













")
在本系列的 第一 和 第二 部分中讨论的大多数示例都是以某种方式闪烁的 LED。起初它可能很有趣,但是一段时间后变得有些无聊。让我们做些更有趣的事情……
…让我们点亮更多的 LED!
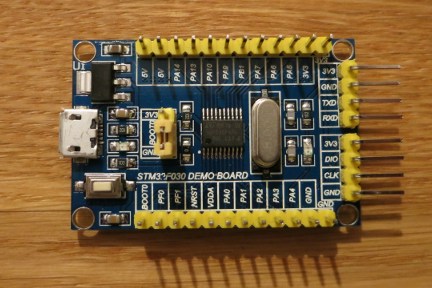
STM32F030F4P6
WS281x LED
WS281x RGB LED(及其克隆品)非常受欢迎。你可以以单个元素购买、链成长条或组装成矩阵、环或其他形状。

WS2812B
它们可以串联连接,基于这个事实,你可以只用 MCU 的单个引脚就可以控制一个很长的 LED 灯条。不幸的是,它们的内部控制器使用的物理协议不能直接适用于你在 MCU 中可以找到的任何外围设备。你必须使用 位脉冲或以特殊方式使用可用的外设。
哪种可用的解决方案最有效取决于同时控制的 LED 灯条数量。如果你必须驱动 4 到 16 个灯条,那么最有效的方法是 使用定时器和 DMA(请不要忽略这篇文章末尾的链接)。
如果只需要控制一个或两个灯条,请使用可用的 SPI 或 UART 外设。对于 SPI,你只能在发送的一个字节中编码两个 WS281x 位。由于巧妙地使用了起始位和停止位,UART 允许更密集的编码:每发送一个字节 3 位。
我在 此站点 上找到了有关 UART 协议如何适用于 WS281x 协议的最佳解释。如果你不懂波兰语,这里是 英文翻译。
基于 WS281x 的 LED 仍然是最受欢迎的,但市场上也有 SPI 控制的 LED:APA102、SK9822。关于它们的三篇有趣的文章在这里:1、2、3。
LED 环
市场上有许多基于 WS2812 的环。我有一个这样的:

WS2812B
它具有 24 个可单独寻址的 RGB LED(WS2812B),并暴露出四个端子:GND、5V、DI 和 DO。通过将 DI(数据输入)端子连接到上一个的 DO(数据输出)端子,可以链接更多的环或其他基于 WS2812 的东西。
让我们将这个环连接到我们的 STM32F030 板上。我们将使用基于 UART 的驱动程序,因此 DI 应连接到 UART 接头连接器上的 TXD 引脚。 WS2812B LED 需要至少 3.5V 的电源。 24 个 LED 会消耗大量电流,因此在编程/调试期间,最好将环上的 GND 和 5V 端子直接连接到 ST-LINK 编程器上可用的 GND 和 5V 引脚:
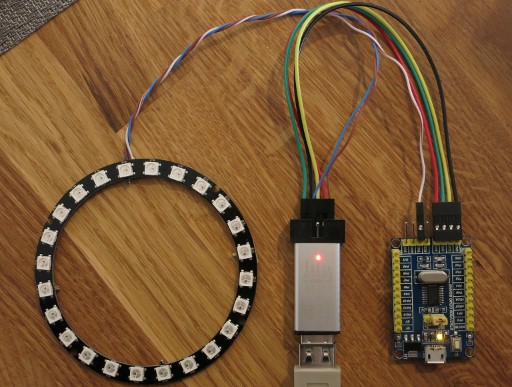
WS2812B
我们的 STM32F030F4P6 MCU 和整个 STM32 F0、F3、F7、L4 系列具有 F1、F4、L1 MCU 不具备的一项重要功能:它可以反转 UART 信号,因此我们可以将环直接连接到 UART TXD 引脚。如果你不知道我们需要这种反转,那么你可能没有读过我上面提到的 文章。
因此,你不能以这种方式使用流行的 Blue Pill 或 STM32F4-DISCOVERY。使用其 SPI 外设或外部反相器。有关使用 SPI 的 NUCLEO-F411RE,请参见 圣诞树灯 项目作为 UART + 逆变器的示例或 WS2812示例。
顺便说一下,大多数 DISCOVERY 板可能还有一个问题:它们在 VDD = 3V 而不是 3.3V 的情况下工作。 对于高 DI,WS281x 至少要求电源电压 * 0.7。如果是 5V 电源,则为 3.5V;如果是 4.7V 电源,则为 3.3V;可在 DISCOVERY 的 5V 引脚上找到。如你所见,即使在我们的情况下,第一个 LED 的工作电压也低于规格 0.2V。对于 DISCOVERY 板,如果供电 4.7V,它将工作在低于规格的 0.3V 下;如果供电 5V,它将工作在低于规格 0.5V 下。
让我们结束这段冗长的介绍并转到代码:
package mainimport ("delay""math/rand""rtos""led""led/ws281x/wsuart""stm32/hal/dma""stm32/hal/gpio""stm32/hal/irq""stm32/hal/system""stm32/hal/system/timer/systick""stm32/hal/usart")var tts *usart.Driverfunc init() {system.SetupPLL(8, 1, 48/8)systick.Setup(2e6)gpio.A.EnableClock(true)tx := gpio.A.Pin(9)tx.Setup(&gpio.Config{Mode: gpio.Alt})tx.SetAltFunc(gpio.USART1_AF1)d := dma.DMA1d.EnableClock(true)tts = usart.NewDriver(usart.USART1, d.Channel(2, 0), nil, nil)tts.Periph().EnableClock(true)tts.Periph().SetBaudRate(3000000000 / 1390)tts.Periph().SetConf2(usart.TxInv)tts.Periph().Enable()tts.EnableTx()rtos.IRQ(irq.USART1).Enable()rtos.IRQ(irq.DMA1_Channel2_3).Enable()}func main() {var rnd rand.XorShift64rnd.Seed(1)rgb := wsuart.GRBstrip := wsuart.Make(24)black := rgb.Pixel(0)for {c := led.Color(rnd.Uint32()).Scale(127)pixel := rgb.Pixel(c)for i := range strip {strip[i] = pixeltts.Write(strip.Bytes())delay.Millisec(40)}for i := range strip {strip[i] = blacktts.Write(strip.Bytes())delay.Millisec(20)}}}func ttsISR() {tts.ISR()}func ttsDMAISR() {tts.TxDMAISR()}//c:__attribute__((section(".ISRs")))var ISRs = [...]func(){irq.USART1: ttsISR,irq.DMA1_Channel2_3: ttsDMAISR,}
导入部分
与前面的示例相比,导入部分中的新内容是 rand/math 包和带有 led/ws281x 子树的 led 包。 led 包本身包含 Color 类型的定义。 led/ws281x/wsuart 定义了 ColorOrder、Pixel 和 Strip 类型。
我想知道如何使用 image/color 中的 Color 或 RGBA 类型,以及如何以它将实现 image.Image 接口的方式定义 Strip。 但是由于使用了 gamma 校正 和 大开销的 color/draw 包,我以简单的方式结束:
type Color uint32type Strip []Pixel
使用一些有用的方法。然而,这种情况在未来可能会改变。
init 函数
init 函数没有太多新颖之处。 UART 波特率从 115200 更改为 3000000000/1390 ≈ 2158273,相当于每个 WS2812 位 1390 纳秒。 CR2 寄存器中的 TxInv 位设置为反转 TXD 信号。
main 函数
XorShift64 伪随机数生成器用于生成随机颜色。 XORSHIFT 是目前由 math/rand 包实现的唯一算法。你必须使用带有非零参数的 Seed 方法显式初始化它。
rgb 变量的类型为 wsuart.ColorOrder,并设置为 WS2812 使用的 GRB 颜色顺序(WS2811 使用 RGB 顺序)。然后用于将颜色转换为像素。
wsuart.Make(24) 创建 24 像素的初始化条带。它等效于:
strip := make(wsuart.Strip, 24)strip.Clear()
其余代码使用随机颜色绘制类似于 “Please Wait…” 微调器的内容。
strip 切片充当帧缓冲区。 tts.Write(strip.Bytes()) 将帧缓冲区的内容发送到环。
中断
该程序由处理中断的代码组成,与先前的 UART 示例 中的代码相同。
让我们编译并运行:
$ egc$ arm-none-eabi-size cortexm0.elftext data bss dec hex filename14088 240 204 14532 38c4 cortexm0.elf$ openocd -d0 -f interface/stlink.cfg -f target/stm32f0x.cfg -c 'init; program cortexm0.elf; reset run; exit'
我跳过了 openocd 的输出。下面的视频显示了该程序的工作原理:
让我们做些有用的事情...
在 第一部分 的开头,我曾问过:“Go 能深入到多低层,而还能做一些有用的事情?”。 我们的 MCU 实际上是一种低端设备(8 比特的人可能会不同意我的看法),但到目前为止,我们还没有做任何有用的事情。
所以... 让我们做些有用的事情... 让我们做个时钟!
在互联网上有许多由 RGB LED 构成的时钟示例。让我们用我们的小板子和 RGB 环制作自己的时钟。我们按照下面的描述更改先前的代码。
导入部分
删除 math/rand 包,然后添加 stm32/hal/exti。
全局变量
添加两个新的全局变量:btn 和 btnev:
var (tts *usart.Driverbtn gpio.Pinbtnev rtos.EventFlag)
它们将用来处理那些用于设置时钟的 “按钮”。我们的板子除了重置之外没有其他按钮,但是如果没有它,我们仍然可以通过某种方式进行管理。
init 函数
将这段代码添加到 init 函数:
btn = gpio.A.Pin(4)btn.Setup(&gpio.Config{Mode: gpio.In, Pull: gpio.PullUp})ei := exti.Lines(btn.Mask())ei.Connect(btn.Port())ei.EnableFallTrig()ei.EnableRiseTrig()ei.EnableIRQ()rtos.IRQ(irq.EXTI4_15).Enable()
在内部上拉电阻启用的情况下,将 PA4 引脚配置为输入。它已连接至板载 LED,但这不会妨碍任何事情。更重要的是它位于 GND 引脚旁边,所以我们可以使用任何金属物体来模拟按钮并设置时钟。作为奖励,我们还有来自板载 LED 的其他反馈。
我们使用 EXTI 外设来跟踪 PA4 状态。它被配置为在发生任何更改时都会产生中断。
btnWait 函数
定义一个新的辅助函数:
func btnWait(state int, deadline int64) bool {for btn.Load() != state {if !btnev.Wait(1, deadline) {return false // timeout}btnev.Reset(0)}delay.Millisec(50) // debouncingreturn true}
它等待 “按钮” 引脚上的指定状态,但只等到最后期限出现。这是稍微改进的轮询代码:
for btn.Load() != state {if rtos.Nanosec() >= deadline {// timeout}}
我们的 btnWait 函数不是忙于等待 state 或 deadline,而是使用 rtos.EventFlag 类型的 btnev 变量休眠,直到有事情发生。你当然可以使用通道而不是 rtos.EventFlag,但是后者便宜得多。
main 函数
我们需要全新的 main 函数:
func main() {rgb := wsuart.GRBstrip := wsuart.Make(24)ds := 4 * 60 / len(strip) // Interval between LEDs (quarter-seconds).adjust := 0adjspeed := dsfor {qs := int(rtos.Nanosec() / 25e7) // Quarter-seconds since reset.qa := qs + adjustqa %= 12 * 3600 * 4 // Quarter-seconds since 0:00 or 12:00.hi := len(strip) * qa / (12 * 3600 * 4)qa %= 3600 * 4 // Quarter-seconds in the current hour.mi := len(strip) * qa / (3600 * 4)qa %= 60 * 4 // Quarter-seconds in the current minute.si := len(strip) * qa / (60 * 4)hc := led.Color(0x550000)mc := led.Color(0x005500)sc := led.Color(0x000055)// Blend the colors if the hands of the clock overlap.if hi == mi {hc |= mcmc = hc}if mi == si {mc |= scsc = mc}if si == hi {sc |= hchc = sc}// Draw the clock and write to the ring.strip.Clear()strip[hi] = rgb.Pixel(hc)strip[mi] = rgb.Pixel(mc)strip[si] = rgb.Pixel(sc)tts.Write(strip.Bytes())// Sleep until the button pressed or the second hand should be moved.if btnWait(0, int64(qs+ds)*25e7) {adjust += adjspeed// Sleep until the button is released or timeout.if !btnWait(1, rtos.Nanosec()+100e6) {if adjspeed < 5*60*4 {adjspeed += 2 * ds}continue}adjspeed = ds}}}
我们使用 rtos.Nanosec 函数代替 time.Now 来获取当前时间。这样可以节省大量的闪存,但也使我们的时钟变成了不知道日、月、年的老式设备,最糟糕的是它无法处理夏令时的变化。
我们的环有 24 个 LED,因此秒针的显示精度可以达到 2.5 秒。为了不牺牲这种精度并获得流畅的运行效果,我们使用 1/4 秒作为基准间隔。半秒就足够了,但四分之一秒更准确,而且与 16 和 48 个 LED 配合使用也很好。
红色、绿色和蓝色分别用于时针、分针和秒针。这允许我们使用简单的“逻辑或操作”进行颜色混合。我们 Color.Blend 方法可以混合任意颜色,但是我们闪存不多,所以我们选择最简单的解决方案。
我们只有在秒针移动时才重画时钟。
btnWait(0, int64(qs+ds)*25e7)
上面的这行代码等待的正是那一刻,或者是按钮的按下。
每按一下按钮就会把时钟向前调一调。按住按钮一段时间会加速调整。
中断
定义新的中断处理程序:
func exti4_15ISR() {pending := exti.Pending() & 0xFFF0pending.ClearPending()if pending&exti.Lines(btn.Mask()) != 0 {btnev.Signal(1)}}
并将 irq.EXTI4_15: exti4_15ISR 条目添加到 ISR 数组。
该处理程序(或中断服务程序)处理 EXTI4_15 IRQ。 Cortex-M0 CPU 支持的 IRQ 明显少于其较大的同类兄弟处理器,因此你经常可以看到一个 IRQ 被多个中断源共享。在我们的例子中,一个 IRQ 由 12 个 EXTI 线共享。
exti4_15ISR 读取所有挂起的位,并从中选择 12 个更高的有效位。接下来,它清除 EXTI 中选中的位并开始处理它们。在我们的例子中,仅检查第 4 位。 btnev.Signal(1) 引发 btnev.Wait(1, deadline) 唤醒并返回 true。
你可以在 Github 上找到完整的代码。让我们来编译它:
$ egc$ arm-none-eabi-size cortexm0.elftext data bss dec hex filename15960 240 216 16416 4020 cortexm0.elf
这里所有的改进只得到 184 个字节。让我们再次重新构建所有内容,但这次在 typeinfo 中不使用任何类型和字段名:
$ cd $HOME/emgo$ ./clean.sh$ cd $HOME/firstemgo$ egc -nf -nt$ arm-none-eabi-size cortexm0.elftext data bss dec hex filename15120 240 216 15576 3cd8 cortexm0.elf
现在,有了千字节的空闲空间,你可以改进一些东西。让我们看看它是如何工作的:
我不知道我是怎么精确打到 3:00 的!?
以上就是所有内容!在第 4 部分(本系列的结束)中,我们将尝试在 LCD 上显示一些内容。(LCTT 译注:然而烂尾了,第三篇写于 2018 年,整个博客当年就停更了。)




















