












本文转自雷锋网,如需转载请至雷锋网官网申请授权。
一大早,公园里就热闹了起来,大爷们双手握杆抖动空竹,做出各种花样技巧,引得旁人驻足观看。

这样的场景大多数人应该都不陌生。
早在我国明清时期,抖空竹这项运动就开始兴起、盛行,2006 年 5 月 20 日,空竹更是被国务院批准列入第一批国家级非物质文化遗产名录。
作为一项典型的基础性节律运动,抖空竹可以活动到身体很多部位、预防肩周炎等疾病,还能显著提高新陈代谢,有助于身体健康。
网络上流传着不少抖空竹入门视频,很多人表示抖空竹是个技术活,想轻松自如地抖空竹并没有想象中那么容易,那么问题来了:转眼 2020 年就快结束了,大家都说科技发展得很快,那机器人会抖空竹吗?
您别说,还真会!
脑洞从何而来?
这里有视频截图为证:两条机械臂正在抖空竹。
甚至,人机还能打配合,一起炫技。
其实,这一脑洞来自一家位于日本东京的公司 OMRON SINIC X。
OMRON SINIC X 是总部位于日本京都的知名自动化控制及电子设备制造厂商欧姆龙集团(OMRON Corporation)于 2018 年成立的子公司,其设立的主要目的就在于「近未来设计」——根据其官网介绍,OMRON SINIC X 致力于进行机器人技术、计算机视觉、机器学习和人机交互等领域的前沿研究。
作为欧姆龙集团的一个战略据点,OMRON SINIC X 聘用了多个领域的杰出人才,包括人工智能、机器人、物联网、制造业和金融业等,同时还与高校、科研机构有着密切的合作,旨在重点解决四个领域的社会问题:工厂自动化、医疗、机动、能源管理。
说到这里,就不得不提一下欧姆龙集团在机器人领域的高光时刻——2016 年 9 月 8 日,欧姆龙在官网上宣布,他们开发的能持续与人类进行乒乓球对打的机器人 Forpheus 被吉尼斯世界纪录认定为世界上首台乒乓球教练机器人。
那么这次为何要尝试让机器人抖空竹呢?
研究人员表示,他们的目标在于推进机器人精细控制和人机协作。
对于机器人来说,抖空竹可以说是一个挑战递增、激励不断的学习过程,可惜类似的模型目前还未被设计出来。
如果用真正的机器臂来训练,成本会很高,而且这样的高加速度任务(抖空竹主要是靠惯性)操作起来的确有一定危险性。
基于上述想法,研究人员做出了一个空竹模型(diabolo model),由此,机器人也能抖空竹了。
模型如何构建?
具体过程如何,我们可以在 OMRON SINIC X 发表于预印本平台 arXiv 的一篇论文中找到答案。
论文题为 An analytical diabolo model for robotic learning and control(机器人学习并控制的空竹分析模型)。
首先,研究人员推导出了一个空竹-绳子系统的分析模型。
抖空竹,核心在于绳子,要模拟绳子并不容易,原因在于——其摩擦力取决于许多难以甚至不可能测量出来的参数,而且空竹本身和绳子之间的相互作用也是十分灵活、非线性的。
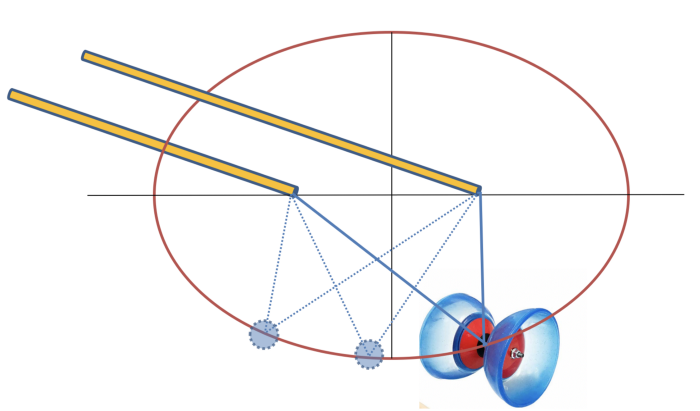
因此,模型简化了抖空竹原本的复杂动作,用一个椭圆来表示绳子的轨迹,用以计算力与运动。
如下图所示,两根小棒的顶端恰好是椭圆的焦点。当然这只是平面图,三维空间中,椭圆形就成了椭球体。
研究人员假设了空竹不同的几种状态,比如:
-
绳子紧绷状态:空竹在椭圆以内运动。
-
绳子松弛状态:空竹的中间部分安全地卡在绳子上。
-
空竹飞行状态:空竹在椭圆以外运动。
为确保模型的准确性,研究人员通过记录人们花式抖空竹的过程,形成了一个数据集,将这一数据集和模型进行对比。结果表明,不论是精度还是物理一致性,模型的表现都超过了基于深度学习的预测器。
接着,研究人员描述了一种基于最优控制的方法「基于模型的预测控制」(Model-based Predictive Control,MPC)。
这一方法以空竹的速度和位置作为输入,通过优化其中一根小棒的运动轨迹,预测两根小棒顶端的运动轨迹,来生成机器人抖空竹的轨迹,让机器人解锁更多花式玩法。
具体到下图:
-
黄色线条代表预测的空竹轨迹;
-
绿色线条代表目标状态;
-
白色线条代表下一次轨迹出现前的预测;
-
红色、蓝色线条代表两根小棒顶端的轨迹;
-
透明红色区域代表实际三维情境中形成的椭球体轨迹。
最后,研究人员在真实的机器人系统上进行测试,实现了人机共抖空竹的结果。
研究人员表示,希望这项研究能对机器人技术起到推动作用,激励机器人学习方面涌现出更多想法。
值得一提的是,OMRON SINIC X 官方表示准备发布仿真模型、数据集和控制算法,作为独立模块和 Gazebo 插件供大家学习,感兴趣的小伙伴们可以保持关注。




















