













本文转自雷锋网,如需转载请至雷锋网官网申请授权。
说起软体机器人,或许很多人都不觉得陌生了。
软体机器人的发展离不开包括材料学、机器人学、生物力学、传感与控制在内的多学科进步,近年来相关学科迅速发展,各类软体机器人也开始涌现。
机器人与自动化国际会议 ICRA 2017 的会场上,曾参与发明达芬奇手术机器人的香港中文大学机械与自动化工程学系副教授 Samuel Au 这样表示:
软体机器人在医疗领域的应用十分广泛,甚至会转变医疗机器人的范式。软体机器人是手术机器人的终极目标。
当然,除了医疗领域,软体机器人还有一个广阔的市场——玩具。
这个市场中,迪士尼对软体机器人颇为关注。就在去年,迪士尼研究院(Disney Research)曾基于算法和一种特殊的拉伸传感器,让软体机器人有了「本体感知」的能力。
最近,在世界领先的机器人专家之一 Daniela Rus 教授的领导下,MIT CSAIL 也做出了类似的成果:基于他们开发的算法,软体机器人体内的传感器得到了优化,因此能更好地在环境中感受自身、与环境互动。
相关论文题为 Co-Learning of Task and Sensor Placement for Soft Robotics(软体机器人任务与传感器布置的协同学习),将于 2021 年 4 月的 IEEE International Conference on Soft Robotics(IEEE 软体机器人国际会议)上进行展示。

让软体机器人回答出“我在哪”
很多人的印象中,机器人都有着坚硬的外壳,充满金属感,这便是传统的刚性机器人。通常,刚性机器人关节、肢体的有限阵列通过控制映射和运动规划的算法使得计算易于掌控。
不同于刚性机器人,软体机器人不论结构还是材料都是非线性的,且拥有多自由度,因此其动作任务更加复杂,因此对算法的要求非常高。
正如论文介绍的那样:
软体机器人必须在一个无限维的状态空间中进行推理,而映射这个连续状态空间并不简单(特别是在基于有限的离散传感器集工作的情况下,毕竟传感器位置对机器人任务学习模型的丰富性有着深远影响)。
上面这段话通俗来讲就是,软体机器人要想可靠地完成程序设定的任务,它们需要知道自己所有身体部位所在的位置,而由于软体机器人几乎可以以无限种方式变形,因此这项任务相当艰巨。
为了让软体机器人回答出“我在哪”的问题,此前科学家们的策略是:用一个外部摄像头来绘制机器人的位置,并将信息反馈到机器人的控制程序中。
但 MIT CSAIL 的想法是:创造一个不受外界帮助的软体机器人。
在研究团队看来:
不能在机器人身上安装无数个传感器,真正的问题是:要有多少传感器、要把传感器放在哪,才有最大的性价比?
正因如此,MIT CSAIL 将目光聚焦于深度学习。
他们开发了一种算法,能够帮助工程师设计出收集更多与周围环境相关的有用信息的软体机器人。
具体而言,这种新的协同学习传感器放置和复杂任务的表示方法,可以处理机载传感器信息,从而学习突出和稀疏的位置选择,优化传感器在机器人体内的位置,保证机器人获得最优的任务性能。
论文合著者之一 Alexander Amini 表示:
这一系统不仅可以学习给定的任务,而且还能学习如何以最佳方式设计机器人来解决任务。传感器的放置是一个非常难解决的问题,所以这个解决方案是非常令人兴奋的。
论文显示,由于许多软体机器人在本质上是呈节点的,因此新架构采用了基于点-云(point-cloud-based)的学习和概率稀疏化。他们的方法将传感器设计视为学习的双重过程,在单一的端到端培训过程中结合了物理和数字设计。
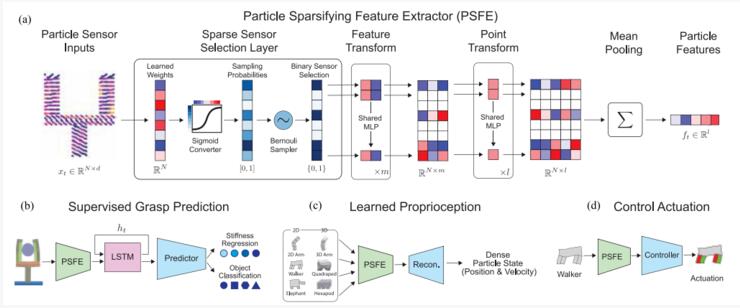
在论文中,研究人员将这种架构称为 PSFE 网络(即 point sparsification and feature extraction network,点稀疏化和特征提取网络)。
PSFE 网络能够同时学习传感器的读数表示和传感器的位置。如下图所示,PSFE 网络是研究团队做的所有演示和应用的核心——演示包括对象抓取预测(B)、学习本体感受(C)和控制(D)。
事实证明,在放置传感器方面,算法的表现大大超过了人类直觉!
总结来看,这项成果的主要贡献在于:
-
对应变和应变速率的测量:用于推理软体机器人状态的神经结构;
-
一种适用于下游任务的最小集稀疏化概率传感器表示,以及一种超越了自动化和人工基线的算法;
-
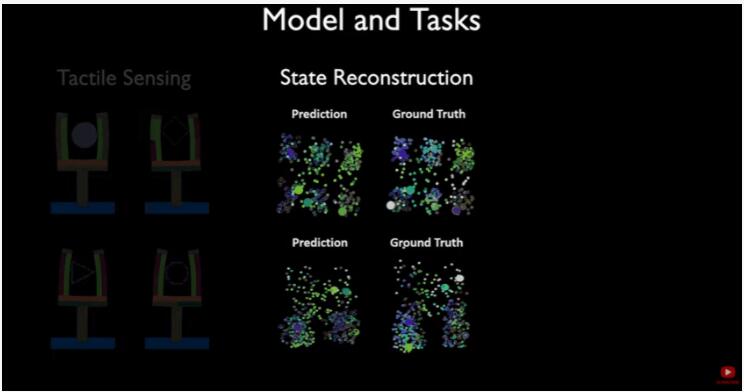
两个任务(7 种软性机器人形态的触觉感知和本体感受)中任务学习和传感器放置协同设计的演示。
论文合著者之一 Andrew Spielberg 表示:
我们的工作有助于实现机器人设计自动化。除了开发控制机器人运动的算法,我们还需要考虑如何对这些机器人进行感知,以及如何与机器人的其他组件相互作用。未来如果在工业上加以应用,影响可能是立竿见影的。
关于作者
该论文作者为包括 Andrew Spielberg 在内的三位 MIT CSAIL 在读博士生以及两位 MIT 教授 Daniela Rus 和 Wojciech Matusik。
五位作者中,最有名气的便是 Daniela Rus 教授。
【图源 HyperAI 超神经 】
Daniela Rus 是 MIT CSAIL 主任、Andrew and Erna Viterbi 电气工程和计算机科学教授、IEEE Fellow、AAAI Fellow、美国国家工程院院士,曾于康奈尔大学获得计算机科学博士学位。主要研究领域涵盖机器人、移动计算和数据科学。
前不久,福布斯 AI 专栏作家、创业投资公司 Highland Capital Partners 风投专家 Rob Toews 曾撰文,列举出了 8 位具有代表性的 AI 领域女性领袖,这 8 位女性领袖中包含李飞飞、NVIDIA 工程副总裁、Coursera 创始人,也有 Daniela Rus 的名字。
2016 年,雷锋网编辑曾与 Daniela Rus 展开了一场深入对谈。
在被问到“机器学习或深度学习最终是否能帮助我们制造出通用型人工智能(AGI)”时,这位 AI 大牛谈到,尚无法判断深度学习最后到底能不能实现 AGI。
在她看来,深度学习可以说是很有潜力,但也存在一些问题:
-
深度学习需要大量数据去训练,也就意味着需要很深的理解,而通用型智能的学习方法应该要更“通用”才对。
-
深度学习还是会犯错。
-
实际上我们还不太清楚深度学习的运作原理,不太清楚为什么它表现得这么好。
也就是说,只有当我们对深度学习甚至我们自己有更深的了解之后,才能回答这个问题。
当时 Daniela Rus 也坦言,自己最感兴趣的研究领域是机器人:
我我们正在研究如何制造更好的自动化系统,自动化系统能深刻的改变这个世界。改变人们完成任务的方式,并且可以让我们更好的理解彼此。
如果我们能造出一台各种行为表现的都和生物很像的机器。那这台机器的内在原理可能跟生物的内在原理比较相似,我们可能可以通过这种研究加深对我们自己的理解。
如今看来,在 Daniela Rus 带领下的 MIT CSAIL 朝着自动化系统又迈进了一步。
















