













这应该是业界第一款完整支持 Transformer、GPT 等多种模型高速推理的开源引擎。
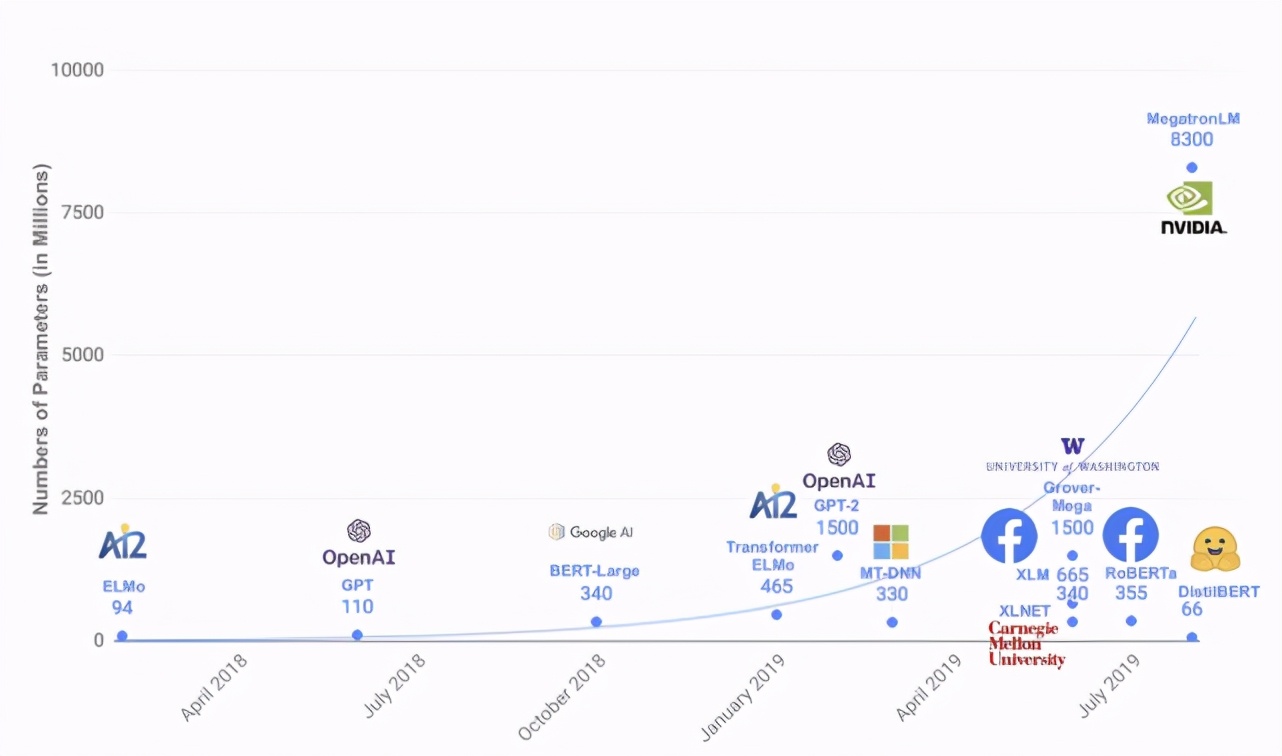
2017 年 Google 提出了 Transformer [1] 模型,之后在它基础上诞生了许多优秀的预训练语言模型和机器翻译模型,如 BERT [2] 、GPT 系列[13]等,不断刷新着众多自然语言处理任务的能力水平。与此同时,这些模型的参数量也在呈现近乎指数增长(如下图所示)。例如最近引发热烈讨论的 GPT-3 [3],拥有 1750 亿参数,再次刷新了参数量的记录。
如此巨大的参数量,也为模型推理部署带来了挑战。以机器翻译为例,目前 WMT[4]比赛中 SOTA 模型已经达到了 50 层以上。主流深度学习框架下,翻译一句话需要好几秒。这带来了两个问题:一是翻译时间太长,影响产品用户体验;二是单卡 QPS (每秒查询率)太低,导致服务成本过高。
因此,今天给大家安利一款速度非常快,同时支持非常多特性的高性能序列推理引擎——LightSeq。它对以 Transformer 为基础的序列特征提取器(Encoder)和自回归的序列解码器(Decoder)做了深度优化,早在 2019 年 12 月就已经开源,应用在了包括火山翻译等众多业务和场景。据了解,这应该是业界第一款完整支持 Transformer、GPT 等多种模型高速推理的开源引擎。
LightSeq 可以应用于机器翻译、自动问答、智能写作、对话回复生成等众多文本生成场景,大大提高线上模型推理速度,改善用户的使用体验,降低企业的运营服务成本。
相比于目前其他开源序列推理引擎,LightSeq具有如下几点优势:
1. 高性能
LightSeq推理速度非常快。例如在翻译任务上,LightSeq相比于Tensorflow实现最多可以达到14倍的加速。同时领先目前其他开源序列推理引擎,例如最多可比Faster Transformer快1.4倍。
2. 支持模型功能多
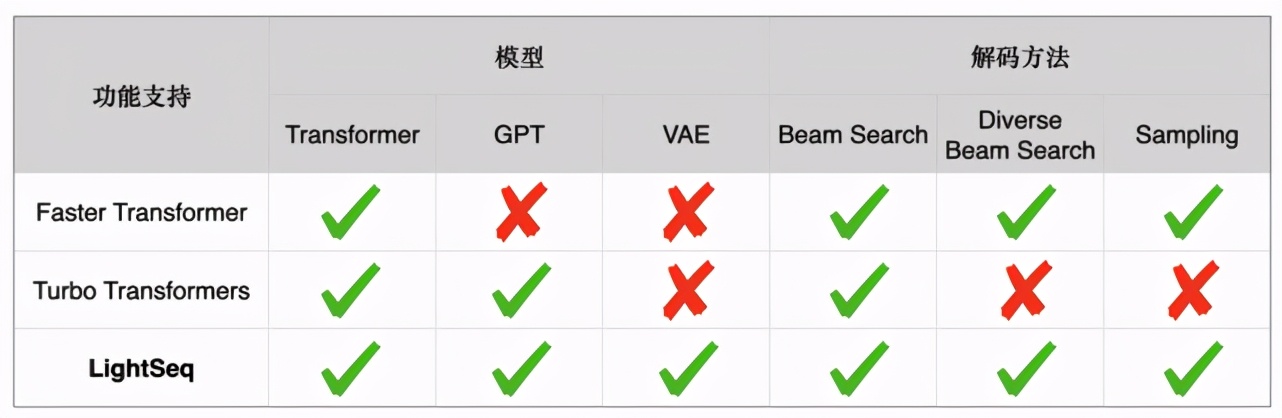
LightSeq支持BERT、GPT、Transformer、VAE 等众多模型,同时支持beam search、diverse beam search[5]、sampling等多种解码方式。下表详细列举了Faster Transformer[7]、Turbo Transformers[6]和LightSeq三种推理引擎在文本生成场景的功能差异:
3. 简单易用,无缝衔接Tensorflow、PyTorch等深度学习框架
LightSeq通过定义模型协议,支持各种深度学习框架训练好的模型灵活导入。同时包含了开箱即用的端到端模型服务,即在不需要写一行代码的情况下部署高速模型推理,同时也灵活支持多层次复用。
使用方法
利用 LightSeq 部署线上服务比较简便。LightSeq 支持了 Triton Inference Server[8],这是 Nvidia 开源的一款 GPU 推理 server ,包含众多实用的服务中间件。LightSeq 支持了该 server 的自定义推理引擎 API 。因此只要将训练好的模型导出到 LightSeq 定义的模型协议[9]中,就可以在不写代码的情况下,一键启动端到端的高效模型服务。更改模型配置(例如层数和 embedding 大小)都可以方便支持。具体过程如下:
首先准备好模型仓库,下面是目录结构示例,其中 transformer.pb 是按模型协议导出的模型权重,libtransformer.so 是 LightSeq 的编译产物。
- - model_zoo/- model_repo/- config.pbtxt- transformer.pb- 1/- libtransformer.so
然后就可以启动Triton Inference Server[8],搭建起模型服务。
- trtserver --model-store=${model_zoo}
性能测试
在 NVIDIA Tesla P4 和 NVIDIA Tesla T4 显卡上,笔者测试了 LightSeq 的性能,选择了深度学习框架 Tensorflow v1.13 和解码场景支持较为丰富的 Faster Transformer v2.1 实现作为对比。Turbo Transformers 解码方法比较单一(只支持 Beam Search ,不支持文本生成中常用的采样解码),尚未满足实际应用需求,因此未作对比。
机器翻译性能
在机器翻译场景下,笔者测试了 Transformer base 模型(6层 encoder、6层 decoder 、隐层维度 512 )采用 beam search 解码的性能,实验结果如下:
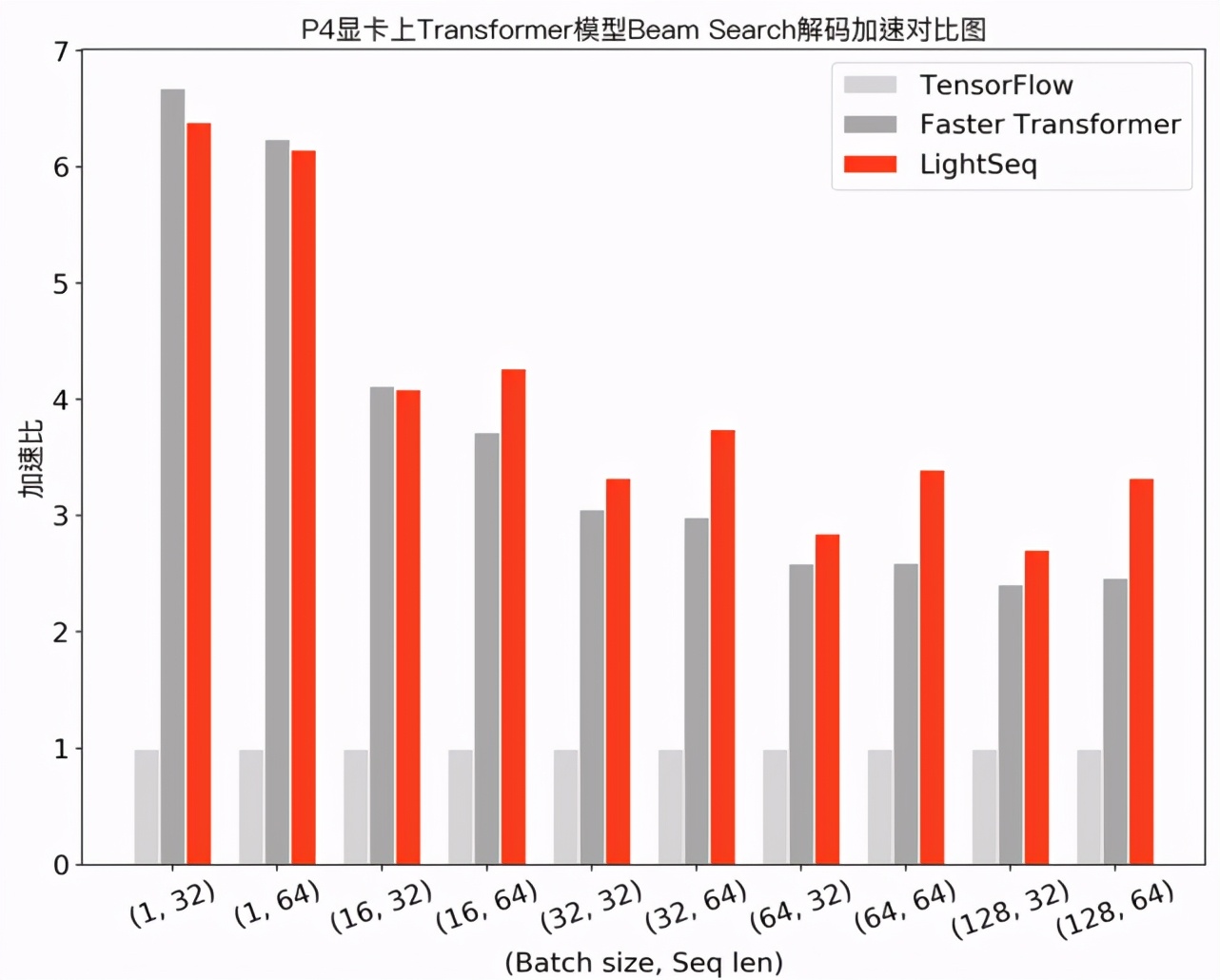
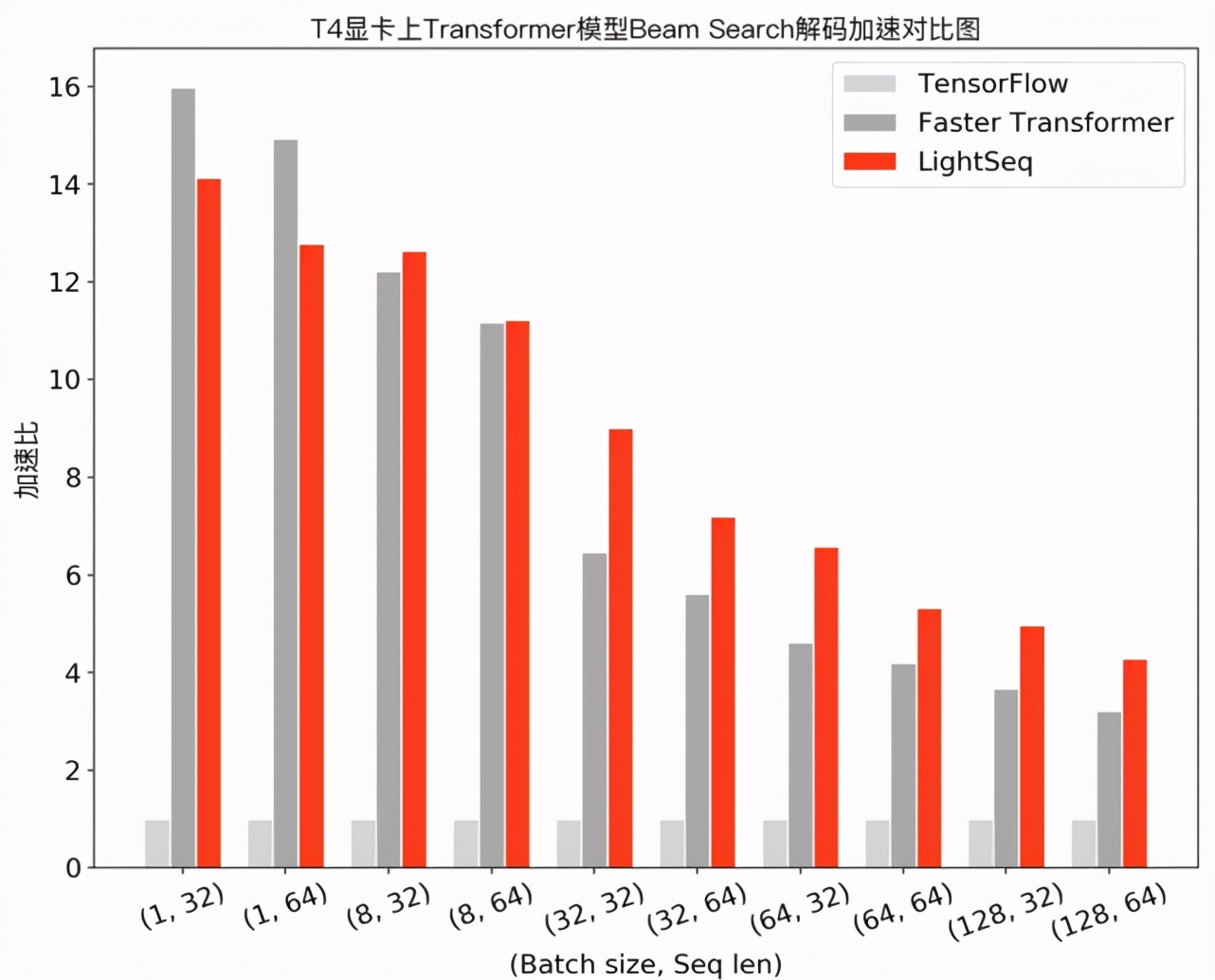
可以发现,在小 batch 场景下,Faster Transformer 和 LightSeq 对比 Tensorflow 都达到了 10 倍左右的加速。而随着 batch 的增大,由于矩阵乘法运算占比越来越高,两者对 Tensorflow 的加速比都呈衰减趋势。LightSeq 衰减相对平缓,特别是在大 batch 场景下更加具有优势,最多能比 Faster Transformer 快 1.4 倍。这也对未来的一些推理优化工作提供了指导:小 batch 场景下,只要做好非计算密集型算子融合,就可以取得很高的加速收益;而大 batch 场景下则需要继续优化计算密集型算子,例如矩阵乘法等。
最后在 WMT14 标准的法英翻译任务上,笔者测试了 Transformer big 模型的性能。LightSeq 在 Tesla P4 显卡上平均每句翻译延迟为 167ms ,Tesla T4 上减小到了 82ms。而作为对比, TensorFlow 延迟均为 1071ms,LightSeq 分别达到了 6.41 和 13.06 倍加速。另外,笔者尝试了其他多种模型配置,得到了比较一致的加速效率。例如更深层的模型结构上(encoder加深至 16 层),LightSeq 得到的加速比,分别是 6.97 和 13.85 倍。
文本生成性能
上述机器翻译通常采用 Beam Search 方法来解码, 而在文本生成场景,经常需要使用采样( Sampling )来提升生成结果的多样性。下图展示了 Transformer base 模型采用 top-k/top-p sampling 的性能测试对比:
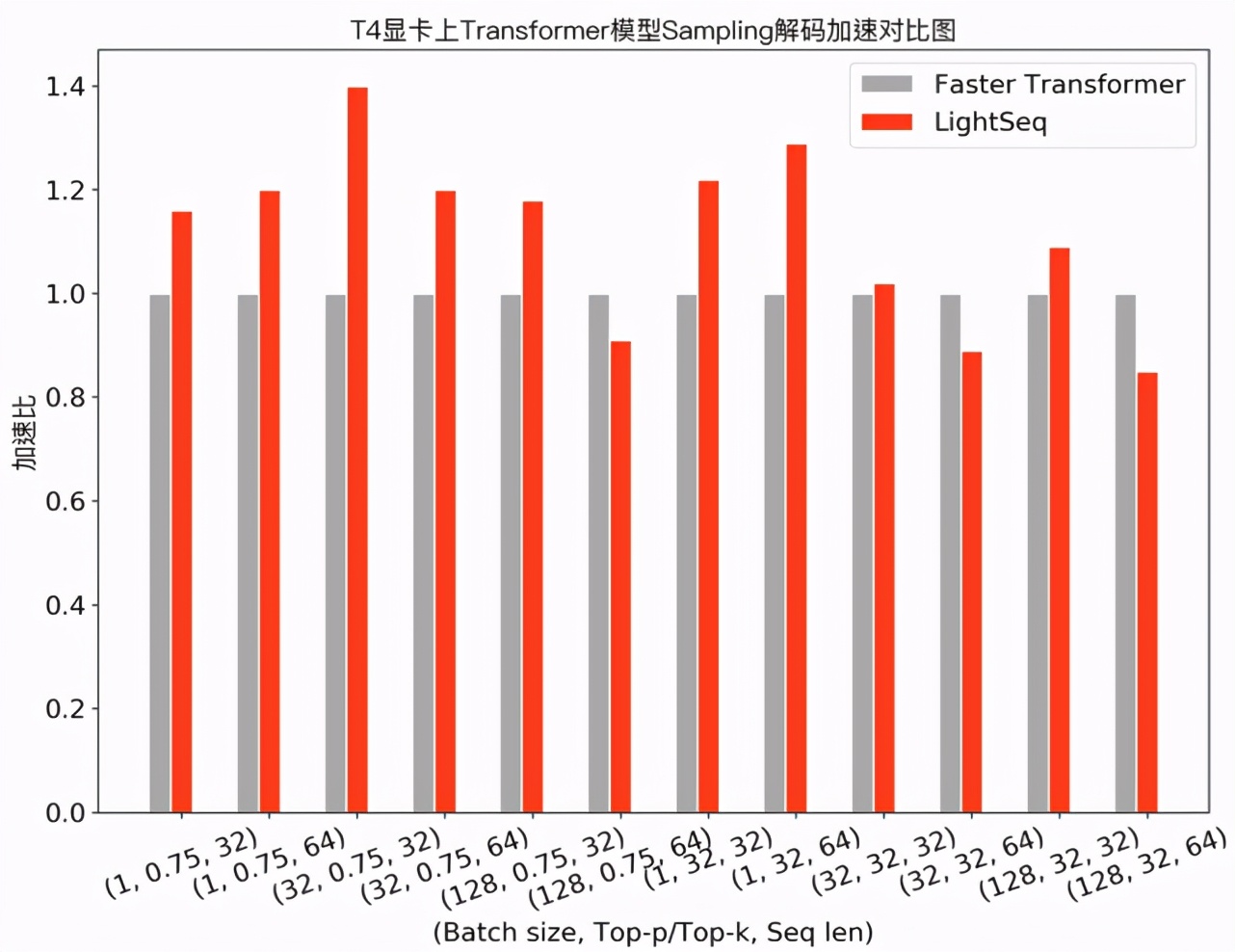
可以发现,在需要使用采样解码的任务中,LightSeq 在大部分配置下领先于 Faster Transformer,最多也能达到 1.4 倍的额外加速。此外,相比于 TensorFlow 实现,LightSeq 对 GPT 和 VAE 等生成模型也达到了 5 倍以上的加速效果。
服务压力测试
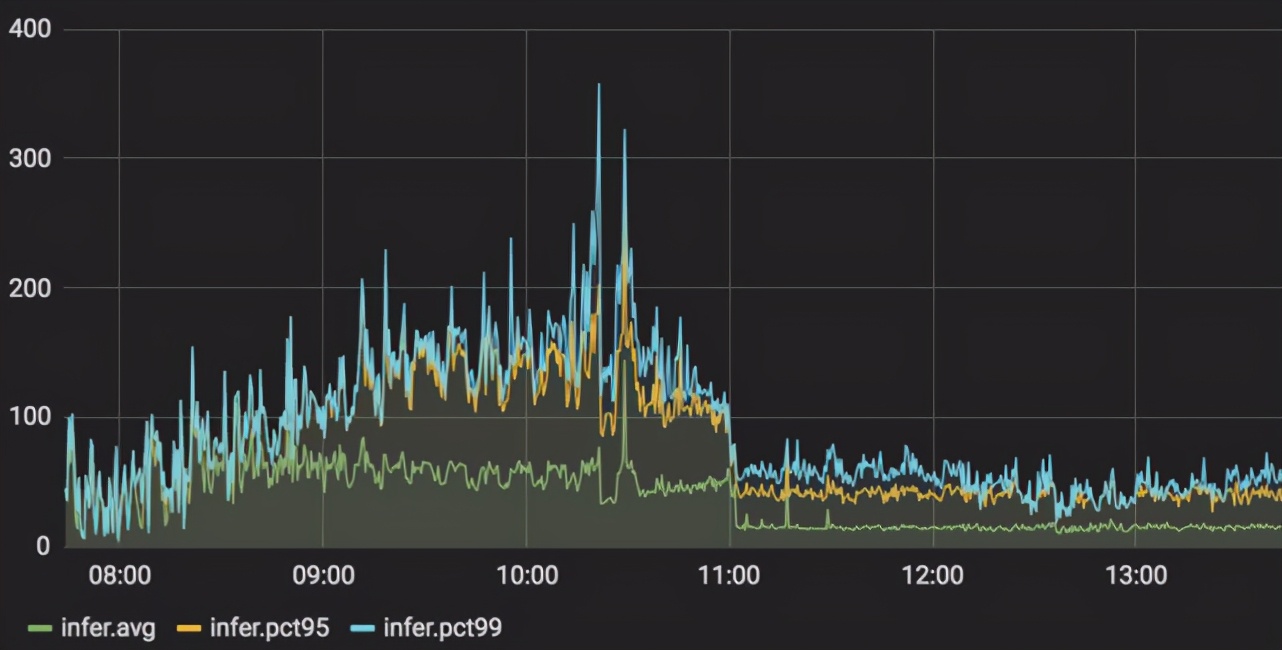
在云服务上,笔者测试了在实际应用中 GPT 场景下,模型服务从 Tensorflow 切换到LightSeq 的延迟变化情况(服务显卡使用 NVIDIA Tesla P4)。可以观察到,pct99 延迟降低了 3 到 5 倍,峰值从 360 毫秒左右下降到 80 毫秒左右,详细结果如下图所示:
更多的对比实验结果可以在 LightSeq 性能评测报告 [10] 中查看到。
技术原理
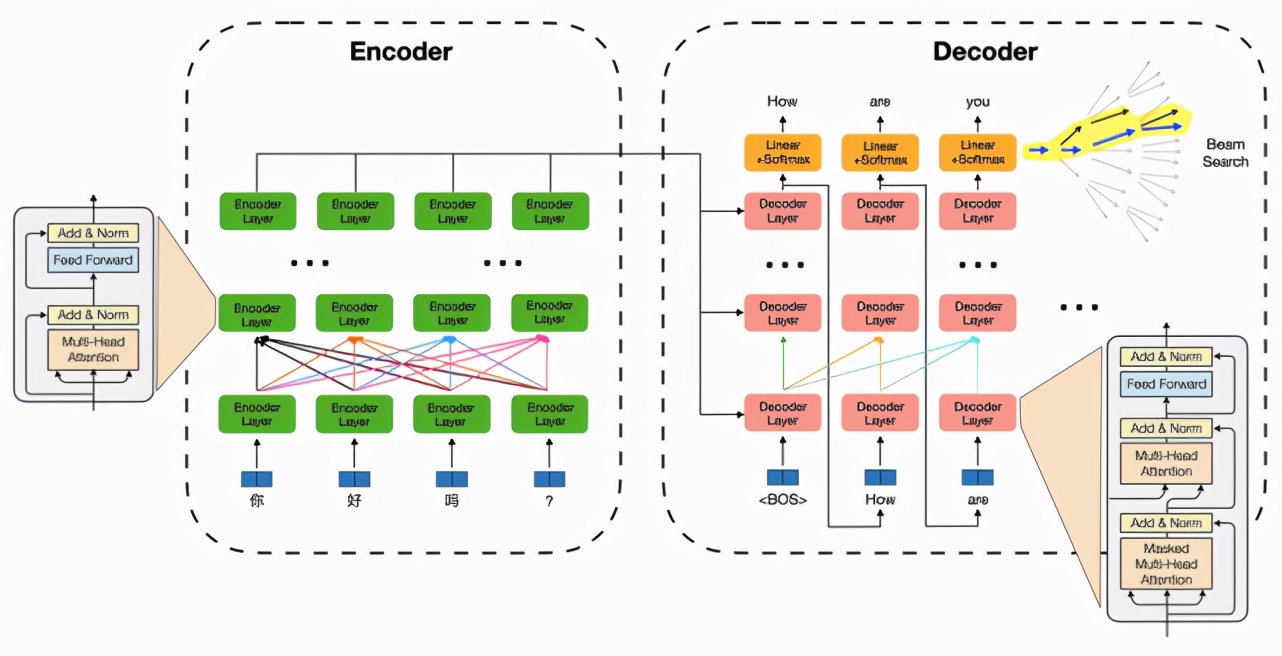
以 Transformer 为例,一个机器翻译/文本生成模型推理过程包括两部分:序列编码模块特征计算和自回归的解码算法。其中特征计算部分以自注意力机制及特征变换为核心(矩阵乘法,计算密集型),并伴随大量 Elementwise(如 Reshape)和 Reduce(如Layer Normalization)等 IO 密集型运算;解码算法部分包含了词表 Softmax、beam 筛选、缓存刷新等过程,运算琐碎,并引入了更复杂的动态 shape。这为模型推理带来了众多挑战:
1. IO 密集型计算的细粒度核函数调用带来大量冗余显存读写,成为特征计算性能瓶颈。
2. 复杂动态 shape 为计算图优化带来挑战,导致模型推理期间大量显存动态申请,耗时较高。
3. 解码生成每一步字符过程逻辑复杂,难以并行化计算从而发挥硬件优势。
LightSeq 取得这么好的推理加速效果,对这些挑战做了哪些针对性的优化呢?笔者分析发现,核心技术包括这几项:融合了多个运算操作来减少 IO 开销、复用显存来避免动态申请、解码算法进行层级式改写来提升推理速度。下面详细介绍下各部分的优化挑战和 LightSeq 的解决方法。
算子多运算融合
近年来,由于其高效的特征提取能力,Transformer encoder/decoder 结构被广泛应用于各种 NLP 任务中,例如海量无标注文本的预训练。而多数深度学习框架(例如 Tensorflow、Pytorch 等)通常都是调用基础运算库中的核函数(kernel function)来实现 encoder/decoder 计算过程。这些核函数往往粒度较细,通常一个组件需要调用多个核函数来实现。
以层归一化(Layer Normalization)为例,Tensorflow 是这样实现的:
- mean = tf.reduce_mean(x, axis=[-1], keepdims=True)variance = tf.reduce_mean(tf.square(x - mean), axis=[-1], keepdims=True)result = (x - mean) * tf.rsqrt(variance + epsilon) * scale + bias
可以发现,即使基于编译优化技术(自动融合广播(Broadcast)操作和按元素(Elementwise)运算),也依然需要进行三次核函数调用(两次 reduce_mean,一次计算最终结果)和两次中间结果的显存读写(mean 和 variance)。而基于 CUDA,我们可以定制化一个层归一化专用的核函数,将两次中间结果的写入寄存器。从而实现一次核函数调用,同时没有中间结果显存读写,因此大大节省了计算开销。有兴趣的同学可以在文末参考链接中进一步查看具体实现[11]。
基于这个思路,LightSeq 利用 CUDA 矩阵运算库 cuBLAS[12]提供的矩阵乘法和自定义核函数实现了 Transformer,具体结构如下图所示:
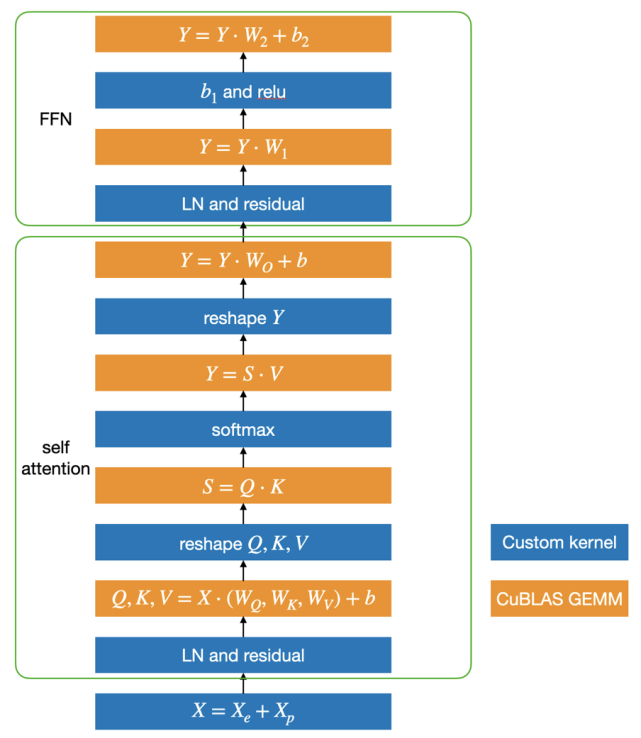
蓝色部分是自定义核函数,黄色部分是矩阵乘法。可以发现,矩阵乘法之间的运算全部都用一个定制化核函数实现了,因此大大减少了核函数调用和显存读写,最终提升了运算速度。
动态显存复用
为了避免计算过程中的显存申请释放并节省显存占用,LightSeq 首先对模型中所有动态的 shape 都定义了最大值(例如最大序列长度),将所有动态shape转换为静态。接着在服务启动的时候,为计算过程中的每个中间计算结果按最大值分配显存,并对没有依赖的中间结果共用显存。这样对每个请求,模型推理时不再申请显存,做到了:不同请求的相同 Tensor 复用显存;同请求的不同 Tensor 按 shape 及依赖关系复用显存。
通过该显存复用策略,在一张 T4 显卡上,LightSeq 可以同时部署多达 8 个 Transformer big 模型(batch_size=8,最大序列长度=8,beam_size=4,vocab_size=3万)。从而在低频或错峰等场景下,大大提升显卡利用率。
层级式解码计算
在自回归序列生成场景中,最复杂且耗时的部分就是解码。LightSeq 目前已经支持了 beam search、diversity beam search、top-k/top-p sampling 等多种解码方法,并且可以配合 Transformer、GPT使用,达到数倍加速。这里我们以应用最多的 beam search 为例,介绍一下 LightSeq 对解码过程的优化。
首先来看下在深度学习框架中传统是如何进行一步解码计算的:
# 1.计算以每个token为结尾的序列的log probability
- log_token_prob = tf.nn.log_softmax(logit) # [batch_size, beam_size, vocab_size]log_seq_prob += log_token_prob # [batch_size, beam_size, vocab_size]log_seq_prob = tf.reshape(log_seq_prob, [-1, beam_size * vocab_size])
# 2. 为每个序列(batch element)找出排名topk的token
- topk_log_probs, topk_indices = tf.nn.top_k(log_seq_prob, k=K)
# 3. 根据beam id,刷新decoder中的self attention模块中的key和value的缓存
- refresh_cache(cache, topk_indices)
可以发现,为了挑选概率 top-k 的 token ,必须在 [batch_size, beam_size, vocab_size]大小的 logit 矩阵上进行 softmax 计算及显存读写,然后进行 batch_size 次排序。通常 vocab_size 都是在几万规模,因此计算量非常庞大,而且这仅仅只是一步解码的计算消耗。因此实践中也可以发现,解码模块在自回归序列生成任务中,累计延迟占比很高(超过 30%)。
LightSeq 的创新点在于结合 GPU 计算特性,借鉴搜索推荐中常用的粗选-精排的两段式策略,将解码计算改写成层级式,设计了一个 logit 粗选核函数,成功避免了 softmax 的计算及对十几万元素的排序。该粗选核函数遍历 logit 矩阵两次:
• 第一次遍历,对每个 beam,将其 logit 值随机分成k组,每组求最大值,然后对这k个最大值求一个最小值,作为一个近似的top-k值(一定小于等于真实top-k值),记为R-top-k。在遍历过程中,同时可以计算该beam中logit的log_sum_exp值。
• 第二次遍历,对每个 beam,找出所有大于等于 R-top-k 的 logit 值,将(logit - log_sum_exp + batch_id * offset, beam_id * vocab_size + vocab_id)写入候选队列,其中 offset 是 logit 的下界。
在第一次遍历中,logit 值通常服从正态分布,因此算出的R-top-k值非常接近真实top-k值。同时因为这一步只涉及到寄存器的读写,且算法复杂度低,因此可以快速执行完成(十几个指令周期)。实际观察发现,在top-4设置下,根据R-top-k只会从几万token中粗选出十几个候选,因此非常高效。第二次遍历中,根据R-top-k粗选出候选,同时对 logit 值按 batch_id 做了值偏移,多线程并发写入显存中的候选队列。
粗选完成后,在候选队列中进行一次排序,就能得到整个batch中每个序列的准确top-k值,然后更新缓存,一步解码过程就快速执行完成了。
下面是k=2,词表大小=8的情况下一个具体的示例(列代表第几个字符输出,行代表每个位置的候选)。可以看出,原来需要对 16 个元素进行排序,而采用层级解码之后,最后只需要对 5 个元素排序即可,大大降低了排序的复杂度。

可视化分析计算延迟
为了验证上面几种优化技术的实际效果,笔者用 GPU profile 工具,对 LightSeq 的一次推理过程进行了延迟分析。下图展示了 32 位浮点数和 16 位浮点数精度下,各计算模块的延迟占比:
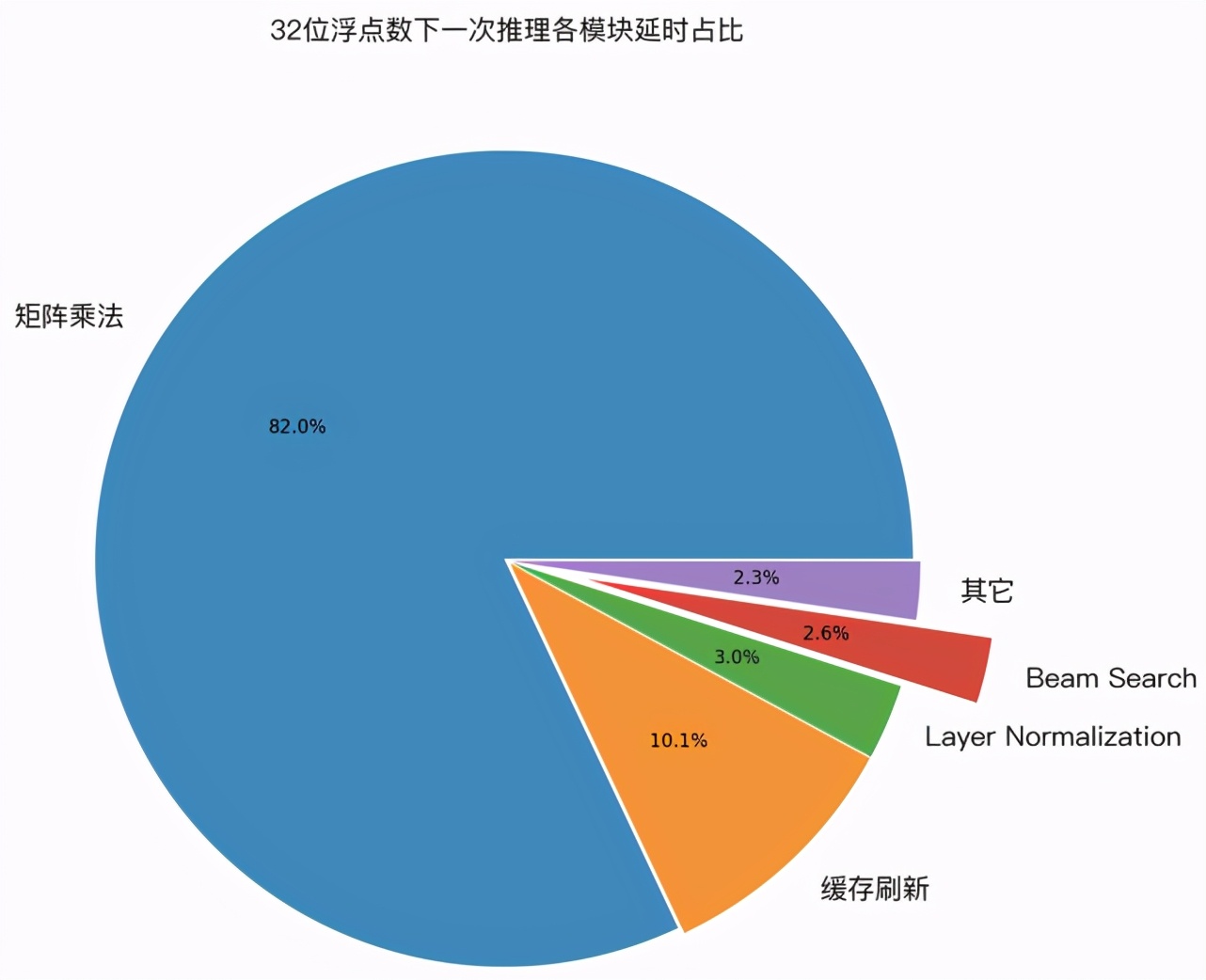
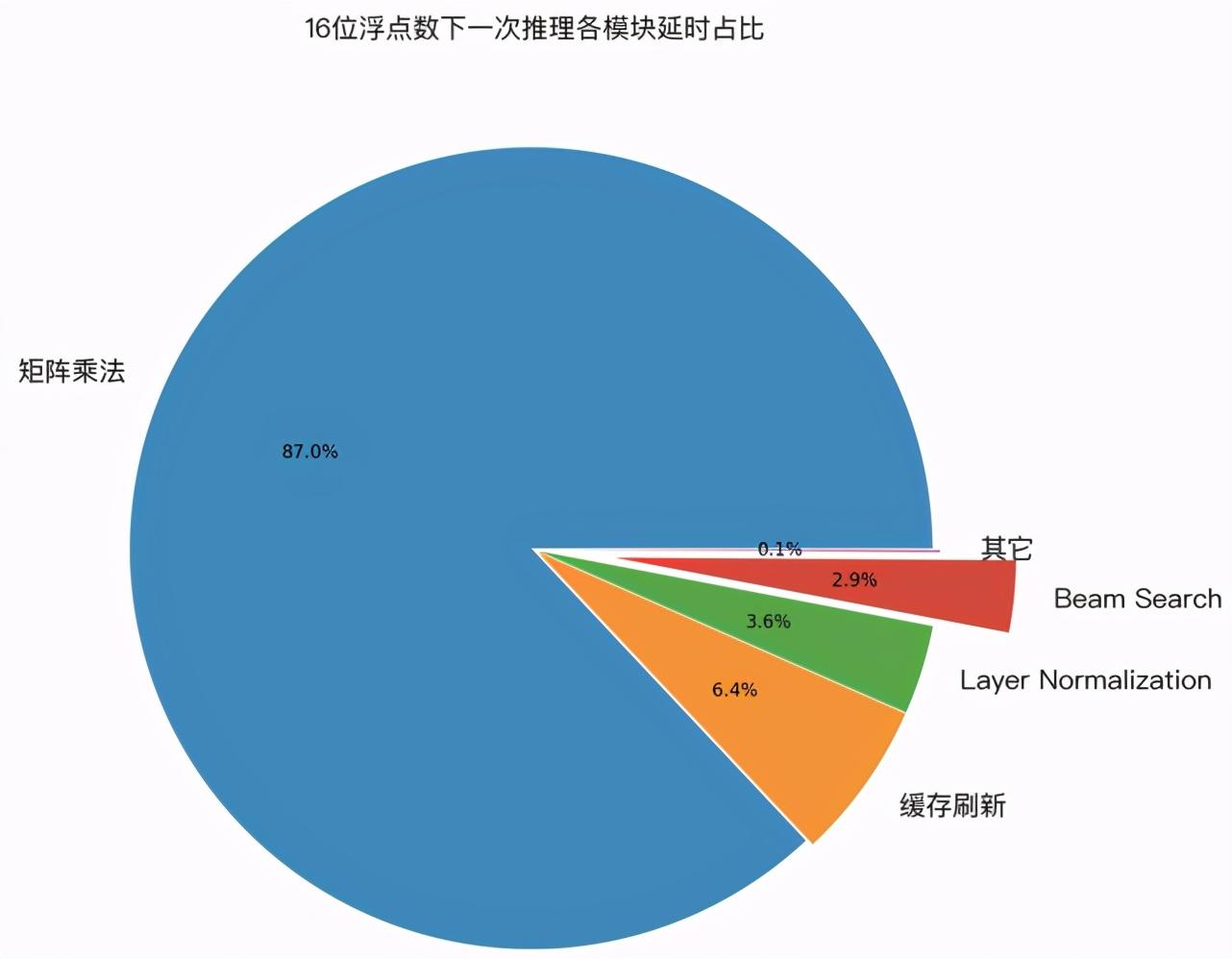
可以发现,在两种计算精度下:
1. 经过优化后,cuBLAS 中的矩阵乘法计算延迟分别占比 82% 和 88% ,成为推理加速新的主要瓶颈。而作为对比,我们测试了 Tensorflow 模型,矩阵乘法计算延迟只占了 25% 。这说明 LightSeq 的 beam search 优化已经将延迟降到了非常低的水平。
2. 缓存刷新分别占比 10% 和 6% ,比重也较高,但很难继续优化。今后可以尝试减少缓存量(如降低 decoder 层数,降低缓存精度等)来继续降低延迟。
3. 其他运算总计占比 8% 和 6% ,包括了 Layer Normalization、beam search 和中间结果的显存读写等。
可视化结果说明了 LightSeq 已经做到了极致优化,大大提升了推理速度。
传送门:
GitHub项目地址:
https://github.com/bytedance/lightseq





























