本文转自雷锋网,如需转载请至雷锋网官网申请授权。
本月的 Science 子刊 Science Robotics(《科学-机器人》)封面,被一群大眼萌机器鱼霸占。
这是来自哈佛大学约翰·保尔森工程和应用科学学院、韦斯生物启发工程研究所的一组科学家的最新研究成果。
机器鱼可以像真正的鱼群那样,在没有任何外部控制的情况下同步运动。
水下仿生机器人的群体智能
2021 年 1 月 13 日,相关成果正式发表于 Science Robotics,论文题为 Implicit coordination for 3D underwater collective behaviors in a fish-inspired robot swarm(受鱼群启发的机器人水下三维集体行为的隐式协调)。

从论文标题就可看出,哈佛科学家们的这项成果主要受到了鱼群的启发。
自然界中,鱼群倾向于表现出复杂的、同步的行为,这有助于它们觅食、迁徙、躲避捕食者。它们内部的神奇之处在于,不需要某条“领头鱼”来协调动作,鱼群间也不存在交流——它们的集体行为来自于一种所谓的「隐式协调」(implicit coordination)机制,在这种机制下,鱼会根据周边小伙伴的行为做出决定。
据哈佛大学官方介绍:
这种分散的、自主的组织协调,长期以来一直吸引着科学家们,特别是机器人领域的专家。
其实,在水下仿生机器人方面,我国科研人员也在做类似研究,比如北京大学工学院谢广明教授。在他看来,研究仿生机器人既要注重单体的研发,也要注重群体技术的研发。
在 2018 CCF-GAIR 全球人工智能与机器人峰会期间,谢广明教授曾表示:
鱼群的自主协调并不是因为好玩或是娱乐,唯一的目的是在恶劣、有限的资源环境下生存下去。很多计算机专业的可能都知道粒子群优化算法,而在生物界,通过群体的方式让整个种群延续下去这种行为是一个很值得研究的问题,即群体智能,群体智能也是人工智能很重要的研究分支。
研究人员用动画描述了群体智能,形成平面模型,再将其进一步扩展到三维模型。基于此,机器鱼也可以拥有类似的群体特性——当时谢广明教授的团队已经实现了用三条鱼的自主协调效果。
3D 视觉感知
回到哈佛的研究,他们将研制出的水下机器人称为 Bluebot,它们形成的群体则为 Blueswarm(7 只 Bluebot)。
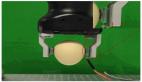
据了解,Bluebot 结合了自主 3D 多鳍运动和 3D 视觉感知,具体的设计为:
-
2 个摄像机,覆盖近全向视场角(FOV)。
-
4 个鳍片,由定制的电磁驱动器提供动力:一条尾鳍和两条胸鳍几乎可以独立地向前和转动,背鳍影响着对垂直潜水深度的控制。
-
3 个 LED 灯,用于相互识别。
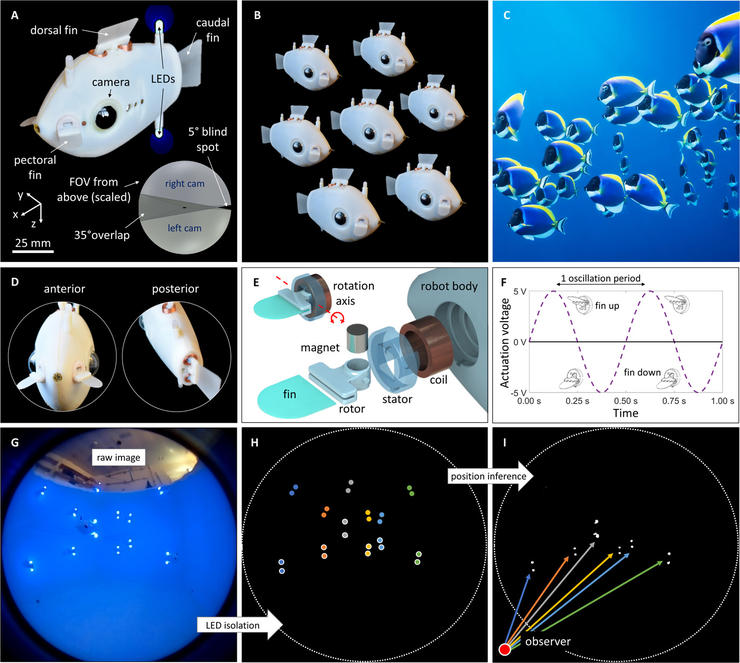
如上图最下面一行所示,研究人员通过对摄像机的设置,使得相邻 Bluebot 的两个后置 LED 及其潜在的表面反射出现在图像中,并对图像进行快速处理。不同 Bluebot 的两个 LED 使用了不同的颜色进行编码,且有着白色轮廓;如果是同色无轮廓标记的情况,则意味着两个 Bluebot 在各自反射。
通过这一套水下视觉协调系统,Bluebot 可通过相机检测到距离最远为 5 米的相邻 Bluebot 的 LED 信号,再通过自定义算法提取其相对位置、距离等信息,实现局部决策(local decision-making),促进自组织行为,如视觉同步、分散/聚集、动态形成圆圈和集体搜索等。
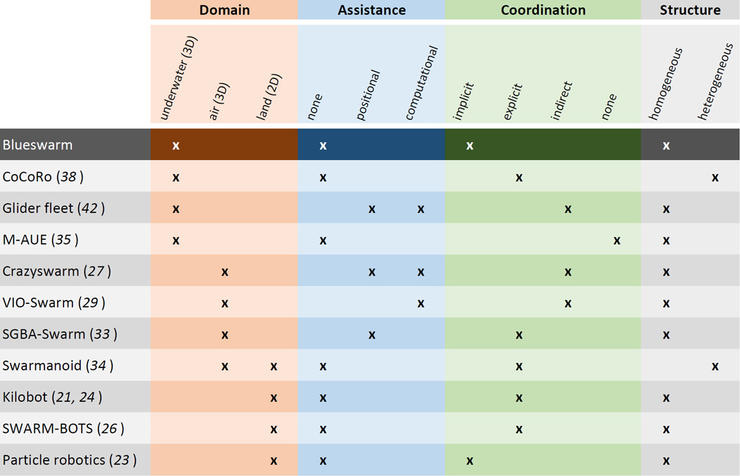
论文中,哈佛团队将 Blueswarm 与多个研究团队的群体机器人群体进行了比较,主要的 4 个评判标准是:
-
应用场景(水、陆、空)
-
干预(无干预、位置、计算)
-
协调(隐式、显式、间接、无协调)
-
结构(同类、异类)
结果表明,Blueswarm 不依赖于任何帮助,且比大多数群体机器人更自主,推动了分散、自组织的群体机器人研究从二维空间到三维空间的突破。
基于上述表现,哈佛大学对这一成果的描述是:
首次在水下机器人中演示具有隐式协调的复杂三维集体行为。(It is the first time researchers have demonstrated complex 3D collective behaviors with implicit coordination in underwater robots. )
论文一作、博士生 Florian Berlinger 也表示:
鉴于机器人常被部署在人类无法进入的或危险的地区,人类干预是不现实的。这种情况下,拥有自给自足的、高度自主的群体机器人,真的会让我们受益。通过隐式协调和 3D 视觉感知,我们创建的系统解决了在水下无法使用 GPS 和 WiFi 等设备的难题。
研究团队认为,这项研究将帮助科学家们继续探索微型水下群体机器人的开发,主要用于执行水下环境(如珊瑚礁)监测和搜索。
未来水下机器人还将如何发展,我们拭目以待。