













谈起迪士尼,你会想到机智勇敢的公主们?

城堡上空绚丽的烟花?

还是......迪士尼出品的机器人???
近日召开的机器人国际顶级会议 2020 IEEE 国际智能机器人与系统大会(IROS 2020)上,有一篇论文发表,介绍的就是上面这款似人非人、似机器确实是机器的机器人。
论文题为 Realistic and Interactive Robot Gaze(逼真、可互动的机器人凝视)——的确,来自这款机器人的凝视可太逼真了!
再近距离观察一下它的眼球。
在迪士尼乐园偶遇机器人
这款机器人的特征应该不难发现,一是没有皮肤,二是会眼神互动。
维基百科上,类人机器人(Humanoid robot)的定义是:机器人的一种,具有类似于人类外型的特征,例如有头部、躯干跟手脚,但不一定有头发、五官、牙齿、皮肤等细微特征。
如此看来,这是一款类人机器人。
它主要的应用领域是娱乐——迪士尼下一步打算将其发展成卡通人物,它将按脚本与游客互动。
对于这款有点诡异的机器人,迪士尼官方的脑洞是:
机器人的角色是一位正在读书的老人,可能是在图书馆里,也可能在公园长椅上。他听力有困难、视力也在下降,但还是经常被路过的人分散注意力。大多数时候他会瞥一眼匆匆走过的人们,也会友好地向熟人点头示意,但当有人侵占私人空间时他会瞪着他们。
也许下一次去迪士尼乐园就能偶遇这位“老人”了,还是希望工作人员能给它穿上人造皮肤。

眼神交流,真实最重要
这款机器人的研究团队阵容可以说是强强联合了:
-
曾设计过不少机器人的迪士尼研究中心;
-
负责设计、建造世界上所有迪士尼乐园及度假村的迪士尼业务部门华特迪士尼幻想工程(WDI);
-
世界顶尖的私立研究型大学加州理工学院;
-
被誉为是“公立常春藤”的伊利诺伊大学厄巴纳-香槟分校。
他们设计的机器人究竟有何亮点,来看看论文是怎么说的。
论文表示,此前「人-机注视互动」的研究主要关注技术层面。而此次,迪士尼团队展示了一个通用架构——要创建「注视互动」,不仅是从技术角度出发,也注重机器人眼球运动的逼真性和可信度。
对此,IEEE 网站的评价是:
可以把它想象成一种老式的、专用于注视的图灵测试——如果无法区分机器人与人类的注视,那么迪士尼的设计就是逼真的。
也就是说,迪士尼不是要让机器人注视远方,而是当人类走近它并望向它的眼睛时,它会有眼神的回应。
包容体系结构的传承
通常,科学家们会通过研究人类的大脑运作机制设计控制系统,但这一次迪士尼团队采用的方法是他们最为擅长的东西——动画。
正因如此,机器人硬件部分其实是一个「音频-动画半身像」。
毕竟,迪士尼只是不希望机器人在注视人类时出错。在这种所谓的“视觉吸引”(visual appeal)方法背后,实际上是多年的、大量的人机交互(HRI)研究积累。
迪士尼希望把「人-机注视互动」打造成真人面对面眼神交流的水平,为此他们的设计是:机器人可以感知环境中的人,根据人们的动作确定他们是否对机器人感兴趣,随后机器人会选择适当方式执行高度逼真的动作。
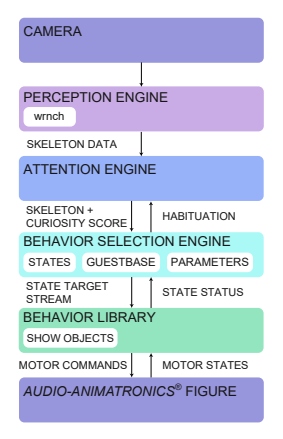
具体来讲,机器人有以下几种状态:
-
读书:机器人的默认状态。
-
扫视:使用 RGB-D 摄像机识别目标,当注意力引擎显示人们的好奇心分数超过某一阈值时,机器人会瞥一眼对方。
-
吸引:当注意力引擎显示刺激达到了某一阈值时,机器人会将头转向对方,目光注视。
-
确认:当机器人判定见到“熟人”时,将直接从吸引状态或扫视状态进入确认状态。
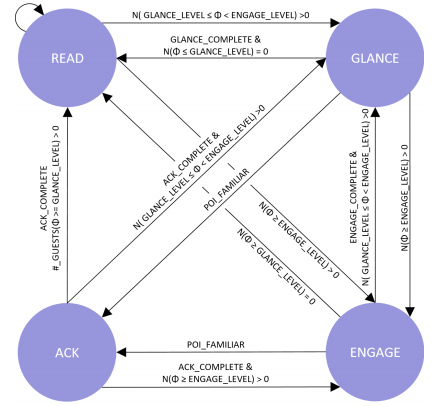
不过,在上述状态以外,还有一些更低级的行为,如呼吸、轻微的头部运动、眨眼和眼球快速运动等。
雷锋网了解到,这几种行为其实涉及到了包容体系结构(subsumption architecture)。
简单来讲,包容体系结构是一种自下而上的组织架构,从简单、分散、低层次的行为到更复杂的行为。
1980 年代,包容体系结构的概念由斯坦福大学博士、美国著名机器人制造专家、前麻省理工学院 CSAIL 负责人 Rodney Brooks 提出。作为「现代机器人之父」,Rodney Brooks 还是著名机器人公司 iRobot 和 Rethinks Robotics 的创办者、Robust.ai 的联合创始人和首席技术官。
雷锋网注意到,10 月 30 日 Rodney Brooks 也在推特上对迪士尼团队的设计发表了自己的看法:
人们低估了一款机器人从学术论文到现实世界所需的时间。迪士尼用了 25 年时间,在类人机器人眼控制方面使用了包容体系结构,比我 1995 年在机器人 Cog 和 Kismet 上的应用更好、更流畅。
下图展示的即为由麻省理工学院创作的机器人 Kismet,它是最早实现与人类社交、情感互动的一款机器人。
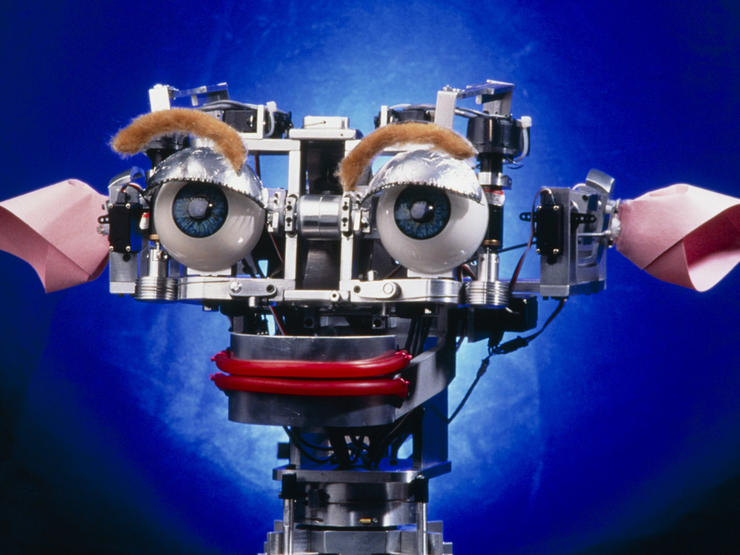
虽然看上去有点傻,但 Kismet 要比迪士尼团队的机器人亲切多了。




















