













机器人在环境中移动的最有效方式之一是车轮在相对平稳的地形上移动。然而,当涉及到克服某些类型的障碍物时,轮子并不是最有效的旅行方式。例如,腿可以帮助机器人攀爬楼梯等障碍物。 德克萨斯A&M大学的科学家与DARPA合作,为军事应用制造机器人,能够在有或没有人类干预的情况下,确定轮子还是腿更适合穿越地形。
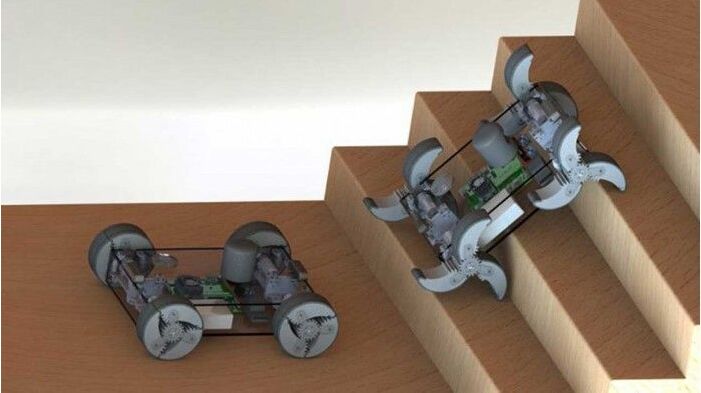
该项目是该大学工程技术和工业分布系的DARPA进攻性群居战术(OFFSET)项目的一部分。下面的机器人概念图作为OFFSET第三次现场实验的一部分进行了展示。副教授Kiju Lee还宣布,她获得了一份新的DARPA合同,用于Offset Sprint-5的工作,重点是增强物理机器人试验台。
该计划的重点是为城市军事行动开发具有敏捷和多功能机车能力的无人地面车辆。Lee和她的团队正在开发一种被称为a-WaLTR的适应性车轮和腿部可转换机器人,能够更有效地横跨不同的服务,包括楼梯。该机器人可根据需要使用轮子或腿移动,并能自行决定使用哪种。
该团队目前正在开发原型机,在暂定于2021年2月举行的OFFSET FX5上展示该硬件平台。该团队还指出,虽然该技术是为军事应用而创造的,但希望未来该技术还能有其他应用。Lee表示,这种适应性强的机器人可以应用于太空、家政服务、监控和农业等领域。
目前还没有迹象表明,该机器人的功能原型已经构建完成。目前还不清楚DARPA授予的机器人制造合同价值多少。















