












0. 前言
一般我们购买一个开发板,厂家都会给出对应的电路图文件,我们可以通过搜索对应名称来查找到对应的外设。对于驱动工程师来说,我们只需要知道外设与SOC交互的一些数据线和信号线即可。
用主控芯片控制这些外设的一般步骤:
- 看电路原理图,弄明白主控芯片和外设是怎么连接的,对于驱动工程师来说,主要是看外设的一些clk、数据引脚、控制引脚是如何连接的;
- 外设一般都会连接到SOC的1个或者多个控制器上,比如i2c、spi、gpio等,有的是数据线有的是信号线,中断线等;
- 根据电路连接和需求对主控芯片进行设置,往往对外设的设置都是通过寄存器操作实现;
- 书写相应代码,实现功能,不同类型的外设,代码结构也不尽相同,比如按键,我们既可以通过轮询方式读取按键信息,也可以通过中断方式来读取。
下面我们就以华清远见的fs4412开发板为例来看如何编写led的裸机程序。SOC exynos 4412 datahseet 下载地址:
https://download.csdn.net/download/daocaokafei/12533438
一、LED灯电路图
首先看下led电路图:
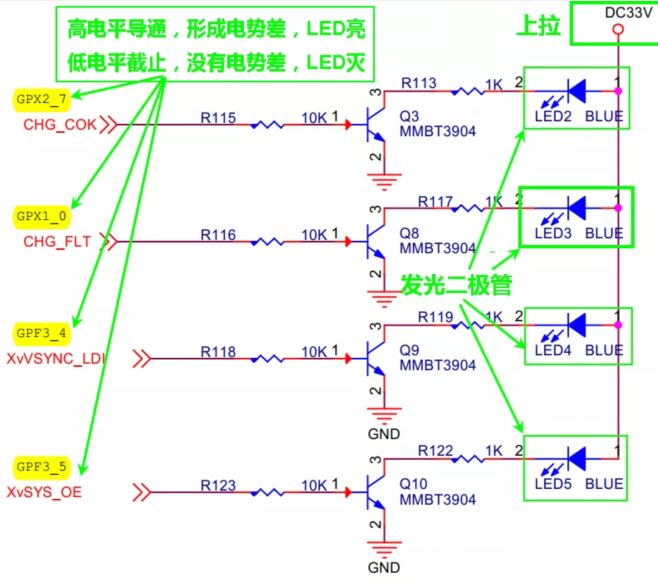
LED电路图
- 该板子有4个LED,是发光二极管,有电流是为蓝色;
- led都接了上拉电阻;
- 三极管的基极接了SOC的某个GPIO引脚;
- 比如GPX1_0,当该引脚为高电平是,三极管pn结导通,于是LED3两侧就有了电势差,LED3被点亮,如果该引脚为低电平,pn结截止,LED3两侧就没有了电势差,LED3熄灭。
下面是CPU核访问GPIO控制器的数据通路:
AHB:高速总线
APB Bridge:APB总线桥
APB:外设总线,低速总线
GPIO挂载在APB总线上
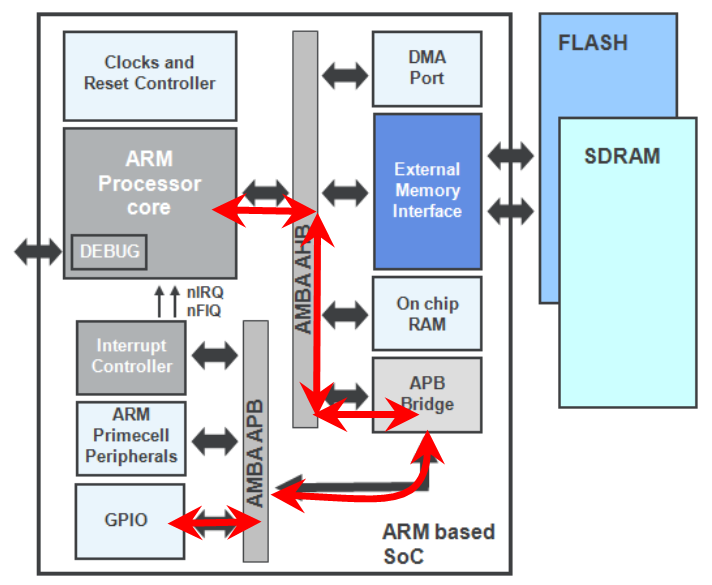
GPIO 与 SOC
由上图可知,cpu要访问GPIO的寄存器需要经过的路径。
二、GPIO
GPIO(General Purpose I/O Ports)意思为通用输入/输出端口,通俗地说,就是一些引脚,可以通过它们输出高低电平或者通过它们读入引脚的状态-是高电平或是低电平。
用户可以通过GPIO口和硬件进行数据交互(如UART),控制硬件工作(如LED、蜂鸣器等),读取硬件的工作状态信号(如中断信号)等。GPIO口的使用非常广泛。
1. GPIO的优点
- 低功耗:GPIO具有更低的功率损耗(大约1µA,µC的工作电流则为100µA)。
- 集成I²C从机接口:GPIO内置I²C从机接口,即使在待机模式下也能够全速工作。
- 小封装:GPIO器件提供最小的封装尺寸—3mm x 3mm QFN!
- 低成本:您不用为没有使用的功能买单!
- 快速上市:不需要编写额外的代码、文档,不需要任何维护工作!
- 灵活的灯光控制:内置多路高分辨率的PWM输出。
- 可预先确定响应时间:缩短或确定外部事件与中断之间的响应时间。
- 更好的灯光效果:匹配的电流输出确保均匀的显示亮度。
- 布线简单:仅需使用2条I²C总线或3条SPI总线。
2. exynos4412 GPIO特性
- 172 个外部中断
- 32个外部可唤醒中断
- 252个多功能 input/output ports
- 在休眠模式下也可以控制GPIO引脚,但不包括 GPX0, GPX1, GPX2, and GPX3
3. 6 General Purpose Input/Output (GPIO) Control
Exynos 4412 SCP 包括304个多功能 input/output端口引脚和164 存储端口引脚. 总共 37 个端口分组和两个存储端口分组.。
下图为GPIO模块图:
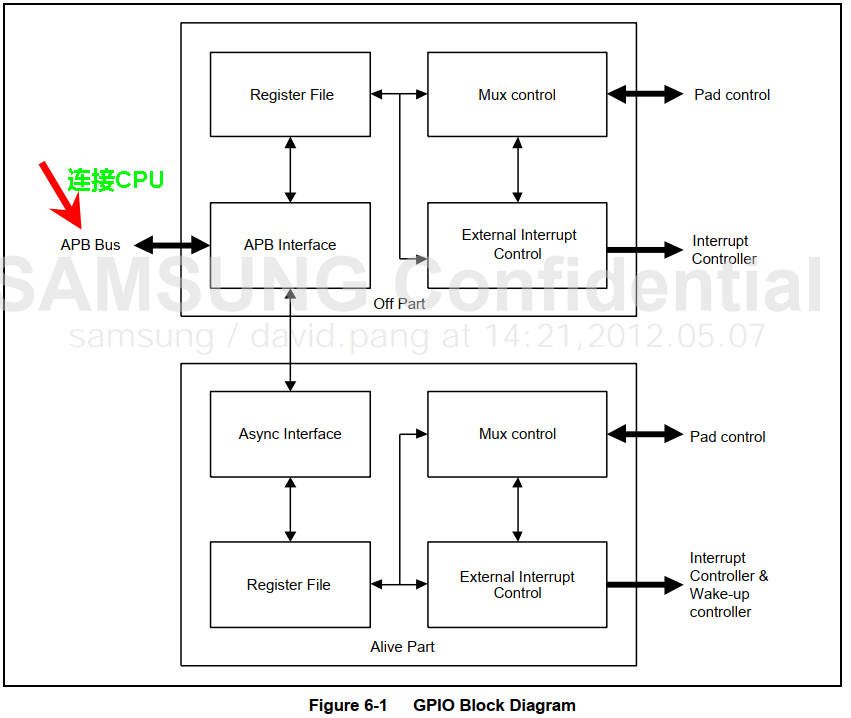
GPIO Block Diagram
三、如何操作GPIO?
主要通过寄存器来操作GPIO引脚。
GPxCON用于选择引脚功能,GPxDAT用于读/写引脚数据;另外,GPxUP用于确定是否使用内部上拉电阻。其中x为A、B…..H、J等。
1. GPxCON寄存器
从寄存器的名字可以看出,它用于配置(Configure)-选择引脚功能。
LED3是连接到GPX1_0,该引脚说明如下:
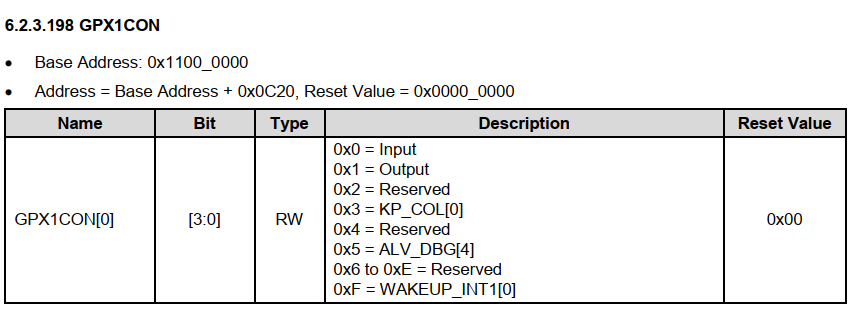
GPX1CON
由上图所示,
GPX1CON地址为0x1100C20;
LED3是输出设备,所以需要将GPX1CON[3:0]设置为0x1,但是能修改其他的bite。
2. GPxDAT寄存器
GPxDAT用于读/写引脚;当引脚被设为输入时,读此寄存器可知相应引脚的电平状态是高还是低;当引脚被设为输出时,写此寄存器相应位可以令此引脚输出高电平或是低电平。
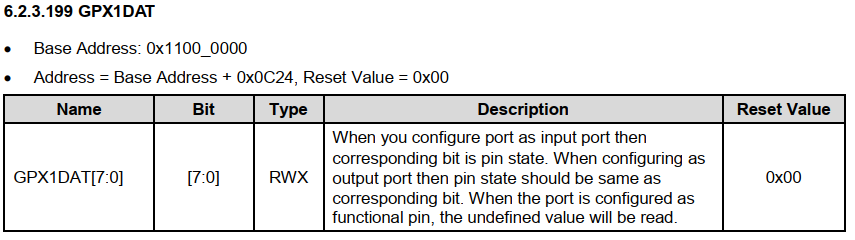
GPX1DAT
- GPX1DAT的地址是0x1100C24
- LED3对应的输出引脚是GPX1DAT[0],点灯只需要将该引脚设置为1即可,灭灯将bite0置0。
3. GPxUP寄存器
GPxUP:某位为1时,相应引脚无内部上拉电阻;为0时,相应引脚使用内部上拉电阻。
上拉电阻的作用在于:当GPIO引脚处于第三态(即不是输出高电平,也不是输出低电平,而是呈高阻态,即相当于没接芯片)时,它的电平状态由上拉电阻、下拉电阻确定。
本例不用设置。
四、驱动编写
下面我们分别用汇编和C语言来给LED编写驱动程序。
1. 汇编代码
大家如果掌握了我之前讲解的汇编指令的知识点,那么这个代码很容易就能看明白:
- .globl _start
- .arm
- _start:
- LDR R0,=0x11000C20 @将配置寄存器GPX1CON的地址写入到R0
- LDR R1,[R0] @读取寄存器GPX1CON的值保存到R1
- BIC R1,R1,#0x0000000f @将R1的3:0位清0,目的是不覆盖到其他bit的值
- ORR R1,R1,#0x00000001 @将R1的3:0位置1
- STR R1,[R0] @将R1的值写回寄存器GPX1CON
- loop:
- LDR R0,=0x11000C24 @将data寄存器GPX1DAT的地址写入到R0
- LDR R1,[R0] @读取寄存器GPX1DAT的值保存到R1
- ORR R1,R1,#0x01 @将R1的值bite0 设置为1,即拉高,点灯
- STR R1,[R0] @将R1的值写回寄存器GPX1DAT
- BL delay @调用延时函数
- LDR R1,[R0]
- BIC R1,R1,#0x01 @将R1的值bite0 设置为0,即拉低,灭灯
- STR R1,[R0]
- BL delay
- B loop
- delay: @delay延时函数
- LDR R2,=0xfffffff
- loop1:
- SUB R2,R2,#0x1
- CMP R2,#0x0
- BNE loop1
- MOV PC,LR @返回
- .end
Makefile
- TARGET=gcd
- all:
- arm-none-linux-gnueabi-gcc -O0 -g -c -o $(TARGET).o $(TARGET).s
- arm-none-linux-gnueabi-ld $(TARGET).o -Ttext 0x40008000 -N -o $(TARGET).elf
- arm-none-linux-gnueabi-objcopy -O binary -S $(TARGET).elf $(TARGET).bin
- clean:
- rm -rf *.o *.elf *.dis *.bin
程序功能很简单,就是让LED3呈现一闪一闪的效果。
执行make,最终生成的gcd.bin文件。
2. c语言实现
如果要进入C语言执行环境,那么就必须为设置栈空间,函数调用参数和返回值会压栈。
start.s
- .text
- .global _start
- _start:
- ldr sp,=0x70000000 /*get stack top pointer*/
- b main
main.c
- /* GPX1 */
- typedef struct {
- unsigned int CON;
- unsigned int DAT;
- unsigned int PUD;
- unsigned int DRV;
- }gpx1;
- #define GPX1 (* (volatile gpx1 *)0x11000C20 )
- void led_init(void)
- {
- GPX1.CON = GPX1.CON & (~(0x0000000f)) | 0x00000001;
- }
- void led_on(int n)
- {
- GPX1.DAT = GPX1.DAT|0x01;
- }
- void led_off()
- {
- GPX1.DAT = GPX1.DAT&(~(0x01));
- }
- void delay_ms(unsigned int num)
- { int i,j;
- for(i=num; i>0;i--)
- for(j=1000;j>0;j--)
- ;
- }
- int main(void)
- {
- led_init ();
- while (1) {
- led_on();
- delay_ms(500);
- led_off();
- delay_ms(500);
- }
- while(1);
- return 0;
- }
map.lds
- OUTPUT_FORMAT("elf32-littlearm", "elf32-littlearm", "elf32-littlearm")
- OUTPUT_ARCH(arm)
- ENTRY(_start)
- SECTIONS
- {
- . = 0x40008000; ;从该地址开始
- . = ALIGN(4);
- .text : ;指定代码段
- {
- gcd.o(.text) ;代码的第一个部分,绝对不能错
- *(.text)
- }
- . = ALIGN(4);
- .rodata : ;只读数据段
- { *(.rodata) }
- . = ALIGN(4);
- .data : ;读写数据段
- { *(.data) }
- . = ALIGN(4);
- .bss :
- { *(.bss) }
- }
Makefile
- TARGET=gcd
- TARGETC=main
- all:
- arm-none-eabi-gcc -O0 -g -c -o $(TARGETC).o $(TARGETC).c
- arm-none-eabi-gcc -O0 -g -c -o $(TARGET).o $(TARGET).s
- arm-none-eabi-gcc -O0 -g -S -o $(TARGETC).s $(TARGETC).c
- arm-none-eabi-ld $(TARGETC).o $(TARGET).o -Tmap.lds -o $(TARGET).elf
- arm-none-eabi-objcopy -O binary -S $(TARGET).elf $(TARGET).bin
- clean:
- rm -rf *.o *.elf *.dis *.bin
执行make命令,最终生成的gcd.bin文件。
这段代码中,读者可能不能理解的是下面的定义:
- typedef struct {
- unsigned int CON;
- unsigned int DAT;
- unsigned int PUD;
- unsigned int DRV;
- }gpx1;
- #define GPX1 (* (volatile gpx1 *)0x11000C20 )
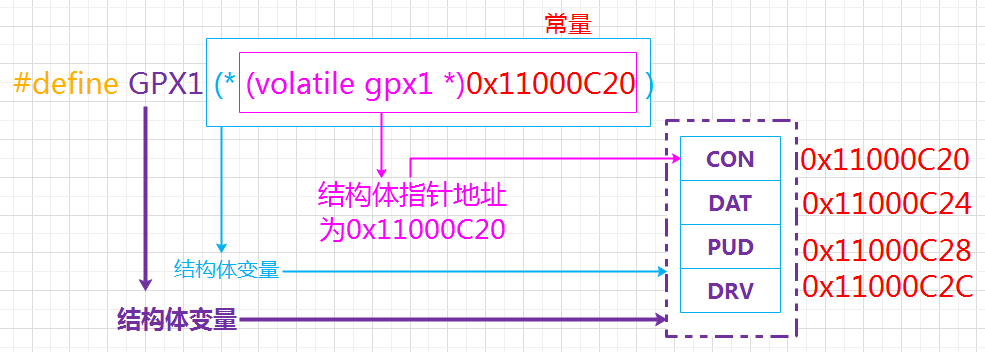
GPX1宏定义
由上图所示:
- (volatile gpx1 *)0x11000C20 ) :将常量0x11000C20 强转成struct gpx1类型指针
- (* (volatile gpx1 *)0x11000C20 ):查找指针对应的内存驱动,即对应整个结构体变量,结构体变量地址为0x11000C20
- #define GPX1 (* (volatile gpx1 *)0x11000C20 ) :GPX1等价于地址为0x11000C20的结构体变量
这样我们要想操作GPX1的寄存器,就可以像结构体变量一样操作即可。
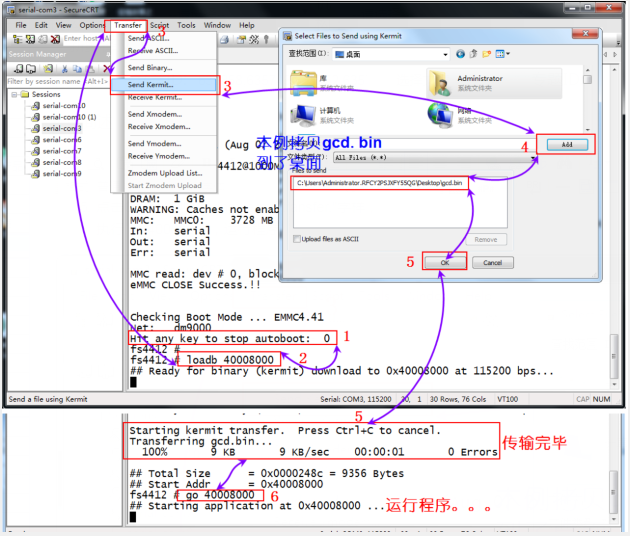
3. 测试
采用UBOOT自带的命令loadb,通过串口以baud速率下载binary(.bin)至SDRAM中某一地址中,然后用go 命令从某地址处开始执行程序。
该命令使用了kermit protocol,嵌入式系统通常使用该协议与pc传送文件。
操作步骤如下:
- 串口连接开发板,开发板启动后在读秒阶段,立即按下回车,进入uboot命令界面
- 执行loadb 40008000 【该地址与Makefile 和map.lds文件中的地址保持一致】
- 选择菜单transfer->send Kermit,
- 然后选择我们编译好的gcd.bin文件,
- 点击OK,出现"Staring kermit transfer."字样,
- 执行 go 40008000,运行程序
执行结果:
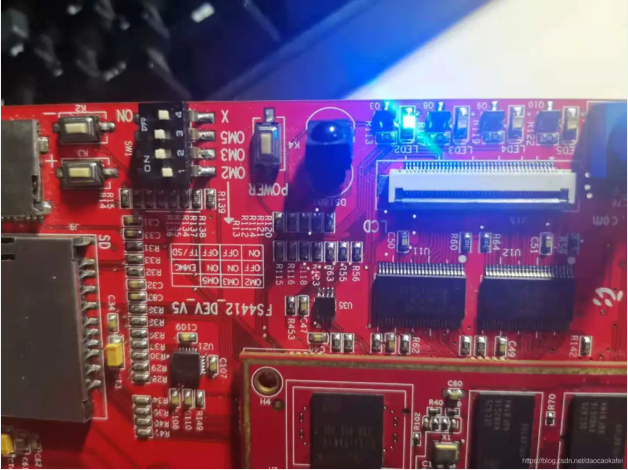
led
可以看到LED闪烁的现象。
5. 注意
该种测试方法需要bootloader选用uboot,并且需要串口工具支持Kermit协议,一口君使用的是SecureCRT7.3.3版本【其他低一些的版本可能不支持该协议】,该软件的下载和安装方法【安装方法有点繁琐】可以公众号后台回复【SecureCRT】。
SecureCRT版本

















