













随着科技创新成为时代主旋律,相信诸如“自动驾驶取代司机”、“50%以上的工作岗位将会被AI取代”以及“机器人大规模列装,无人工厂成真”之类的新闻标题早已充斥着各位的手机屏幕。
但这种技术名词的滥用往往会在不经意间使大众混淆“机器人”与“人工智能”(AI)两个概念。
机器人技术是AI的一部分吗?AI是机器人技术的一部分吗?这两个名词的区别是什么?通过今天的这篇文章,我们来解答这些问题。
人工智能正当时
首先要说明的是,机器人和人工智能完全不是一回事,二者的目的非常不同。甚至可以说,这两个领域几乎是完全各自独立的。
人工智能(AI)是计算机科学的一个分支,它涉及开发计算机程序来完成原本需要人类智慧的任务。AI算法可以解决学习、感知、解决问题、语言理解和/或逻辑推理。
人工智能有两大类:通用人工智能(General AI,AGI)和狭义人工智能(Narrow AI),有时还会从通用人工智能中分化出远超人类的超人工智能(Super AI)。
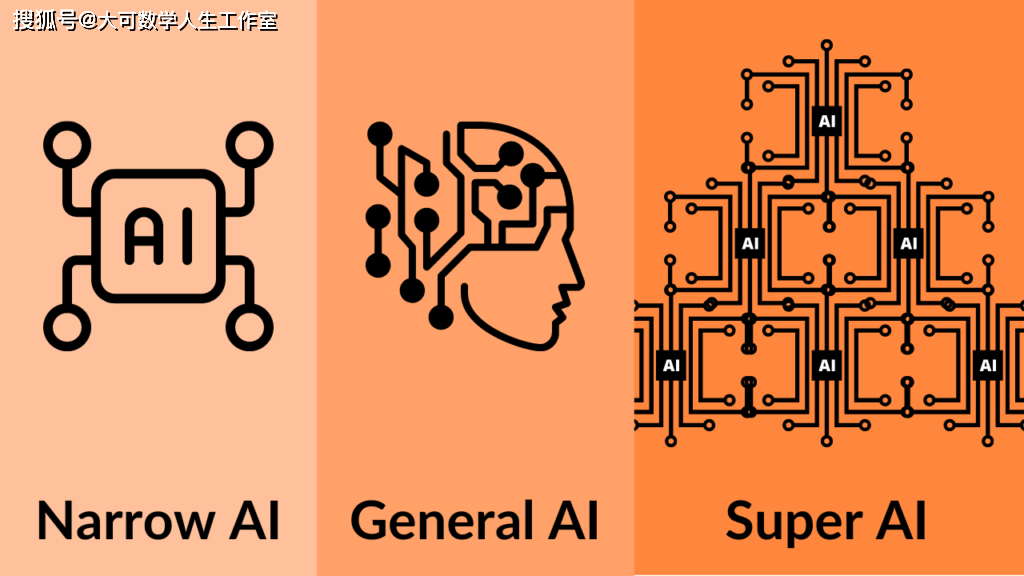
广义人工智能指的是与人类智力相当或更高的整体系统,它可以完成各种任务,从下棋到在商店里招呼顾客,再到创作艺术品。除了马斯克这样的乐观主义者外,大多数专家认为,我们距离看到可以超越人类的AI还有几十年的时间。
当下,实现通用人工智能最根本的障碍是,人类首选需要了解所谓的“智能”是如何运作的,然而这是一个巨大的难题,亟待脑科学方面的突破。
但人类在狭义人工智能领域已经取得了相当大的进展。在现代世界中,狭义人工智能(或弱人工智能)被用于许多方面,这些系统可以在严格的参数内执行离散的任务,例如:
图像识别(Image recognition):最典型的是公安机关的“天网”系统;
自然语言处理(Natural language processing):苹果的Siri、阿里巴巴的“天猫精灵”和百度的“小度”等AI助手的语音识别;
信息检索(Information retrieval);各大搜索引擎;
利用逻辑或证据进行推理(Reasoning using logic or evidence):金融机构用于抵押贷款核销或确定欺诈的可能性。
不难发现,这些任务可以归纳为三类智能:感知、推理和沟通,而且大多数AI程序与大众想象中的“机器人控制”并无关系。
以苹果的Siri语音助手为例,首先,它使用语音识别算法来捕捉人们的问话(“感知”),然后使用自然语言处理来理解这串词的含义并确定一个答案(“推理”),最后使用自然语言生成这个答案并将其转达给用户(“沟通”)。
人工智能的历史演进
那么人工智能系统是如何走到这一步的呢?
自从20世纪40年代艾伦·图灵(Alan Turing)和他同时代的科学家开发出第一台复杂的计算机以来,思维机器的概念就已经存在了。
艾伦·图灵
1956年的达特茅斯学院大会通常被认为是AI发展的里程碑时刻,当时计算机科学家们聚集在一起,在“人工智能之父”马文·明斯基(Marvin Minsky)的推动下,将人工智能作为一个独立的领域进行研究。
马文·明斯基
然而,尽管早期该领域获得了科学家的广泛热情和各界大量资金支持,但人工智能的最初进展依然步履蹒跚,慢的令人失望。
DARPA(美国国防部高级研究计划局)曾在20世纪60年代向高校体系投入了数百万美元,希望机器翻译能够增强其反间谍能力,但由于机器翻译领域缺乏进展,他们的态度也变得消极。
与此同时,在英国,1973年由詹姆斯·莱特希尔(James Lighthill)领导的一个人工智能政府委员会提出了严重的质疑,认为人工智能研究领域只会以渐进的速度发展。
其结果是,美英两国乃至整个西方世界的政府资助被大幅削减。
整个20世纪,人工智能在政策制定者和公众意识中的地位一直是起起伏伏。往往是一个新的发展会引发一波热情和资金的激增,但由于承诺的创新未能实现,人们的兴趣又急剧下降,进而导致失去资源支持。
为什么人工智能在20世纪进展如此缓慢?究其原因与研究人员在开发软件时采用的方法有关。
20世纪的大多数人工智能应用都采取了专家系统的形式,这些系统基于一系列精心开发的“if-then”规则,可以指导基本的决策。

虽然专家系统对于处理一个包含的任务很有用(比如在 ATM 机中取钱),但它们却很难处理那些不容易被编入规则的请求。
例如,很难编写规则来确定一个类似人类的物体是人体模型还是真人,或者核磁共振扫描(MRI)上的深色图案是肿瘤还是良性组织。这些任务往往依赖于那些难以表述的“隐性知识”。
只有当新的人工智能方法投入使用时,才取得了重大突破,而机器学习(Machine Learning)就是这类“新方法”中最具代表性的一个。
机器学习不需要从头开始编写规则,而是通过使用现有的数据(例如,图像被标记为人体模型或真人,MRI扫描被标记为恶性或良性肿瘤)来“训练”算法。
反过来,这些算法每检测出一种模式,就会创建一个通用规则来理解未来的输入,以此形成良性循环。目前,机器学习算法已被应用于多个领域,从发现银行欺诈交易到帮助人力资源团队在招聘员工时筛选简历申请,任务多样。
过去的十多年里,机器学习在一直在人工智能领域独领风骚。但在最近的几年,人们的注意力已经转向了机器学习的一个子领域——深度学习(Deep Learning)。
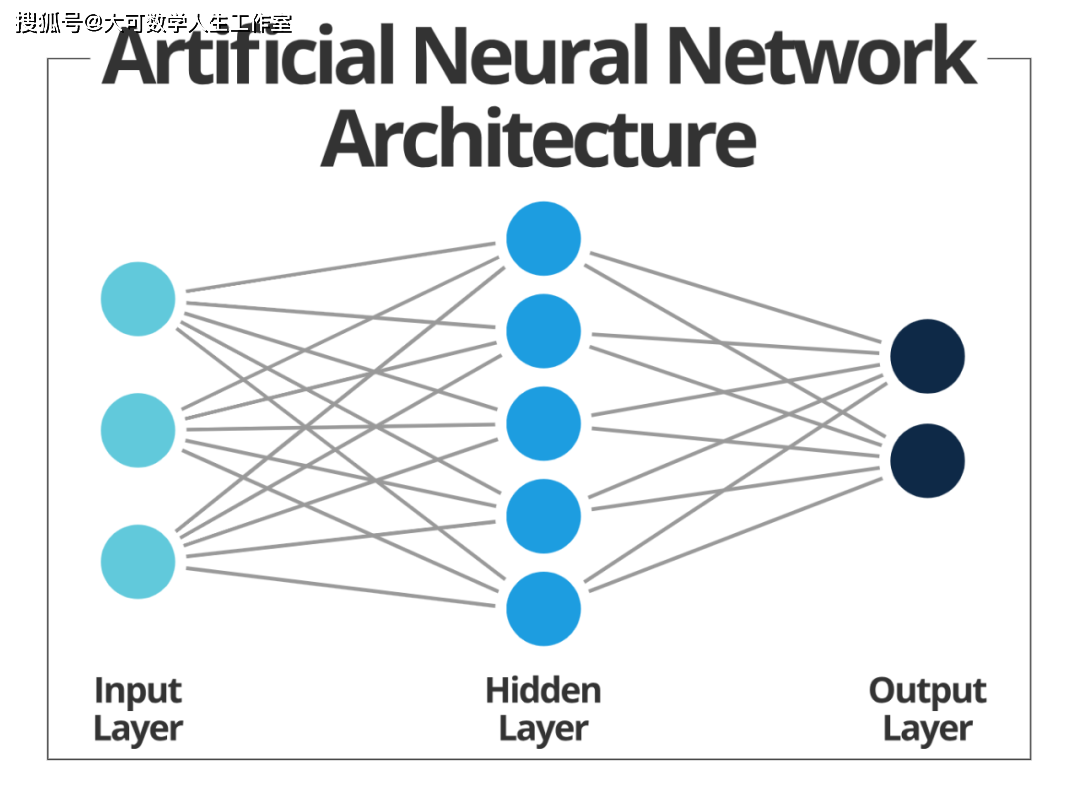
深度学习系统是由“人工神经网络”(Artificial Neural Networks)组成的,它有多层,每一层都被赋予了对图像、声音或文本中不同模式进行理解的任务。
第一层可以识别原始模式,例如图像中物体的轮廓,而第二层可以用来识别该图像中的颜色带。数据通过多层输入,直到系统能够将模式聚类为不同的类别,例如物体或文字。根据伦敦国王学院的一项研究,当使用核磁共振扫描的原始数据时,深度学习技术将大脑年龄评估的准确性提高了一倍以上。
而除了以上方法外,其他重要的人工智能方法还包括监督式学习、强化学习和迁移学习:
监督学习(Supervised learning):算法一开始就可以通过监督或者非监督式学习两种方式进行训练。
监督式学习意味着算法被赋予标记数据,它们从这些数据中提取模式,得出一个通用的规则来理解未来的数据。大多数机器学习和深度学习算法都是使用监督过程来训练的。非监督式学习是指给算法提供未标记的数据,并自行发现模式。例子包括营销公司使用的人群细分,以及一些网络安全软件。
强化学习(Reinforcement learning):有些算法只编写或训练一次,而强化学习则是利用正反馈机制,在使用过程中不断调整和改进算法。
短视频和网购中的推荐系统就是强化学习的一个例子。每当消费者购买一件产品(一本书、一条记录或一件衣服)时,算法都会自动调整,以便在未来推荐时将这些行为考虑进去。
迁移学习(Transfer learning):迁移学习是指将一个在某一领域开发的算法进行修改,以用于另一个领域,而不必从头开始,也不必将大量原始数据和标签数据作为来源。
要说明的是,上述人工智能的方法并不一定是相互排斥的,往往可以结合使用。
机器人的世界
说罢人工智能,再来谈谈机器人(Robotics)。机器人学包括设计、制造和编程能够与物理世界互动的物理机器人。机器人技术中只有一小部分涉及人工智能。
通常,构成机器人有三个重要因素:
机器人通过传感器和执行器与物理世界进行互动;
机器人是可以编程的;
机器人通常是自主或半自主的。
因此,虽然拖拉机、建筑挖掘机和缝纫机有运动部件,可以完成人工任务,但它们需要人类长期(如果不是连续)监督,所以不属于机器人。
相比之下,仓库里的拣货和包装机器,以及升降和搬运病人的“护理机器人”,都是在部分自主的情况下完成任务的,因此它们会被归为机器人。
“机器人”一词最早出现在1921年卡雷尔·卡佩克(Karel Capek)创作的一部科幻剧中,该剧讲述了在一个社会中,克隆人被当做奴隶,结果机器人推翻了主人的故事。
直到20世纪50年代,机器人仍是科幻小说的专利,彼时全世界第一家工业机器人公司Unimation刚刚成立。它发明了一种突破性的近2吨重的机械臂,可以根据预先编程的指令取放物品,是工厂里搬运重物的理想选择。
1961年,Unimate机器人在通用汽车公司首次亮相,它被用来运送热的压铸金属件,并将其焊接到汽车车身部件上。

不久后的1969年,机器人先驱维克多·舍恩曼(Victor Scheinman )开发了斯坦福臂(Stanford Arm),这是世界上第一个电动关节型机器人臂。它被看作是机器人技术的一个突破,因为它在6轴上操作,比以前的单轴或双轴机器有更大的运动自由度。
斯坦福臂标志着关节型机器人革命的开始,它改变了制造业的装配线,并推动了包括库卡(Kuka)和ABB机器人在内的多家商业机器人公司的发展。
多年来,关节型机器人已经承担了从焊接钢材到组装汽车,再到给白色家电加漆等各种各样的功能。国际机器人联合会(International Federation of Robotics)估计目前全球工业机器人的数量为270万台。
走出藩篱的机器人
在20世纪的大部分时间里,机器人行业仍然集中关注关节型机械臂。然而,正如人工智能领域一样,在千禧年之交,情况开始发生变化。
本田公司的ASIMO机器人于2000年亮相,是首批能够用两条腿行走、识别手势和回答问题的人形机器之一。
三年后,KIVA系统公司(现在的亚马逊机器人公司)成立,提供移动机器人,可以在复杂的配送仓库内穿梭运送货物和托盘。
2000年代初,也是自动驾驶汽车从实验室测试走向道路试验的时期。特别具有象征意义的是2004年DARPA的挑战赛,这是同类奖项中的第一个。任何人只要能够让自动驾驶汽车跑完230公里的赛道,就可以获得100万美元的奖金。
虽然这些机器人的功能、大小和环境各不相同,但它们都有一个共同的特点:可移动性。20世纪的关节型机器人往往只能固定在一个地方,但21世纪的机器人已经动了起来。
其中一个驱动因素是人工智能和机器人技术的共生,复杂的软件让物理机器有能力处理无法预料的环境和事件。例如,强化学习意味着机器人现在可以模仿和学习人类。此外,将数据存储在云端意味着机器人可以与网络中的其他机器人学习和共享经验。
另一方面,机器人技术的进步也得益于硬件的创新。传感器的改进使机器人具备了在非结构化环境中导航所需的视觉感知能力。与这些传感器能力相匹配的是丰富且不断增长的物理世界数据库,包括新的3D图像数据集,如谷歌或百度的3D街景地图。
最后,材料科学也在飞速发展。硅胶和蜘蛛丝等更好的材料使机器人外观看起来更锐利,而由压电晶体管制成的“机械毛发”则像人的皮肤一样敏感。此外,液压泵也有改进,不仅摩擦力极小,而且可以实现卓越的控制水平。
综合以上的因素,结果是机器人不再局限于工厂,而是可以在医院病房、商店楼层和城市街道等各种环境中漫游。
更可喜的是,即使在工厂里,机器人也在不断进化。最新的机器被称为“协作机器人”(co-bots),其设计目的是与人类工人协同工作,例如从料箱中拣出零件,从生产线上取出不良品,并完成简单的工作,如拧螺丝、涂胶和焊接。
另外,它们也非常容易重新编程,因此对小批量生产的企业很有吸引力,并且它们还具有扭矩传感器,可以在人类接触的情况下保持不动。麻省理工学院与宝马公司合作进行的研究发现,机器人与人类协作比人类单独工作的工作效率高85%。
纵观机器人技术的发展,可以看出现在的物理机器人主要有五种类型:
关节型机器人(Mobile robots):固定式机器人,其手臂至少有三个旋转关节,这种机器人通常出现在工业环境中。协作机器人是关节型机器人的最新迭代。
移动机器人(Mobile robots):轮式或履带式机器人,可以将货物和人员从一个目的地运送到另一个目的地。自动驾驶汽车是移动机器人能力的巅峰。
人形机器人(Humanoid robots):与人类生理上相似并试图模仿人类能力的机器人。软银声称其Pepper机器人是第一个能够识别人类情绪并相应调整其行为的机器人。
假肢机器人(Prosthetic robots):可以穿戴或操作的机器人,让人们获得更大的力量,包括残疾人或从事危险工作的工人。大众更熟悉的名词是“外骨骼”。
蛇形机器人(Serpentine robots):由多个部分和关节组成的蛇形机器人,可以极其灵活地移动。由于蛇形机器人能够穿越困难的地形和在狭窄的空间中移动,因此在工业检测和搜救任务中得到了应用。
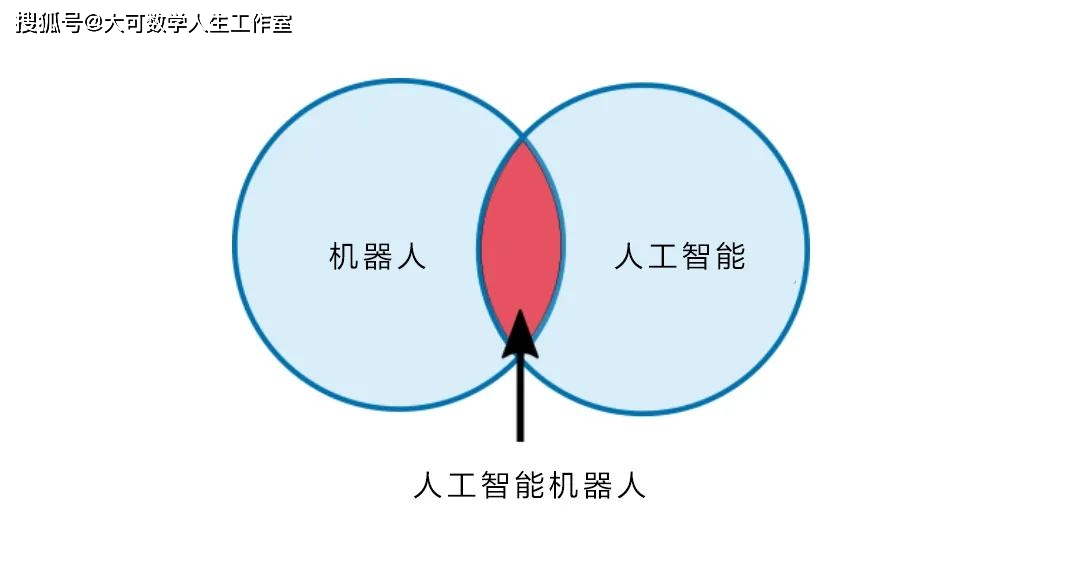
人工智能机器人:机器人和AI的桥梁
从以上的描述可以了解,大多数机器人都不是“智能”的。即使AI被用于控制机器人,AI算法也只是更大的机器人系统的一部分,该系统还包括传感器、执行器和非AI程序。
直到现在,所有的工业机器人都只能通过编程来进行一系列重复性的动作,这些动作显然并不需要人工智能。然而,非智能机器人的功能相当有限。
当你想让机器人执行更复杂的任务时,人工智能算法是必要的。
例如,仓储机器人可能会使用路径搜索算法在仓库周围导航;无人机可能会在电池快用完的时候使用自主导航返回家中;自动驾驶汽车可能会结合使用人工智能算法来检测和避免道路上的潜在危险。这些都是人工智能机器人的例子。
未来会怎样?
如果要问我人工智能和机器人技术这两项技术在未来几年和几十年将如何发展,恐怕很难给出好的答案。深度学习算法可能会走入死胡同,而仿人机器人也可能只是一种幻想。
有观察家已经提出,全球范围内的人工智能泡沫正在膨胀,而机器人的“人工”程度超过了“智能”程度。
但我们可以比较肯定地说,只要算力、数据采集和存储、通用基础设施以及研究投资没有停下来,那么这些技术将继续以这样或那样的方式继续发展。继那之后,我们更应该警惕的是AI、机器人以及二者结合后所产生的社会性影响。
参考资料:
[1]https://medium.com/@thersa/what-is-the-difference-between-ai-robotics-d93715b4ba7f
























