: num = 3
- thread_index 1: num = 3
- thread_index 2: num = 4
- thread_index 1: num = 4
- thread_index 2: num = 5
- thread_index 1: num = 5
- thread_index 2: num = 6
- thread_index 1: num = 6
- thread_index 2: num = 7
- thread_index 1: num = 7
- thread_index 2: num = 8
- thread_index 1: num = 8
- thread_index 2: num = 9
- thread_index 2: exit
- ====> thread_index = 4
- thread_index 4: SCHED_OTHER
- thread_index 4: priority = 0
- thread_index 1: num = 9
- thread_index 1: exit
- ====> thread_index = 3
- thread_index 3: SCHED_OTHER
- thread_index 3: priority = 0
- thread_index 3: num = 0
- thread_index 4: num = 0
- thread_index 3: num = 1
- thread_index 4: num = 1
- thread_index 3: num = 2
- thread_index 4: num = 2
- thread_index 3: num = 3
- thread_index 4: num = 3
- thread_index 3: num = 4
- thread_index 4: num = 4
- thread_index 3: num = 5
- thread_index 4: num = 5
- thread_index 3: num = 6
- thread_index 4: num = 6
- thread_index 3: num = 7
- thread_index 4: num = 7
- thread_index 3: num = 8
- thread_index 4: num = 8
- thread_index 3: num = 9
- thread_index 3: exit
- thread_index 4: num = 9
- thread_index 4: exit
1 号和 2 号线程同时执行,完毕之后,再 3 号和 4 号线程同时执行。
但是这同样也不符合预期:2 号线程的优先级比 1 号线程高,应该优先执行才对!
不知道应该怎么查这个问题了,想不出思路,只好请教 Linux 内核的大神,建议检查一下内核版本。
这时,我才想起来在 Ubuntu16.04 这台虚拟机上因为某种原因,降过内核版本。
往这个方向去排查了一下,最后确认也不是内核版本的差异导致的问题。
比较结果,寻找差异
只好再回过头来看一下这两次次打印信息的差异:
- 工作电脑里的 Ubuntu16.04 中:4 个线程同时调度执行,调度策略和优先级都没有起作用;
- 笔记本里的 Ubuntu14.04 中:1 号和 2 号实时任务被优先执行了,说明调度策略起作用了,但是优先级没有起作用;
突然, CPU 的亲和性从脑袋里蹦了出来!
紧接着立马感觉到问题出在哪里了:这TMD大概率就是多核引起的问题!
于是我把这 4 个线程都绑定到 CPU0 上去,也就是设置 CPU 亲和性。
在线程入口函数 thread_routine 的开头,增加下面的代码:
- cpu_set_t mask;
- int cpus = sysconf(_SC_NPROCESSORS_CONF);
- CPU_ZERO(&mask);
- CPU_SET(0, &mask);
- if (pthread_setaffinity_np(pthread_self(), sizeof(mask), &mask) < 0)
- {
- printf("set thread affinity failed! \n");
- }
然后继续在 Ubuntu16.04 虚拟机中验证,打印信息很完美,完全符合预期:
- ====> thread_index = 1
- ====> thread_index = 2
- thread_index 2: SCHED_FIFO
- thread_index 2: priority = 52
- thread_index 2: num = 0
- 。。。
- thread_index 2: num = 9
- thread_index 2: exit
- thread_index 1: SCHED_FIFO
- thread_index 1: priority = 51
- thread_index 1: num = 0
- 。。。
- thread_index 1: num = 9
- thread_index 1: exit
- ====> thread_index = 3
- thread_index 3: SCHED_OTHER
- thread_index 3: priority = 0
- ====> thread_index = 4
- thread_index 4: SCHED_OTHER
- thread_index 4: priority = 0
- thread_index 3: num = 0
- thread_index 4: num = 0
- 。。。
- thread_index 4: num = 8
- thread_index 3: num = 8
- thread_index 4: num = 9
- thread_index 4: exit
- thread_index 3: num = 9
- thread_index 3: exit
至此,问题真相大白:就是多核处理器导致的问题!
而且这两台测试的虚拟机,安装的时候分配的 CPU 核心是不同的,所以才导致打印结果的不同。
真相大白
最后,再确认一下这 2 个虚拟机中的 CPU 信息:
Ubuntu 16.04 中 cpuinfo 信息:
- $ cat /proc/cpuinfo
- processor : 0
- vendor_id : GenuineIntel
- cpu family : 6
- model : 158
- model name : Intel(R) Core(TM) i5-8400 CPU @ 2.80GHz
- stepping : 10
- cpu MHz : 2807.996
- cache size : 9216 KB
- physical id : 0
- siblings : 4
- core id : 0
- cpu cores : 4
- 。。。其他信息
- processor : 1
- vendor_id : GenuineIntel
- cpu family : 6
- model : 158
- model name : Intel(R) Core(TM) i5-8400 CPU @ 2.80GHz
- stepping : 10
- cpu MHz : 2807.996
- cache size : 9216 KB
- physical id : 0
- siblings : 4
- core id : 1
- cpu cores : 4
- 。。。其他信息
- processor : 2
- vendor_id : GenuineIntel
- cpu family : 6
- model : 158
- model name : Intel(R) Core(TM) i5-8400 CPU @ 2.80GHz
- stepping : 10
- cpu MHz : 2807.996
- cache size : 9216 KB
- physical id : 0
- siblings : 4
- core id : 2
- cpu cores : 4
- 。。。其他信息
- processor : 3
- vendor_id : GenuineIntel
- cpu family : 6
- model : 158
- model name : Intel(R) Core(TM) i5-8400 CPU @ 2.80GHz
- stepping : 10
- cpu MHz : 2807.996
- cache size : 9216 KB
- physical id : 0
- siblings : 4
- core id : 3
- cpu cores : 4
- 。。。其他信息
在这台虚拟机中,正好有 4 个核心,而我的测试代码正好也创建了 4 个线程,于是每个核心被分配一个线程,一个都不闲着,同时执行。
因此打印信息中显示 4 个线程是并行执行的。
这个时候,什么调度策略、什么优先级,都不起作用了!(准确的说:调度策略和优先级,在线程所在的那个 CPU 中是起作用的)
如果我在测试代码中,一开始就创建 10 个线程,很可能会更快发现问题!
再来看看笔记本电脑里虚拟机 Ubuntu14.04 的 CPU 信息:
- $ cat /proc/cpuinfo
- processor : 0
- vendor_id : GenuineIntel
- cpu family : 6
- model : 142
- model name : Intel(R) Core(TM) i5-7360U CPU @ 2.30GHz
- stepping : 9
- microcode : 0x9a
- cpu MHz : 2304.000
- cache size : 4096 KB
- physical id : 0
- siblings : 2
- core id : 0
- cpu cores : 2
- 。。。其他信息
- processor : 1
- vendor_id : GenuineIntel
- cpu family : 6
- model : 142
- model name : Intel(R) Core(TM) i5-7360U CPU @ 2.30GHz
- stepping : 9
- microcode : 0x9a
- cpu MHz : 2304.000
- cache size : 4096 KB
- physical id : 0
- siblings : 2
- core id : 1
- cpu cores : 2
- 。。。其他信息
在这台虚拟机中,有 2 个核心,于是 2 个实时任务 1 号和 2 号被优先执行(因为是 2 个核心同时执行,所以这 2 个任务的优先级也就没什么意义了),结束之后,再执行 3 号和 4 号线程。
再思考一下
这一圈测试下来,真的想用键盘敲自己的脑袋,怎么就没有早点考虑到多核的因素呢?!
深层的原因:
- 之前的很多项目,都是 ARM、mips、STM32等单核情况,思维定式让我没有早点意识到多核这个屏体因素;
- 做过的一些 x86 平台项目,并没有涉及到实时任务这样的要求。一般都是使用系统默认的调度策略,这也是 Linux x86 作为通用电脑,在调度策略上所关注的重要指标:让每一个任务都公平的使用 CPU 资源。
随着 x86 平台在工控领域的逐渐应用,实时性问题就显得更突出、更重要了。
所以才有了 Windows 系统中的 intime,Linux 系统中的 preempt、xenomai 等实时补丁。
本文转载自微信公众号「 IOT物联网小镇」,可以通过以下二维码关注。转载本文请联系 IOT物联网小镇公众号。