对于大多数机器人粉来说,提到四足机器人,相信许多人首先想到的首先是波士顿动力的机器人狗。
波士顿动力创立于1992年,是全世界腿足机器人的先驱者。在四足机器人领域,瑞士公司ANYbotics是波士顿动力的有力竞争对手,ANYbotics的ANYmal一直是完全不输波士顿动力SpotMini机器狗的存在。
ANYbotics由一群苏黎世联邦理工学院的工程师于2016年成立。它是苏黎世联邦理工学院机器人系统实验室(RSL)的衍生公司,因推出机器人ANYmal而闻名。
ANYmal此前已经推出能行走的无轮版本四足机器人,它靠四条机械腿行走,能穿越不平坦的地形,也能爬楼梯。最近研究团队就为机器人添加了一组实用的轮子。

据悉,苏黎世联邦理工学院的研究团队自2018年以来一直在与ANYbotics公司实验轮式机器人,在新的原型中,研究人员为机器人的每只脚装上四个装有轮毂电机的轮子。
这种轮足复合式移动机器人结合了轮式机器人在平坦路面上的高效率,和足式机器人在崎岖路面上的越野能力。

穿着轮滑鞋的人和轮子驱动的机器人之间有一个关键的区别,如果设计得当,机器人可以对轮子施加控制,其细微的差别是人类永远无法比拟的。我们已经在波士顿动力公司的两轮人形机器人Handle上看到了这一点,尽管到目前为止,Handle似乎还没有充分利用它的这双有腿的潜力。
“轮子机器人”可像溜冰一样滑动
此前波士顿动力为开发市场,给Handle轮式机器人已经定下方向。而对于轮式机器狗的探索任务,则落在ANYmal等创业团队身上。
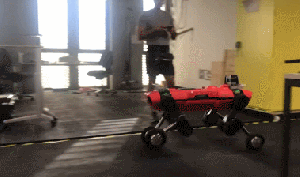
苏黎世联邦理工学院ANYmal的研发团队很早就给他们的机器狗装了四个轮子。当时只公布了这四只脚底的轮子能够像溜冰一样滑动,还会在震动环境下匍匐前进。
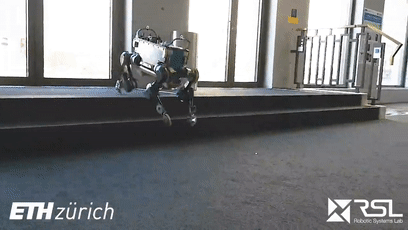
此外,ANYmal能在保持身体重心的情况下,过“单边桥”。
最近,该团队就这款机器人发布了更多视频,证明轮足版ANYmal的已经更加成熟和稳定。不过,装有固定轮子的ANYmal并没有丧失作为腿足机器人的步行能力,它依然能在“穿着轮滑鞋”的前提下步行完成一些移动、调整方向等任务。
据相关研究人员介绍,带轮子的ANYmal与其他轮足式机器人相比,能实现更强大的动态运动,运输成本上还可降低83%,与其腿式机器人相比有明显的优越性。
在2019年的DARPA机器人地下挑战赛中,ANYmal脚踩“风火轮”,跨越障碍的能力非常强。这意味着,它跨越障碍的能力比轮式机器人强,同时又比腿式机器人走得快,当时,研究人员表示它是全球首个应用在实际任务中的轮式-腿式混合驱动机器人。

在最近公布的视频中,ANYmal轮足机器人四个腿部和四个轮子与它进行的每个动作已经无缝地融合在一起,研究人员还设计了能在车轮模式和行走模式之间切换的算法,ANYmal的速度和稳定性也得以提高。
轮子和腿加在一起会产生什么作用?
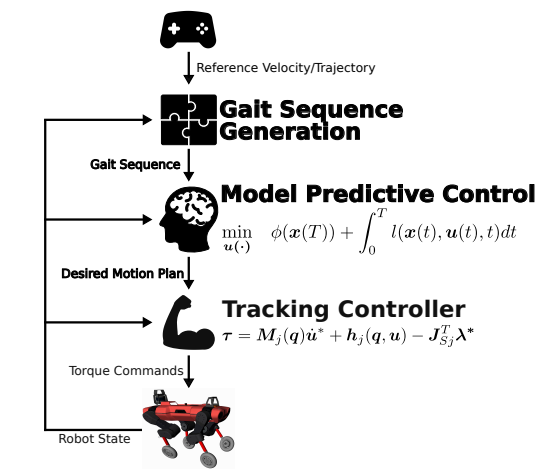
要了解为什么轮子和腿加在一起会对机器人的移动性产生如此大的改变,我们可以看看是如何运作的。
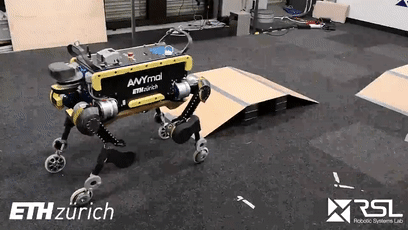
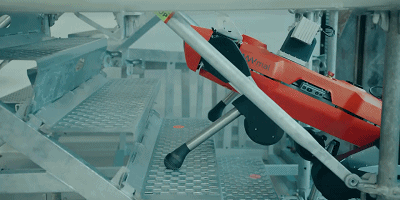
图|ANYmal轮足机器人展示最佳混合步态
这种轮足机器人不仅能够成功克服斜坡、楼梯等轮式机器人的障碍,而且在速度上也超过了四足机器人。
ANYbotics公司的四足机器人ANYmalC能够在动态人类环境中高度自主地执行任务。还具有同步定位和地图绘制(SLAM)功能,并且可以部分避免意外的障碍,这是因为其立体光学摄像头可提供360度视野的深度信息,激光雷达系统可提供额外的环境数据,并给机器人在100米范围内导航。
而这次的轮足版ANYmal是一个“盲眼”机器人,不需要任何摄像头或激光雷达,就可以动态选择最佳的混合步态,将轮子滚动和腿的踏步的融合,只是根据对车轮下的地形的感觉,它可以根据每条腿的轮子运动的效用,在滚动和步态之间无缝转换。
如果一个轮子效率不高,车载传感器和运动计划微控制器可以选择性地控制每个车轮的扭矩,将这条腿切换到踏步运动,同时保持与其他腿的协调。总的来说,这使得ANYmal的这种轮足机器人移动速度更快,而不会降低其应对复杂地形的能力,并且降低了运输成本,因为滚动比步行的效率高得多。该机器人可以在达到4米/秒的速度下实现高度动态的运动,作为对比,已经开始对外销售的四足无轮机器人ANYmalC,移动速度为1米/秒。
图|ANYmalC
ANYmal机器人还能够根据特定的情况切换腿部/轮子的运动方式:它可以根据轮子上的电力“安培”或是否有障碍物来切换到腿部运动。这款机器人也是非常小巧,保持了与其他四足机器人相似的外观。

图|早期原型,会滑冰的ANYma
苏黎世联邦理工学院的MarkoBjelonic是负责这次研究的科研人员之一,他表示他们可以做到通过程序自动找到周期性步态序列,而不需要预先定义步态时序。根据机器人当前的情况,每条腿都能自行推理出何时是抬离地面的好时机,这种方法在崎岖不平的地形中效果相当好。
关于未来是否会为这种轮足机器人装饰传感器来识别地形,Marko表示这次提交的论文只是基于机器人本体感觉信号,即没有使用地形感知来根据环境进行步态转换。他们很惊讶这个框架在平坦和不平坦的地形上都已经有了很好的效果。但他们目前正在研究一种扩展,即在前期根据地形,让机器人规划步态序列。这种地形响应的扩展能够处理更复杂的障碍物,比如楼梯。

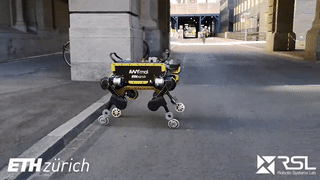
图| 轮足也能行走自如
他表示,目前的轮子不能转向,这是一个好的挑战,因为这样机器人就不得不探索混合滚轮和行走的运动。从应用的角度来看,轮子可以转向,可能是有益的。他们已经分析了腿部配置和每条腿的致动量,可以旋转机器人的髋关节内收/外展,在不增加机器人复杂度的情况下,增加了机器人的机动性。
Marko还认为,有腿部机器人都应该有轮子,轮足机器人在未来会更加普遍。在自然界中没有这种运动方式,使得设计轮足机器人更具挑战性,这可能也是没有出现类似生物的原因之一。目前只有少数腿轮机器人平台,例如,滚轮行走的ANYmal、CENTAURO机器人和波士顿动力公司的Handle,但随着目前这一领域的进步,会有更多类似的概念机器人出现。
关于未来,该团队正在研究一个框架,使机器人能够在地面和具有挑战性的障碍物上进行更复杂的运动。这里的挑战是如何为这样的高维问题找到最佳的机动性,以及如何在真实机器人应用中稳定地执行这些运动。
而关于这项研究的相关论文“Whole-BodyMPCandOnlineGaitSequenceGenerationforWheeled-LeggedRobots”,已经发表在arXiv预印本平台上,论文由苏黎世联邦理工学院的几位作者撰写。

图|最近出现的腿轮机器人平台,如Wheeled-ANYmal、ASCENTO和Handle
当前,人们对机器人的运动要求也越来越复杂。工作环境的复杂性和多样化对移动机器人的机械结构设计提出了越来越高的要求,对于有腿的机器人,疫情蔓延欧美的2020年,似乎是是具有突破性的一年,这从资本方面的动作可以看出,美国机器人研发公司AgilityRobotics最近为其Digit类人机器人筹集了2000万美元的A轮融资,ANYmal公司也在前几天完成了2230万美元的A轮融资。 随着类似机器人刚刚开始进入主流,市场似乎已经准备好持续增长。
在过去,机器人要么倾向于使腿,要么使用轮子移动。而大部分轮腿结合的轮足式机器人仍然只在研究领域。ANYmal这次展示的四足轮式机器人的潜力,是否指明了未来机器人领域的发展方向?这或许需要交给时间。