本文经AI新媒体量子位(公众号ID:QbitAI)授权转载,转载请联系出处。
你见过能灵活夹取鸡蛋、可取可放的机器人吗?
不仅如此,甚至还能穿针引线:
就算是往它拿着的瓶子里倒水,也不会掉:
这是来自香港城市大学、香港大学、CMU和南方科技大学的科学家,联手打造出的一款机器人触觉皮肤,效果堪比人类皮肤——
不仅可以精准感知到力度方向和大小,还能准确定位外界刺激的位置。
目前,这一研究成果已登上Science子刊《Science Robotics》。
这样神奇的触觉皮肤,究竟是怎么做出来的?
将AI与磁性薄膜结合
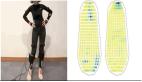
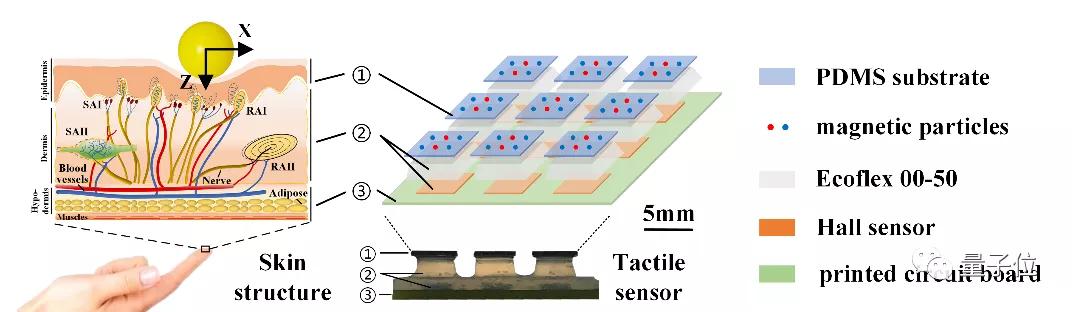
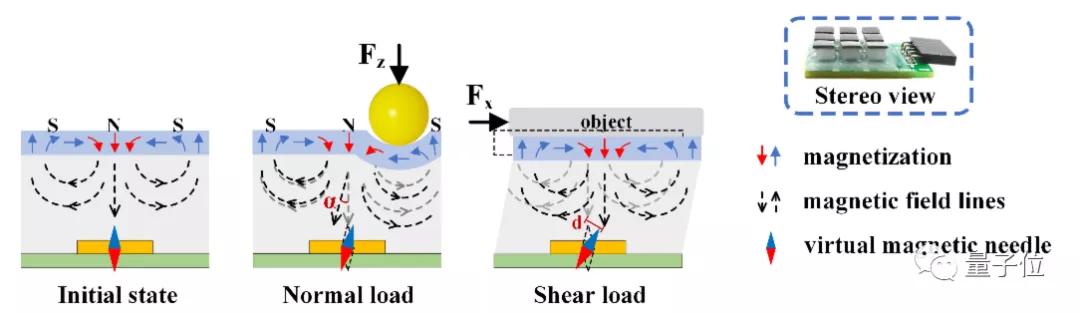
首先,这种磁性皮肤,用到了一种基于磁性薄膜的触觉传感器,来感知力的大小与方向。
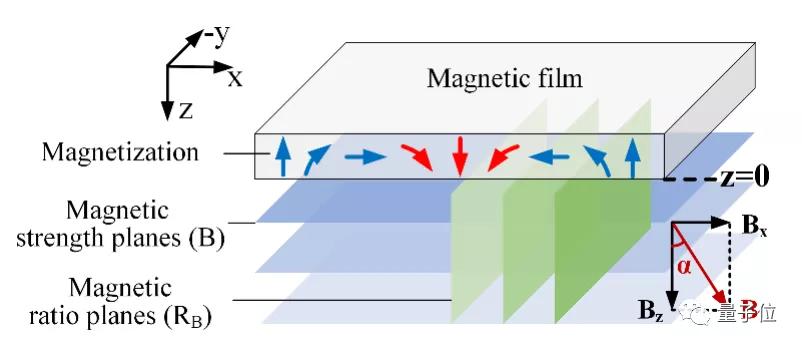
这种触觉传感器的核心,由一层经过单面多级正弦磁化的磁膜、以及嵌在印刷电路板上的霍尔传感器构成。
经单面多级正弦磁化后的磁体,又被称作Halbach阵列,它的特点是在削弱一侧磁场的同时,能极大地增强另一侧磁场。
论文一作闫友璨发现,这种阵列还有一种特殊性质,使得磁膜能互不干扰地测量正压力和切向力,使得受力反馈更精确。
这种技术,多被用于磁悬浮列车、粒子加速器、电磁炮等领域(冰箱贴也是类似的原理)。
当外力施加在磁膜上时,霍尔传感器将测量到由磁膜变形所引起的磁场变化,进而测量出施加外力的大小和方向。
当然,磁膜和霍尔传感器之间,可以填充不同厚度和弹性的硅胶,来调节传感器的灵敏度和量程。
这就完了?
当然不,这种磁性皮肤,还用到了深度学习的算法,来更加准确地定位外界刺激。
而且,与人类皮肤一样,这种定位的精度可以超越传感器自身的物理分辨率(两个传感单元之间的距离),即达到所谓的超分辨率。
磁性皮肤会先通过霍尔传感器,大致分析出小球的施力位置在S5领域的右上角。
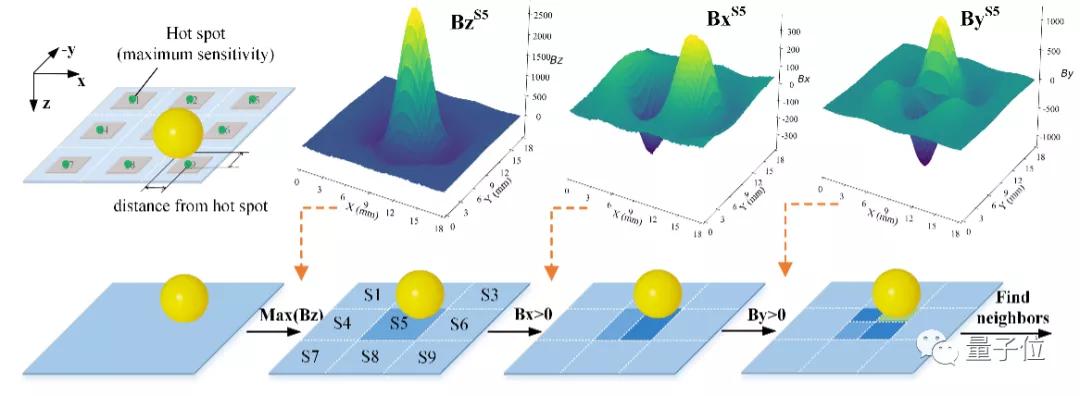
然后,再通过神经网络进行定量计算,将小球的接触位置定位到S5右上角的坐标(X,Y)处。

这种方法确认的定位精度,可以达到0.1毫米,分辨率为6毫米传感单元间距的60倍。
做出来的磁性皮肤,效果如何呢?
定位精度堪比人类皮肤
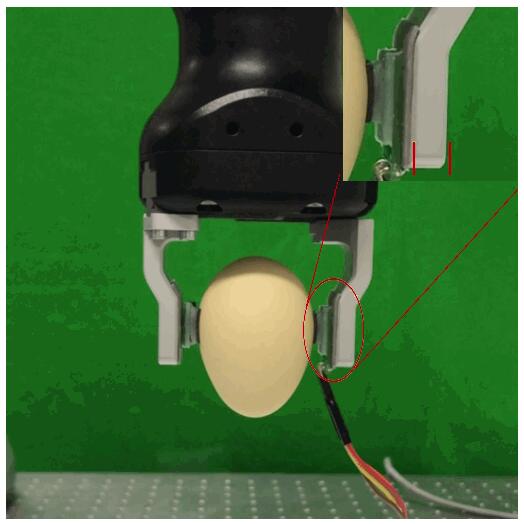
这个触觉皮肤,不仅能实时反馈受力情况、自适应抓取易碎物体,还能根据受力变化和定位精度,及时调整力的大小和方向。
例如,在夹取鸡蛋的时候,如果遇到人类外力扯拽,机械手则会自动增大夹持力;而如果松手的话,机械手也会逐渐松开夹爪,避免鸡蛋被夹碎。
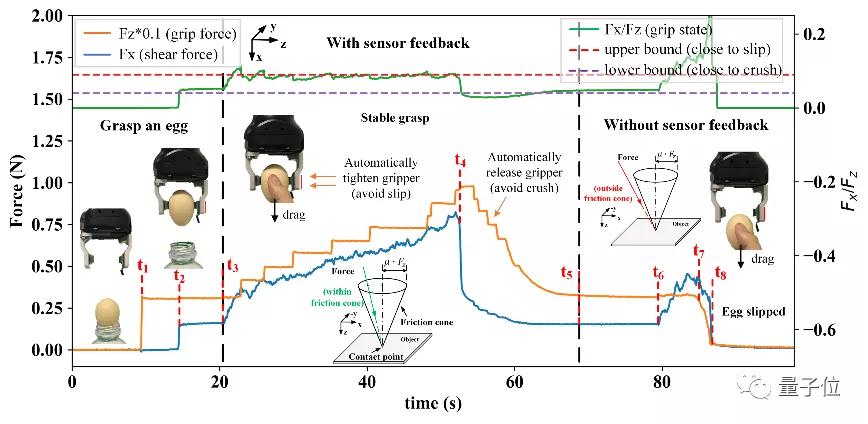
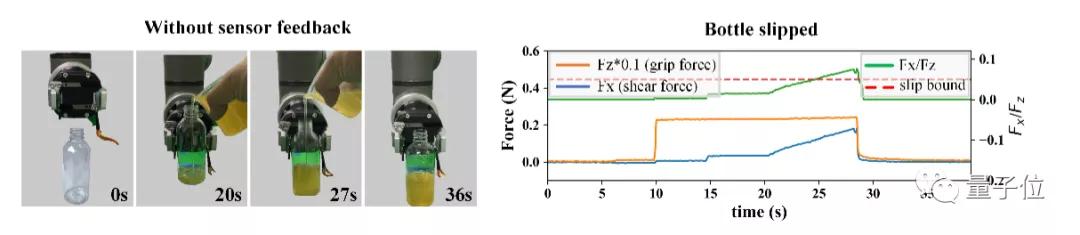
这种根据力反馈,来改变施力大小的实验,在注水实验中体现得更加明显。
如果有了力反馈,夹爪在夹住瓶子的时候,就能根据瓶子注水的重量来改变用力大小,使得水瓶不至于滑落。
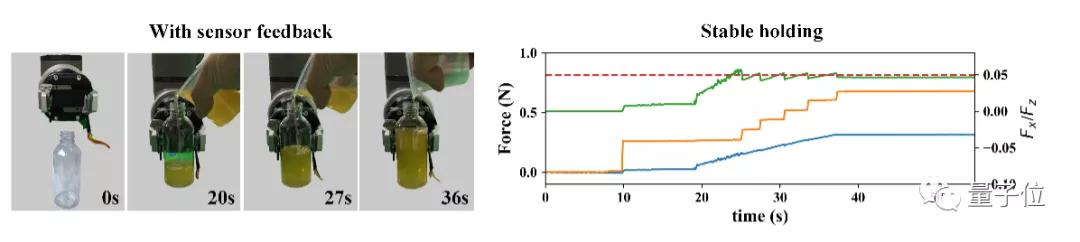
但如果关闭这种能反馈力度的触觉功能,瓶子注水到一定程度,就从夹爪中滑落了。
不仅受力大小、方向的反馈非常精准,这款触觉皮肤对外界刺激的定位,也非常精确。
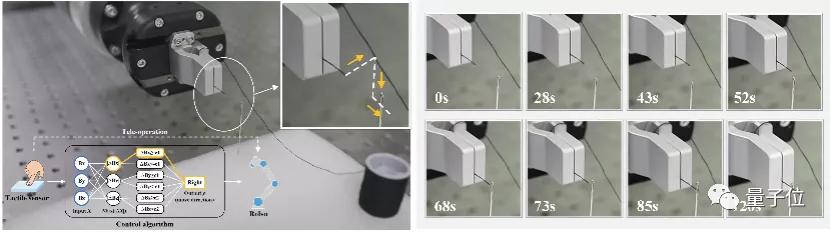
例如,通过远程按压触觉皮肤,就可以遥控机械夹爪,轻轻松松将发丝细度的针线穿过针眼。
据论文作者表示,他们利用深度学习,将超分辨率提升到了60倍,堪比人类皮肤约40倍的超分辨率。
作者表示,这款皮肤极大地减少了机器人皮肤中的传感单元和布线,提升了智能皮肤的易用性。
或许,将来用上这款皮肤的智能机器人,也能拥有和我们一样的触觉了~
作者介绍
论文一作闫友璨,是香港城市大学的博士生,研究方向为机械与生物医学工程。
这项工作,由来自香港城市大学生物医学工程系的申亚京教授课题组、和香港大学计算机系的潘佳教授课题组共同完成。
其中,申亚京、潘佳为论文的共同通讯作者。
团队的其他成员,则分别来自香港城市大学、CMU和南方科技大学。
论文地址:
https://robotics.sciencemag.org/content/6/51/eabc8801
参考链接:
https://scholar.google.com/citations?user=eY8D8JYAAAAJ&hl=en