












一 分布式共识算法 (Consensus Algorithm)
1 如何理解分布式共识?
多个参与者针对某一件事达成完全一致:一件事,一个结论。
已达成一致的结论,不可推翻。
2 有哪些分布式共识算法?
- Paxos:被认为是分布式共识算法的根本,其他都是其变种,但是 paxos 论文中只给出了单个提案的过程,并没有给出复制状态机中需要的 multi-paxos 的相关细节的描述,实现 paxos 具有很高的工程复杂度(如多点可写,允许日志空洞等)。
- Zab:被应用在 zookeeper 中,业界使用广泛,但没用抽象成通用 library。
- Raft:以容易理解著称,业界也涌现出很多 raft 实现,比如 etcd、braft、tikv 等。
二 Raft 介绍
1 特点:Strong Leader
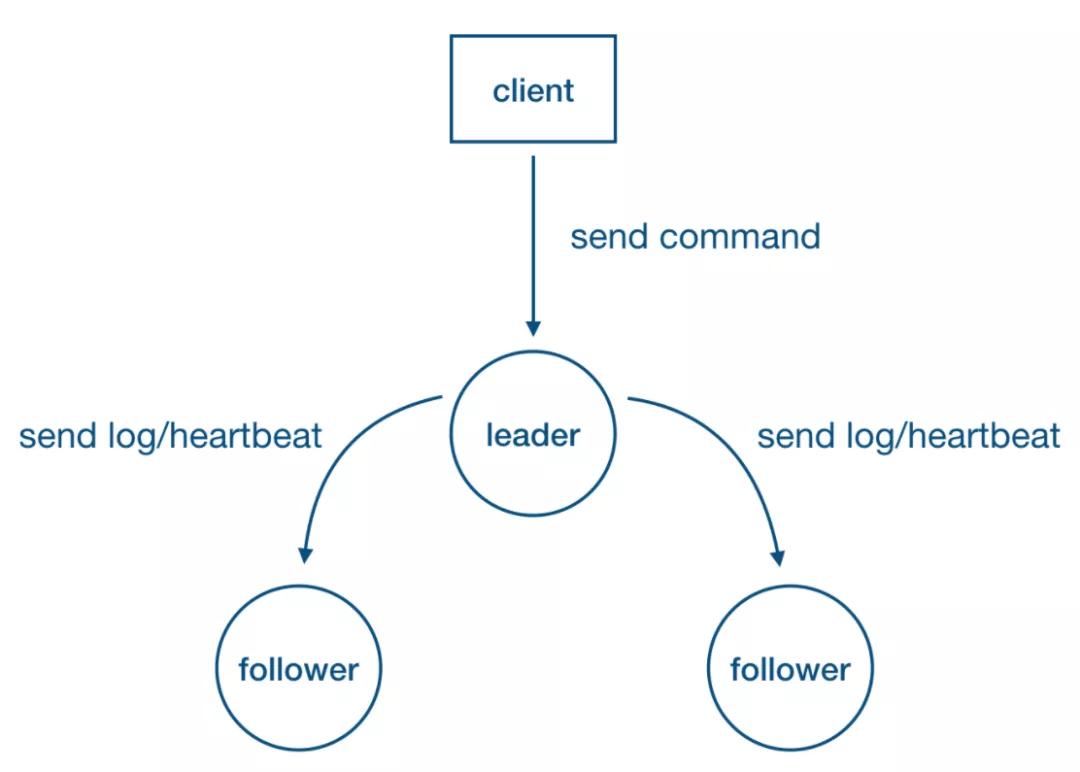
- 系统中必须存在且同一时刻只能有一个 leader,只有 leader 可以接受 clients 发过来的请求。
- Leader 负责主动与所有 followers 通信,负责将“提案”发送给所有followers,同时收集多数派的 followers 应答。
- Leader 还需向所有 followers 主动发送心跳维持领导地位(保持存在感)。
另外,身为 leader 必须保持一直 heartbeat 的状态。
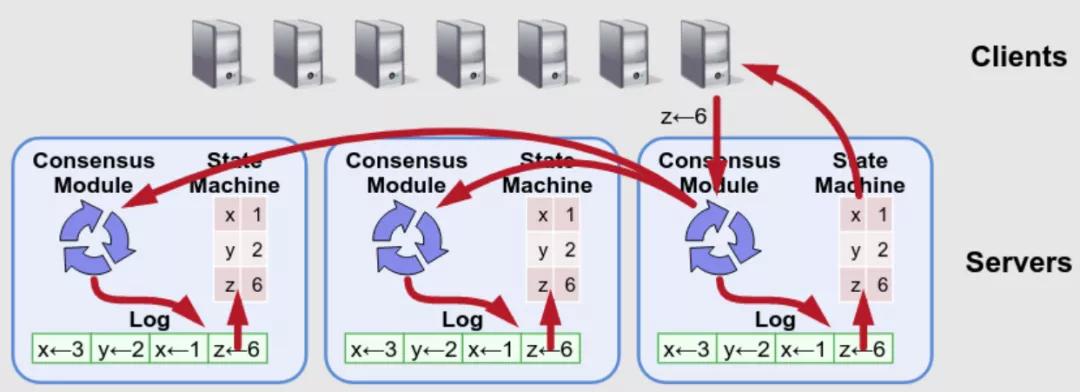
2 复制状态机
对于一个无限增长的序列a[1, 2, 3…],如果对于任意整数i, a[i]的值满足分布式一致性, 这个系统就满足一致性状态机的要求。
基本上所有的真实系统都会有源源不断的操作,这时候单独对某个特定的值达成一致显然是不够的。为了让真实系统保证所有的副本的一致性,通常会把操作转化为 write-ahead-log(WAL)。然后让系统中所有副本对 WAL 保持一致,这样每个副本按照顺序执行 WAL 里的操作,就能保证最终的状态是一致的。
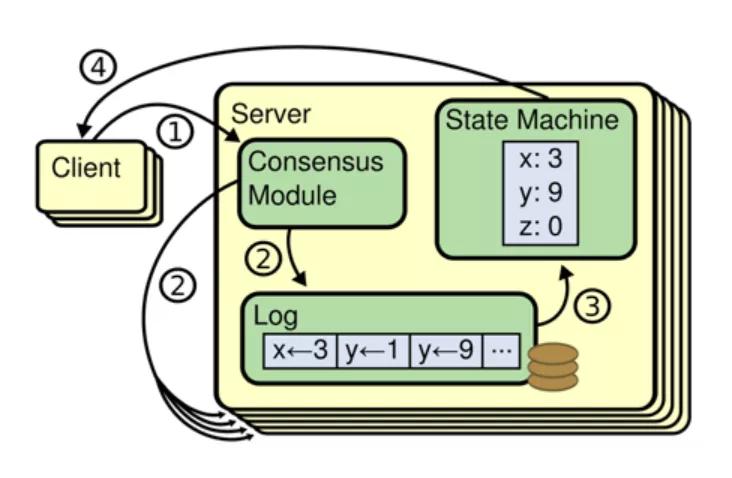
- Client 向 leader 发送写请求。
- Leader 把“操作”转化为 WAL 写本地 log 的同时也将 log 复制到所有 followers。
- Leader 收到多数派应答,将 log 对应的“操作”应用到状态机。
- 回复 client 处理结果。
3 Raft 中的基本概念
Raft-node 的 3 种角色/状态
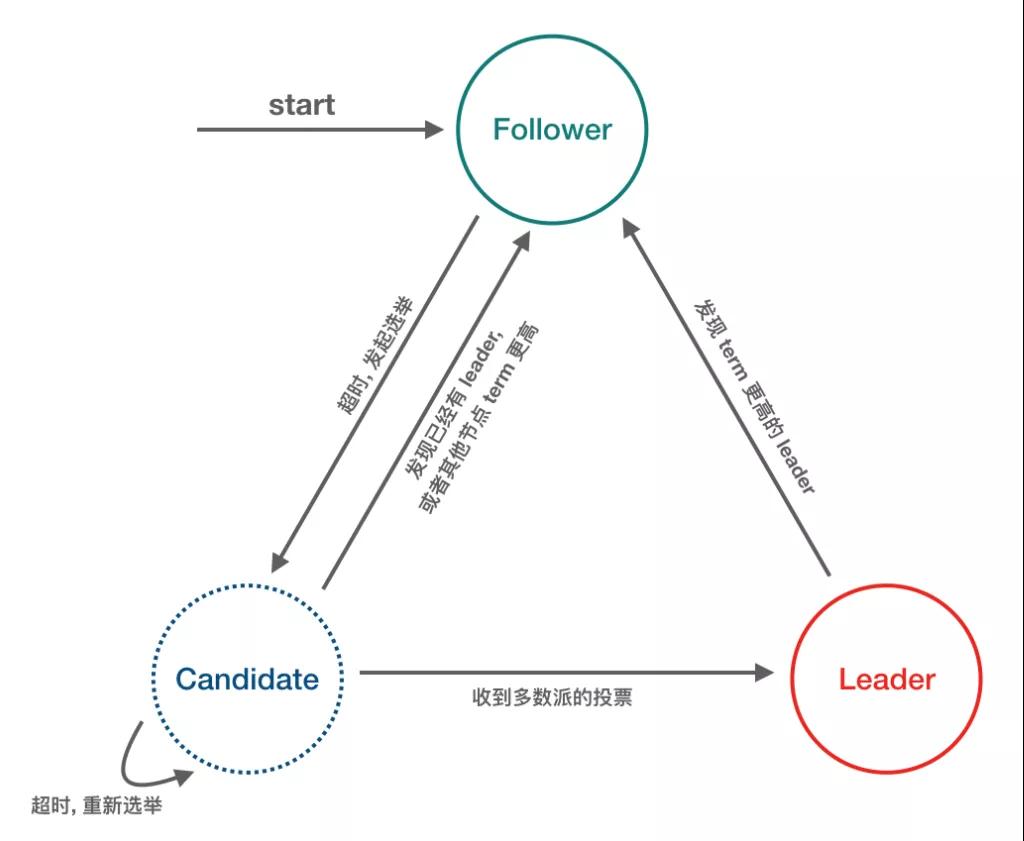
- Follower:完全被动,不能发送任何请求, 只接受并响应来自 leader 和 candidate 的 message, node启动后的初始状态必须是 follower。
- Leader:处理所有来自客户端的请求,以及复制 log 到所有 followers。
- Candidate:用来竞选一个新 leader (candidate 由 follower 触发超时而来)。
Message 的 3 种类型
- RequestVote RPC:Candidate 发出。
- AppendEntries (Heartbeat) RPC:Leader 发出。
- InstallSnapshot RPC:Leader 发出。
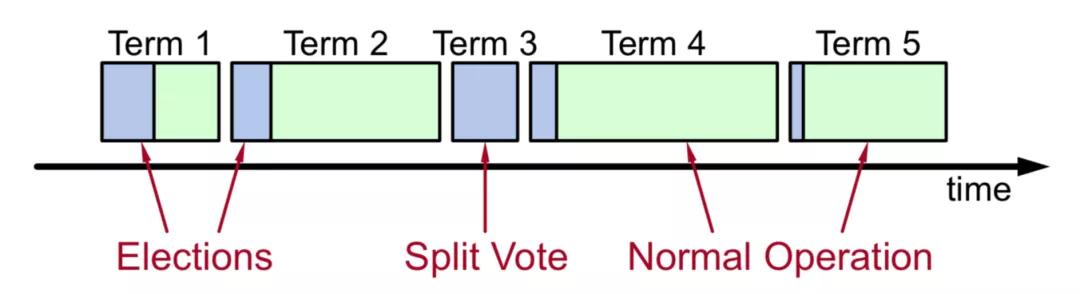
任期逻辑时钟
- 时间被划分为一个个任期(term),term id 按时间轴单调递增。
- 每一个任期的开始都是 leader 选举,选举成功之后,leader在任期内管理整个集群, 也就是“选举 + 常规操作”。
- 每个任期最多一个 leader,可以没有 leader (spilt-vote 导致)。
4 Raft 功能分解
Leader 选举
超时驱动:Heartbeat / Election timeout
随机的超时时间:降低选举碰撞导致选票被瓜分的概率
选举流程:Follower --> Candidate (选举超时触发)
- 赢得选举:Candidate --> Leader
- 另一个节点赢得选举:Candidate --> Follower
- 一段时间内没有任何节点器赢得选举:Candidate --> Candidate
选举动作:
- Current term++
- 发送 RequestVote RPC
New Leader 选取原则 (最大提交原则):
- Candidates include log info in RequestVote RPCs(index & term of last log entry)
- During elections, choose candidate with log most likely to contain all committed entries
- Voting server V denies vote if its log is “more complete”:(lastTermV > lastTermC) ||((lastTermV == lastTermC) && (lastIndexV > lastIndexC))
- Leader will have “most complete” log among electing majority
安全性:一个 term,最多选出一个 leader,可以没 leader,下一个 term 再选。

影响 raft 选举成功率的几个时间参数:
- RTT(Round Trip Time):网络延时
- Heartbeat timeout:心跳间隔,通常应该比 election timeout 小一个数量级,目的是让 leader 能够持续发送心跳来阻止 followers 触发选举
- Election timeout:Leader 与 followers 间通信超时触发选举的时间
- MTBF(Meantime Between Failure):Servers 连续常规故障时间间隔 RTT << Heartbeat timeout < Election timeout(ET) << MTBF
随机选主触发时间:Random(ET, 2ET)
日志复制
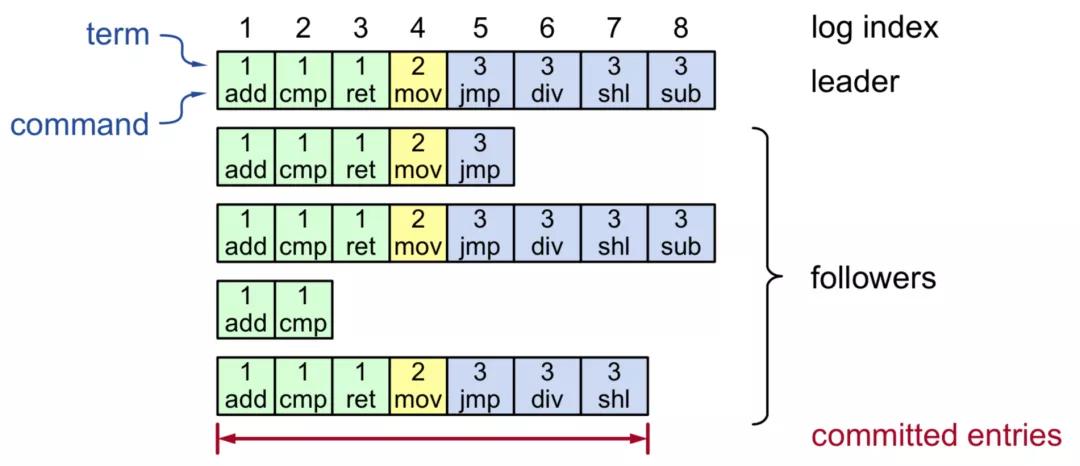
Raft 日志格式:
- (TermId, LogIndex, LogValue)
- 其中 (TermId, LogIndex) 能确定唯一一条日志
Log replication关键点:
- 连续性:日志不允许出现空洞
- 有效性:
- 不同节点,拥有相同 term 和 logIndex 的日志 value 一定相同
- Leader 上的日志一定是有效的
- Follower 上的日志是否有效,通过 leader 日志对比判断 (How?)
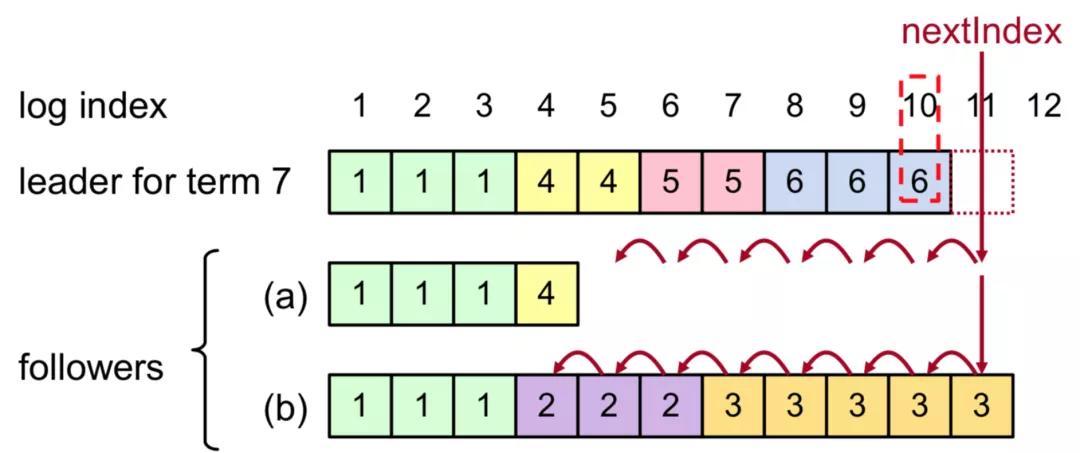
Followers 日志有效性检查:
- AppendEntries RPC 中还会携带前一条日志的唯一标识 (prevTermId, prevLogIndex)
- 递归推导
Followers 日志恢复:
- Leader 将 nextIndex 递减并重发 AppendEntries,直到与 leader 日志一致
Commit Index 推进
CommitIndex (TermId, LogIndex) :
- 所谓 commitIndex,就是已达成多数派,可以应用到状态机的最新的日志位置
- 日志被复制到 followers 后,先持久化,并不能马上被应用到状态机
- 只有 leader 知道日志是否达成多数派,是否可以应用到状态机
- Followers 记录 leader 发来的当前 commitIndex,所有小于等于 commitIndex 的日志均可以应用到状态机
CommitIndex推进:
- Leader 在下一个 AppendEntries RPC (也包括 Heartbeat)中携带当前的 commitIndex
- Followers 检查日志有效性通过则接受 AppendEntries 并同时更新本地 commitIndex, 最后把所有小于等于 commitIndex 的日志应用到状态机
AppendEntries RPC
- 完整信息:(currentTerm, logEntries[], prevTerm, prevLogIndex, commitTerm, commitLogIndex)
- currentTerm, logEntries[]:日志信息,为了效率,日志通常为多条
- prevTerm, prevLogIndex:日志有效性检查
- commitTerm, commitLogIndex:最新的提交日志位点(commitIndex)
阶段小结:现在我们能用 raft 做什么?
- 连续确定多个提案,确保集群中各个系统节点状态完全一致
- 自动选主,保证在只有少数派宕机的情况下持续可用
- 日志强同步,宕机后零数据丢失
三 SOFAJRaft
一个纯 Java 的 raft 算法实现库,使用 Java 重写了所有功能,并有一些改进和优化。
1 SOFAJRaft 整体功能
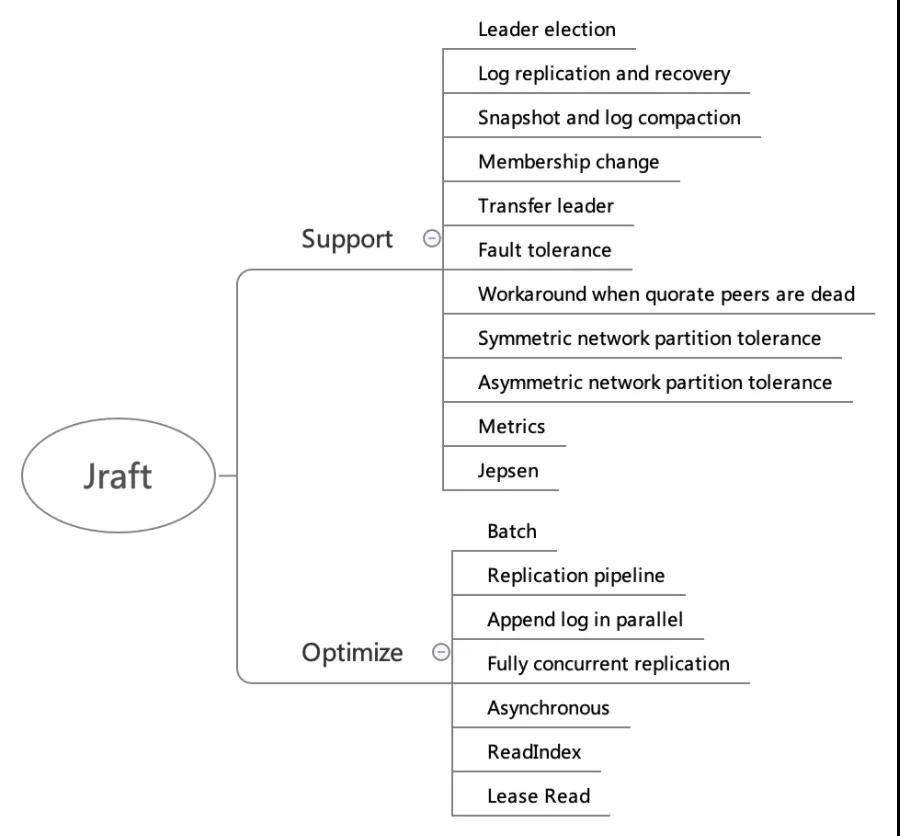
功能支持
Leader election:选主。
Log replication and recovery:日志复制和日志恢复,log recovery就是要保证已经被 commit 的数据一定不会丢失,log recovery 包含两个方面
- Current term 日志恢复,主要针对一些 follower 节点重启加入集群或者是新增 follower 节点
- Prev term 日志恢复,主要针对 leader 切换前后的日志一致性
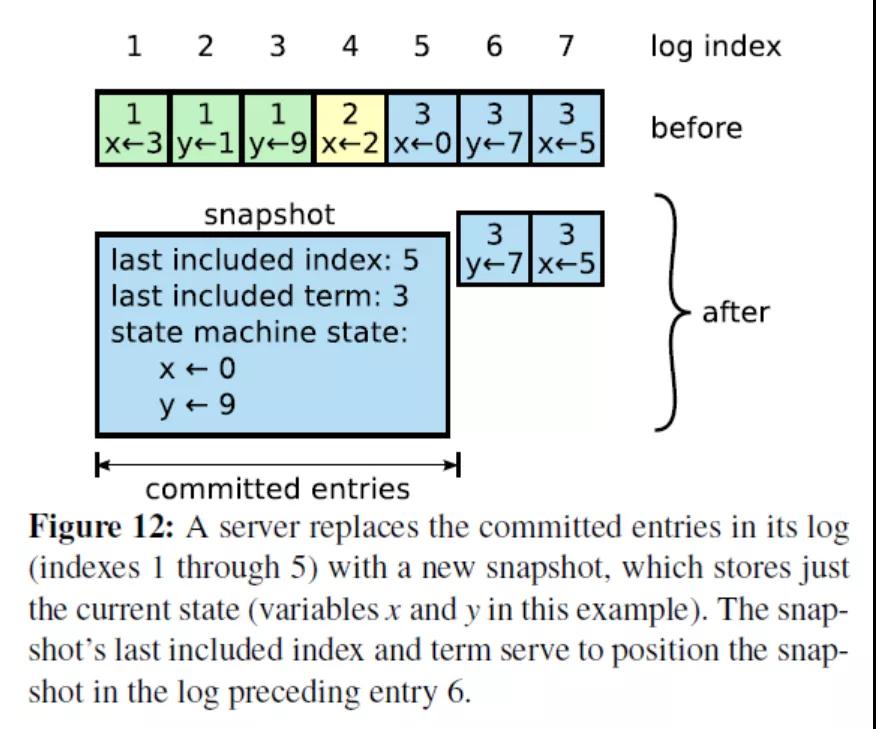
Snapshot and log compaction:定时生成 snapshot,实现 log compaction加速启动和恢复,以及InstallSnapshot 给 followers 拷贝数据。
Membership change:集群线上配置变更,增加节点、删除节点、替换节点等。
Transfer leader:主动变更 leader,用于重启维护,leader 负载平衡等。
Symmetric network partition tolerance:对称网络分区容忍性。
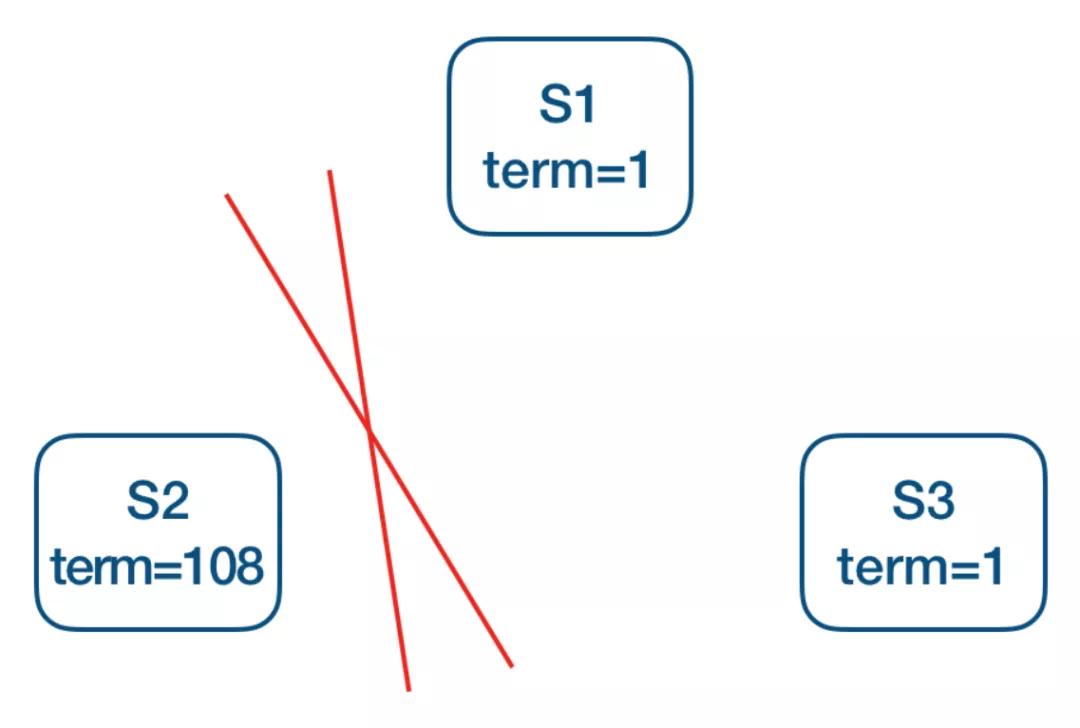
Pre-Vote:如上图 S1 为当前 leader,网络分区造成 S2 不断增加本地 term,为了避免网络恢复后S2发起选举导致正在良心工作的 leader step-down, 从而导致整个集群重新发起选举,在 request-vote 之前会先进行 pre-vote(currentTerm + 1,lastLogIndex, lastLogTerm),多数派成功后才会转换状态为 candidate 发起真正的 request-vote,所以分区后的节点,pre-vote不会成功,也就不会导致集群一段时间内无法正常提供服务。
Asymmetric network partition tolerance:非对称网络分区容忍性。
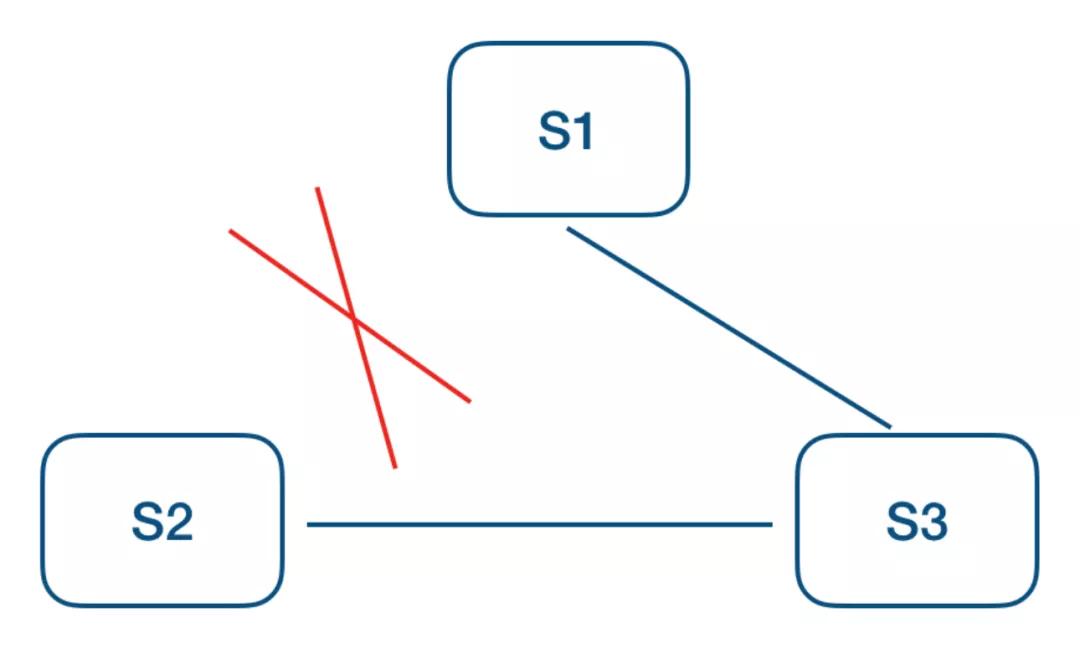
如上图 S1 为当前 leader,S2 不断超时触发选主,S3 提升 term 打断当前 lease,从而拒绝 leader 的更新,这个时候可以增加一个 trick 的检查,每个 follower 维护一个时间戳记录收到 leader 上数据更新的时间(也包括心跳),只有超过 election timeout 之后才允许接受 request-vote 请求。
Fault tolerance:容错性,少数派故障,不影响系统整体可用性。
- 机器掉电
- 强杀应用
- 慢节点(GC, OOM等)
- 网络故障
- 其他各种奇葩原因导致 raft 节点无法正常工作
Workaround when quorate peers are dead:多数派故障时整个 grop 已不具备可用性, 安全的做法是等待多数节点恢复,只有这样才能保证数据安全,但是如果业务更追求可用性,放弃数据一致性的话可以通过手动 reset_peers 指令迅速重建整个集群,恢复集群可用。
Metrics:SOFAJRaft 内置了基于 metrics 类库的性能指标统计,具有丰富的性能统计指标。
Jepsen:除了单元测试之外,SOFAJRaft 还使用 jepsen 这个分布式验证和故障注入测试框架模拟了很多种情况,都已验证通过。
随机分区,一大一小两个网络分区
- 随机增加和移除节点
- 随机停止和启动节点
- 随机 kill -9 和启动节点
- 随机划分为两组,互通一个中间节点,模拟分区情况
- 随机划分为不同的 majority 分组
性能优化
Batch:SOFAJRaft 中整个链路都是 batch 的,依靠 disruptor 中的 MPSC 模型批量消费,包括但不限于
- 批量提交 task
- 批量网络发送
- 本地 IO batch 写入,要保证日志不丢,一般每一条 log entry 都要进行 fsync, 比较耗时,SOFAJRaft 中做了合并写入的优化
- 批量应用到状态机
Replication pipeline:流水线复制,leader 跟 followers 节点的 log 同步是串行 batch 的方式,每个 batch 发送之后需要等待 batch 同步完成之后才能继续发送下一批(ping-pong), 这样会导致较长的延迟。可以通过 leader 跟 followers 节点之间的 pipeline 复制来改进,有效降低更新的延迟, 提高吞吐。
Append log in parallel:Leader 持久化 log entries 和向 followers 发送 log entries 是并行的。
Fully concurrent replication:Leader 向所有 follwers 发送 log 也是完全并发的。
Asynchronous:Jraft 中整个链路几乎没有任何阻塞,完全异步的,是一个 callback 编程模型。
ReadIndex:优化 raft read 走 raft log 的性能问题,每次 read,仅记录 commitIndex,然后发送所有 peers heartbeat 来确认 leader 身份,如果 leader 身份确认成功,等到 applied index >= commitIndex,就可以返回 client read 了,基于 ReadIndex 可以很方便的提供线性一致读,不过 commitIndex 是需要从 leader 那里获取的,多了一轮RPC。
Lease Read:通过租约(lease)保证 leader 的身份,从而省去了 readIndex 每次 heartbeat 确认 leader 身份,性能更好, 但是通过时钟维护 lease 本身并不是绝对的安全(jraft 中默认配置是 readIndex,因为 readIndex 性能已足够好)。
2 SOFAJRaft 设计
SOFAJRaft - Raft Node
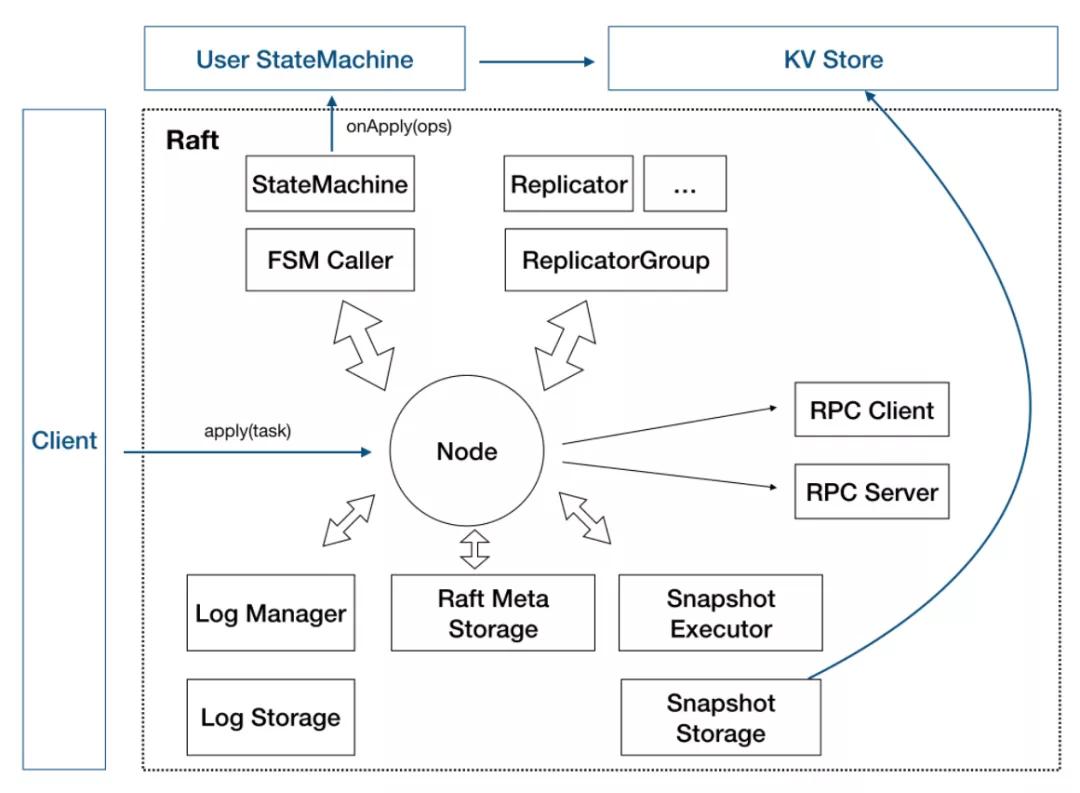
Node:Raft 分组中的一个节点,连接封装底层的所有服务,用户看到的主要服务接口,特别是 apply(task) 用于向 raft group 组成的复制状态机集群提交新任务应用到业务状态机。
存储:
- Log 存储,记录 raft 用户提交任务的日志,将从 leader 复制到其他节点上。LogStorage 是存储实现, LogManager 负责对底层存储的调用,对调用做缓存、批量提交、必要的检查和优化。
- Metadata 存储,元信息存储,记录 raft 实现的内部状态,比如当前 term、投票给哪个节点等信息。
- Snapshot 存储,用于存放用户的状态机 snapshot 及元信息,可选. SnapshotStorage 用于 snapshot 存储实现,SnapshotExecutor 用于 snapshot 实际存储、远程安装、复制的管理。
状态机:
- StateMachine:用户核心逻辑的实现,核心是 onApply(Iterator) 方法,应用通过 Node#apply(task) 提交的日志到业务状态机。
- FSMCaller:封装对业务 StateMachine 的状态转换的调用以及日志的写入等,一个有限状态机的实现, 做必要的检查、请求合并提交和并发处理等。
复制:
- Replicator:用于 leader 向 followers 复制日志,也就是 raft 中的 AppendEntries 调用,包括心跳存活检查等。
- ReplicatorGroup:用于单个 raft group 管理所有的 replicator,必要的权限检查和派发。
RPC 模块用于节点之间的网络通讯:
- RPC Server:内置于 Node 内的 RPC 服务器,接收其他节点或者客户端发过来的请求, 转交给对应服务处理。
- RPC Client:用于向其他节点发起请求,例如投票、复制日志、心跳等。
KV Store:SOFAJRaft 只是一个 lib,KV Store 是 SOFAJRaft 的一个典型的应用场景,把它放进图中以便更好的理解 SOFAJRaft。
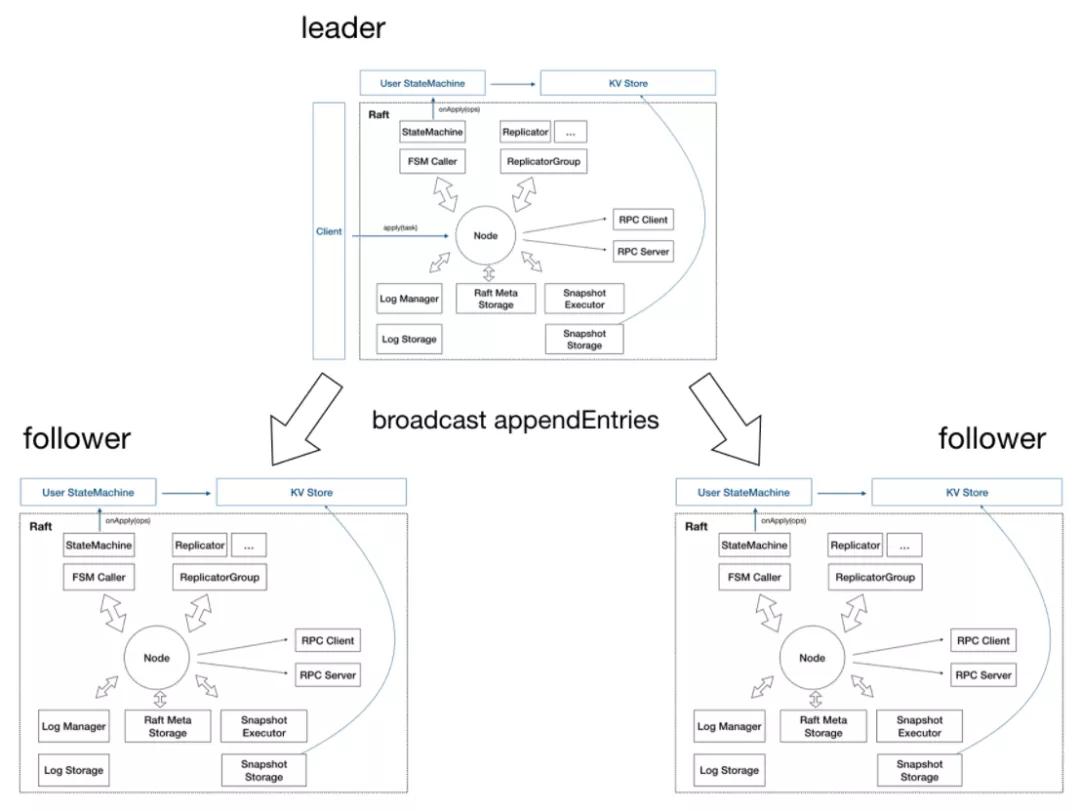
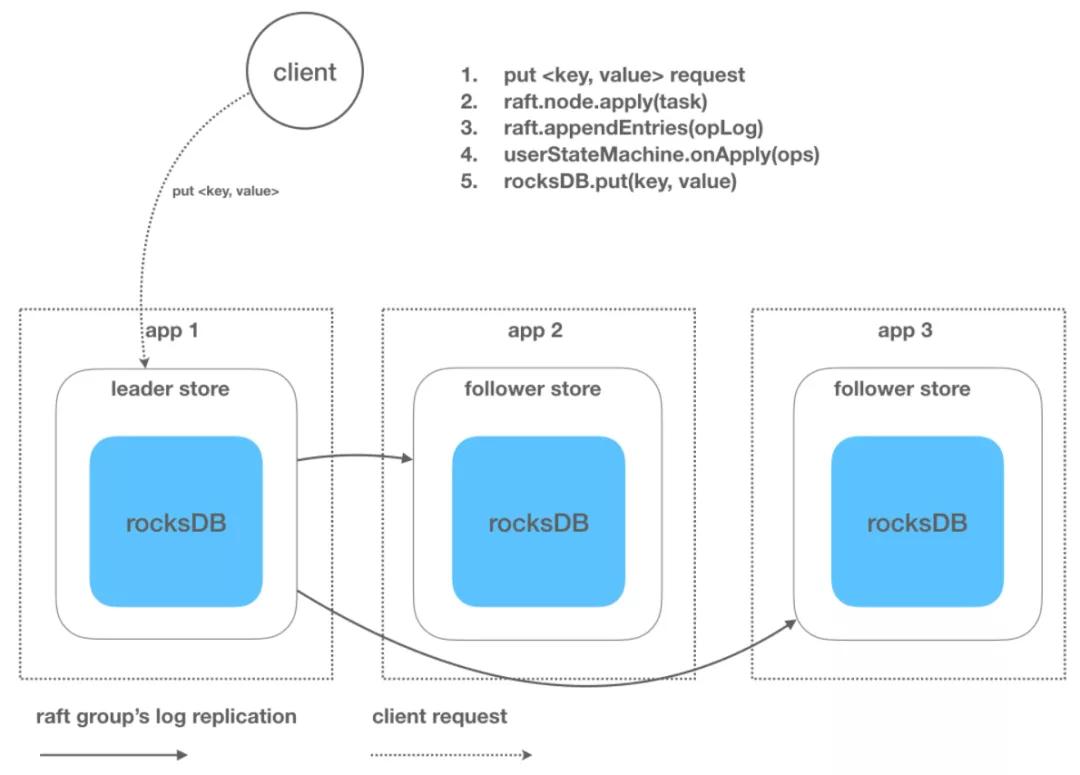
SOFAJRaft - Raft Group
SOFAJRaft - Multi Raft Group
3 SOFAJRaft 实现细节
高效的线性一致读
什么是线性一致读?
所谓线性一致读,一个简单的例子就是在 t1 的时刻我们写入了一个值, 那么在 t1 之后, 我们一定能读到这个值,不可能读到 t1 之前的旧值 (想想 Java 中的 volatile 关键字,说白了线性一致读就是在分布式系统中实现 volatile 语义)。
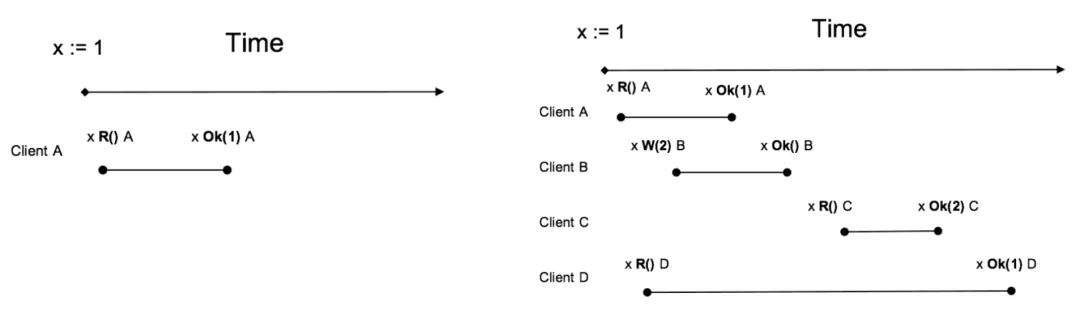
上图Client A、B、C、D均符合线性一致读,其中 D 看起来是 stale read,其实并不是, D 请求横跨了3个阶段,而读可能发生在任意时刻,所以读到 1 或 2 都行。
重要:接下来的讨论均基于一个大前提,就是业务状态机的实现必须是满足线性一致性的, 简单说就是也要具有 Java volatile 的语义。
1)直接点,是否可以直接从当前 leader 节点读?
怎么确定当前的 leader 真的是 leader(网络分区)?
2)最简单的实现方式:读请求走一遍 raft 协议
有什么问题?
- 不仅有日志写盘开销,还有日志复制的 RPC 开销,在读比重较大的系统中是无法接受的
- 还多了一堆的 raft “读日志”
3)ReadIndex Read
这是 raft 论文中提到过的一种优化方案,具体来说:
- 将当前自己 log 的 commit index 记录到一个 local 变量 ReadIndex 里面。
- 向其他节点发起一次 heartbeat,如果大多数节点返回了对应的 heartbeat response,那么 leader 就能够确定现在自己仍然是 leader (证明了自己是自己)。
- Leader 等待自己的状态机执行,直到 apply index 超过了 ReadIndex,这样就能够安全的提供 Linearizable Read 了, 也不必管读的时刻是否 leader 已飘走 (思考:为什么需要等到 apply index 超过了 ReadIndex 才可以执行读请求?)。
- Leader 执行 read 请求,将结果返回给 Client。
通过ReadIndex,也可以很容易在 followers 节点上提供线性一致读:
- Follower 节点向 leader 请求最新的 ReadIndex。
- Leader执行上面 i ~ iii 的过程(确定自己真的是 leader),并返回 ReadIndex 给 follower。
- Follower 等待自己的 apply index 超过了 ReadIndex (有什么问题?慢节点?)。
- Follower 执行 read 请求,将结果返回给 client。
ReadIndex小结:
- 相比较于走 raft log 的方式,ReadIndex 读省去了磁盘的开销,能大幅度提升吞吐,结合 SOFAJRaft 的 batch + pipeline ack + 全异步机制,三副本的情况下 leader 读的吞吐接近于 RPC 的上限。
- 延迟取决于多数派中最慢的一个 heartbeat response,理论上对于降低延时的效果不会非常显著。
4)Lease Read
Lease read 与 ReadIndex 类似,但更进一步,不仅省去了 log,还省去了网络交互。它可以大幅提升读的吞吐也能显著降低延时。
基本的思路是 leader 取一个比 election timeout 小的租期(最好小一个数量级),在租约期内不会发生选举,这就确保了 leader 不会变,所以可以跳过 ReadIndex 的第二步, 也就降低了延时。可以看到, Lease read 的正确性和时间是挂钩的,因此时间的实现至关重要,如果漂移严重,这套机制就会有问题。
实现方式:
- 定时 heartbeat 获得多数派响应, 确认 leader 的有效性 (在 SOFAJRaft 中默认的 heartbeat 间隔是 election timeout 的十分之一)。
- 在租约有效时间内,可以认为当前 leader 是 raft group 内的唯一有效 leader,可忽略 ReadIndex 中的 heartbeat 确认步骤(2)。
- Leader 等待自己的状态机执行,直到 apply index 超过了 ReadIndex,这样就能够安全的提供 Linearizable Read 了。
5)更进一步:Wait Free
到此为止 lease 省去了 ReadIndex 的第 2 步(heartbeat),实际上还能再进一步,省去第 3 步。
我们想想前面的实现方案的本质是什么? 当前节点的状态机达到“读”这一刻的时间点 相同或者更新的状态。
那么更严格一点的约束就是:当前时刻,当前节点的状态机就是最新的。
问题来了,leader 节点的状态机能保证一定是最新的吗?
- 首先 leader 节点的 log 一定是最新的,即使新选举产生的 leader,它也一定包含全部的 commit log,但它的状态机却可能落后于旧的 leader。
- 但是在 leader 应用了自己当前 term 的第一条 log 之后,它的状态机就一定是最新的。
- 所以可以得出结论:当 leader 已经成功应用了自己 term 的第一条 log 之后,不需要再取 commit index,也不用等状态机,直接读,一定是线性一致读。
小结:Wait Free 机制将最大程度的降低读延迟,SOFAJRaft 暂未实现 wait free 这一优化,不过已经在计划中。
在 SOFAJRaft 中发起一次线性一致读请求:
- // KV 存储实现线性一致读
- public void readFromQuorum(String key, AsyncContext asyncContext) {
- // 请求 ID 作为请求上下文传入
- byte[] reqContext = new byte[4];
- Bits.putInt(reqContext, 0, requestId.incrementAndGet());
- // 调用 readIndex 方法, 等待回调执行
- this.node.readIndex(reqContext, new ReadIndexClosure() {
- @Override
- public void run(Status status, long index, byte[] reqCtx) {
- if (status.isOk()) {
- try {
- // ReadIndexClosure 回调成功, 可以从状态机读取最新数据返回
- // 如果你的状态实现有版本概念, 可以根据传入的日志 index 编号做读取
- asyncContext.sendResponse(new ValueCommand(fsm.getValue(key)));
- } catch (KeyNotFoundException e) {
- asyncContext.sendResponse(GetCommandProcessor.createKeyNotFoundResponse());
- }
- } else {
- // 特定情况下, 比如发生选举, 该读请求将失败
- asyncContext.sendResponse(new BooleanCommand(false, status.getErrorMsg()));
- }
- }
- });
- }
四 SOFAJRaft 应用场景
1 SOFAJRaft 可以做什么
- 选举
- 分布式锁服务,比如 zookeeper
- 高可靠的元信息管理
- 分布式存储系统,如分布式消息队列、分布式文件系统、分布式块系统等等。
2 用户案例
- AntQ Streams QCoordinator:使用 SOFAJRaft 在 coordinator 集群内做选举、元信息存储等功能。
- Schema Registry:高可靠 schema 管理服务,类似 kafka schema registry。
- SOFA 服务注册中心元信息管理模块:IP 数据信息注册,要求写数据达到各个节点一致, 并且在少数派节点挂掉时保证不影响数据正常存储。
- RheaKV:基于 SOFAJRaft 和 rocksDB 实现的嵌入式、分布式、高可用、强一致的 KV 存储类库。
3 简单实践:基于 SOFAJRaft 设计一个简单的 KV Store
到目前为止,我们似乎还没看到 SOFAJRaft 作为一个 lib 有什么特别之处, 因为 SOFAJRaft 能办到的 zk,etcd 似乎基本上也都可以办到, 那么 SOFAJRaft 算不算重复造轮子?
为了说明 SOFAJRaft 具有很好的想象空间以及扩展能力,下面再介绍一个基于 SOFAJRaft 的复杂一些的实践。
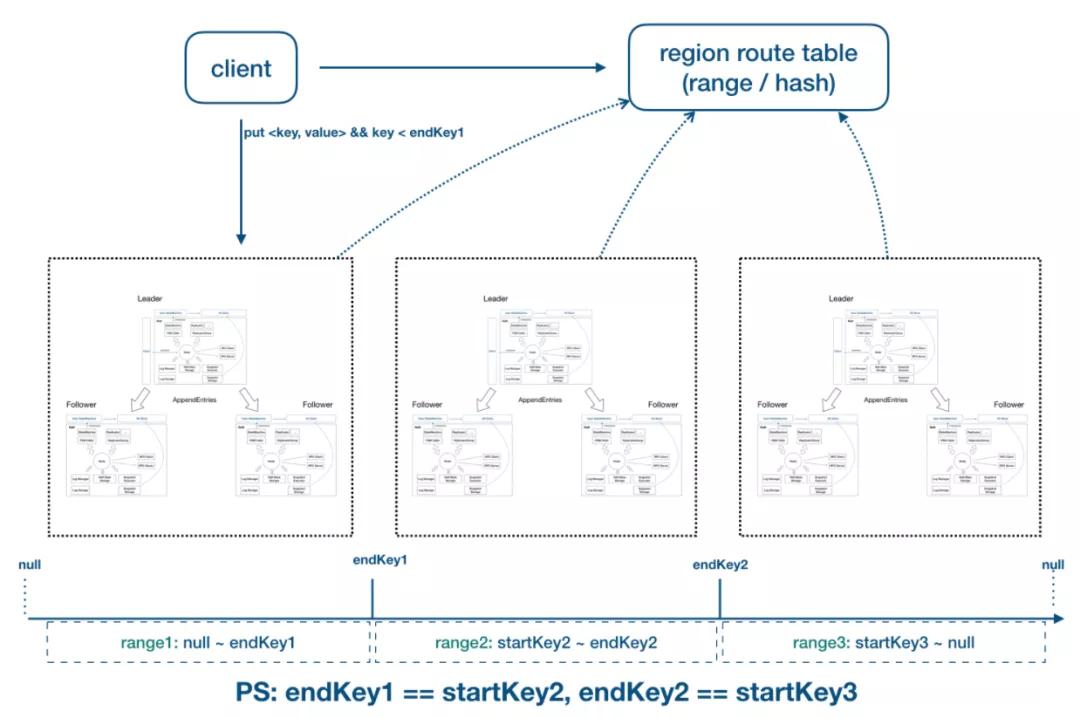
4 复杂一点的实践:基于 SOFAJRaft 的 Rhea KV 的设计
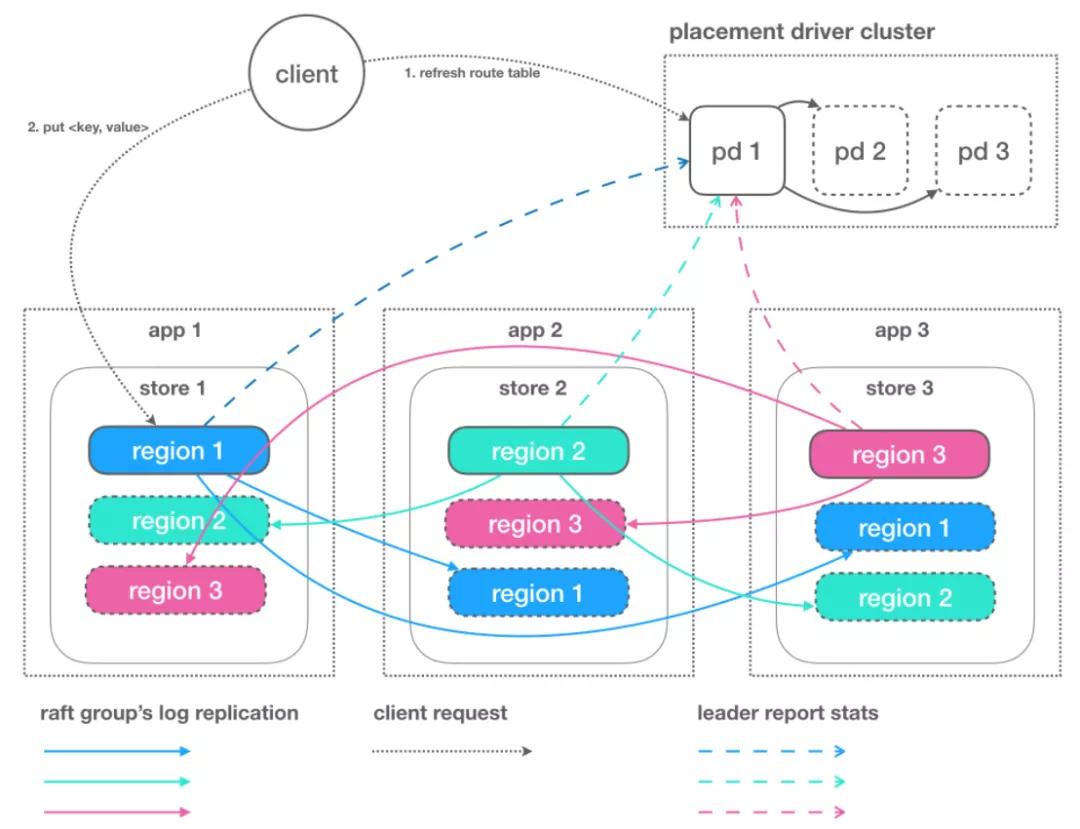
功能名词
- PD:全局的中心总控节点, 负责整个集群的调度, 不需要自管理的集群可不启用 PD (一个PD可管理多个集群,基于 clusterId 隔离)。
- Store:集群中的一个物理存储节点,一个 store 包含一个或多个 region。
- Region:最小的 KV 数据单元,每个 region 都有一个左闭右开的区间 [startKey, endKey),可根据请求流量/负载/数据量大小等指标自动分裂以及自动副本搬迁。
特点
- 嵌入式
- 强一致性
- 自驱动:自诊断,自优化,自决策,自恢复。以上几点(尤其2, 3)基本都是依托于 SOFAJRaft 自身的功能来实现。


















