












雷锋网(公众号:雷锋网)按:前不久,在2020世界智能网联汽车大会上,中国工程院院士李骏做了主题为《中国智能网联汽车发展需要创新突破》的主题演讲。
从自动驾驶汽车发展需要新的技术路线、智能网联汽车发展需要新技术突破、智能网联汽车发展需要国家系统工程三个层面,他综合阐述了中国智能网联发展接下来的着力点。

雷锋网对李骏院士演讲内容进行了不改变原意的编辑整理,以下为全文:
结合目前国内外发展现状和趋势,我选了今天的演讲题目——《中国智能网联汽车发展需要创新突破》。
虽然目前有很多新技术发布,但还是需要实现真正的突破,而且应该走出中国自己的智能网联汽车技术路线。
自动驾驶汽车需要新的技术路线
美国SAE 2016年提出现代自动驾驶汽车的5级分类标准SAE J3016,也是自动驾驶的出处。
那么,这个出处是一个什么样的性质呢?
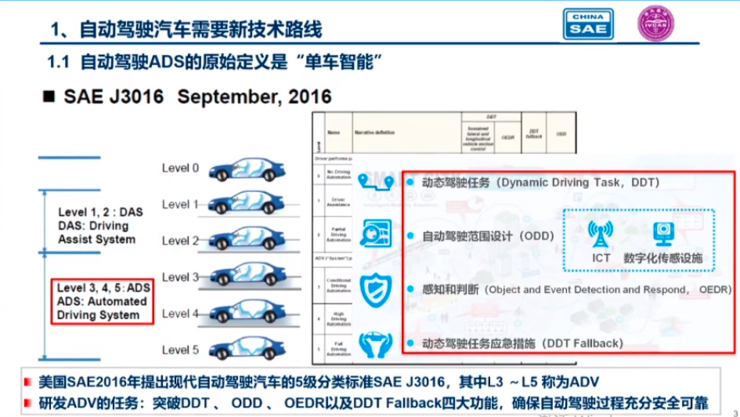
它的性质就是单车智能。因此这一点我们要看得清楚,它分为L1、L2、L3、L4、L5,主要的分级都是针对汽车本身的,所以它叫做“自动驾驶”。
这个词中翻译过来叫自动驾驶,通俗一点来讲就是单车智能。它定义了一台车要实现自动驾驶的四大整车特性,包括DDT、ODD、OEDR以及DDT Fallback。
因此可以看到,它从一开始定义自动驾驶的时候,就已经预测到了,这个车是不是在自动驾驶。
当然,自动驾驶车辆也有失败的时候,如果失败多了,就不能叫做自动驾驶了。这个标准出来之后,通过几年的突破大家发现一个问题,也就是单车智能行不行?
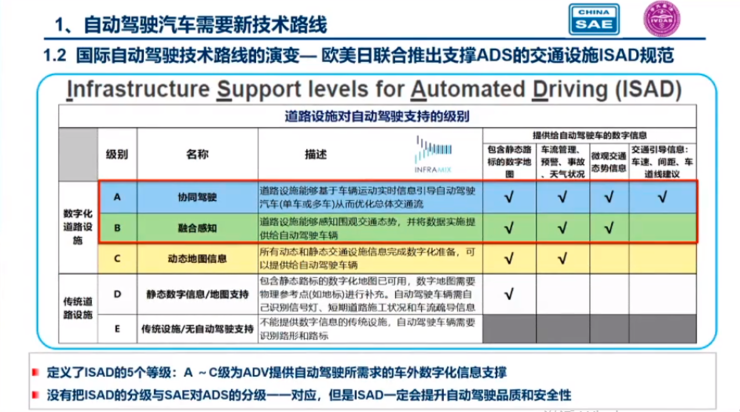
截至去年,全球有一个新的联盟成立,也就是欧盟、美国、日本联合成立了一个新的联盟,这个联盟提出了另外一个标准叫ISAD。
ISAD标准把车之外要支撑自动驾驶的设施分为了五级,这是国际对自动驾驶第二次提出国际性标准。
其中道路A级叫做参与到自动驾驶当中,也就是说那就不是单车智能。
因此,大家要注意到国际重大的趋势变化。
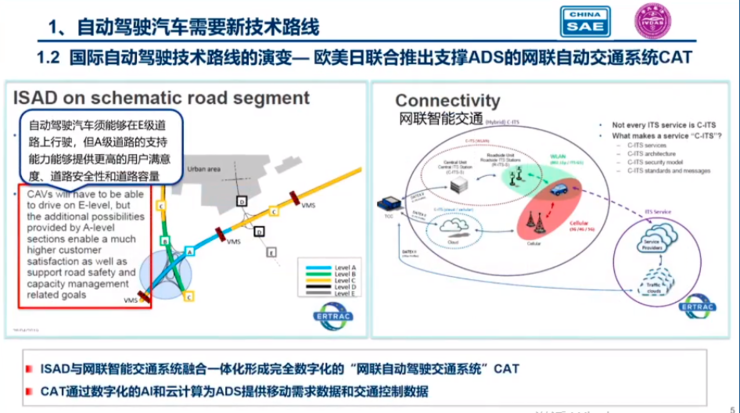
ISAD标准还把交通融入进来,因为汽车是交通的一分子。此外,它还把道路、交通和汽车的连接性引进来了,所以这些都是重大的趋势变化。
在这样的重大趋势变化之下,用什么来进行连接呢?
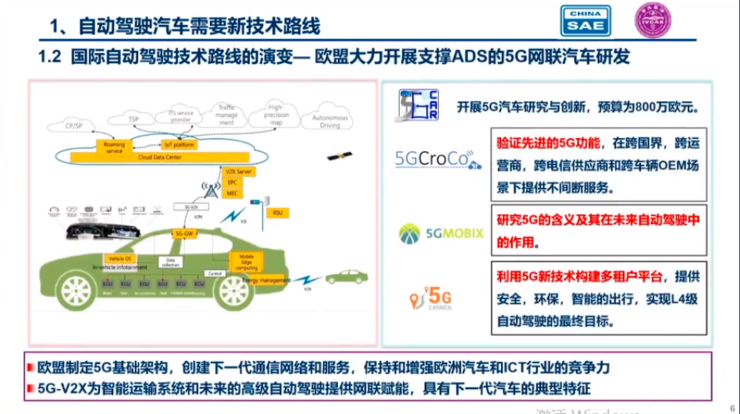
欧盟最先提出了5G汽车,也就是说用5G连接。
通俗一点来看,5G就是一个水管,它的作用就是能够把刚刚讲到的三者连接起来。
5G是中国的优势,但是目前我们的5G大多数还是在汽车的服务当中,并没有参与到驾驶中。
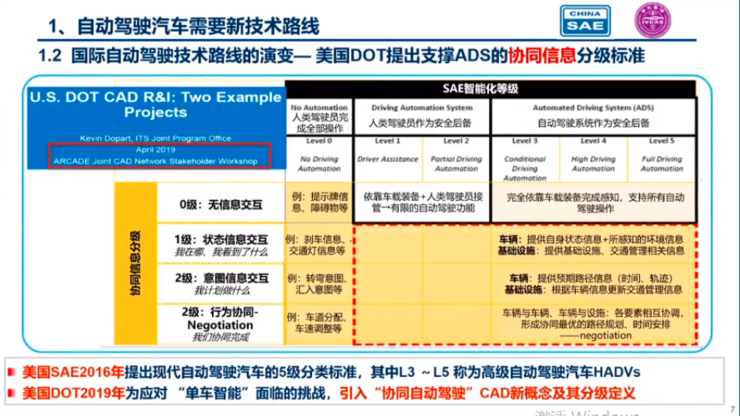
在这样一个大趋势下,美国DOT对它原来的L1、L2、L3进行了改进,它将车外赋能加入了原来单车智能的定义当中,把车外赋能分为三级:状态、趋势、行为协同。
此外,它把车外的加到了L3级以上,也就是说某种意义上,SAE已经趋向于不再仅仅是单车智能了。
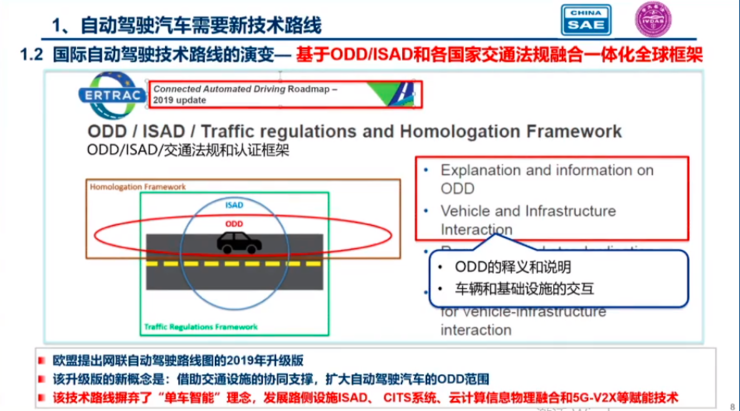
最后,ISO世界标准化组织正在商议一个全球一致的标准,它把ODD、ISAD和交通规则合在一起,建立一个新的全球自动驾驶汽车的标准框架,目前正在商议当中,这是一个非常大的国际背景。
在这样大的背景之下,中国的智能网联汽车如何发展?接下来我们重点讲下中国智能网联汽车如何突破。
智能网联汽车发展需要新技术突破
目前单车智能主要有两大类:
- 一类是以Waymo为主,就是以多线激光雷达为感知,我称之为饱和感知,这种饱和感知的最大优势就是它非常灵敏,其劣势是它对高精地图依赖性非常高,而且成本非常高。
- 另一类是以特斯拉为代表,基于视觉感知(依赖摄像头),主要是运用大量的人工智能和数据学习。

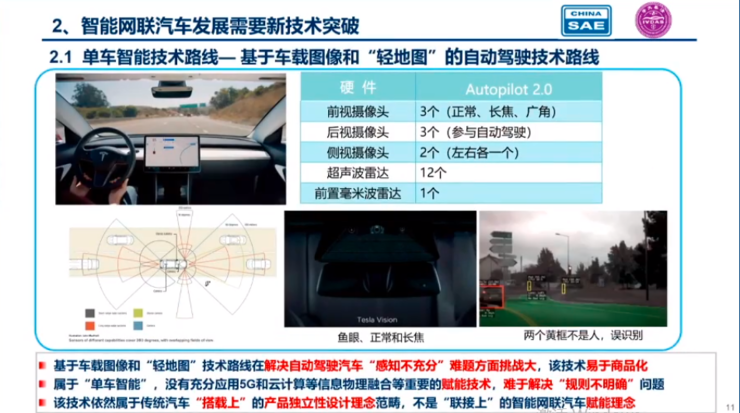
大家知道特斯拉的市值已经超过丰田成为世界第一大市值的汽车公司。这两类汽车路线都是只重视“使能”也就是汽车单车智能技术路线。
目前国内大多数的自动驾驶公司都是在这两个技术路线里,那么有没有其他的技术路线?
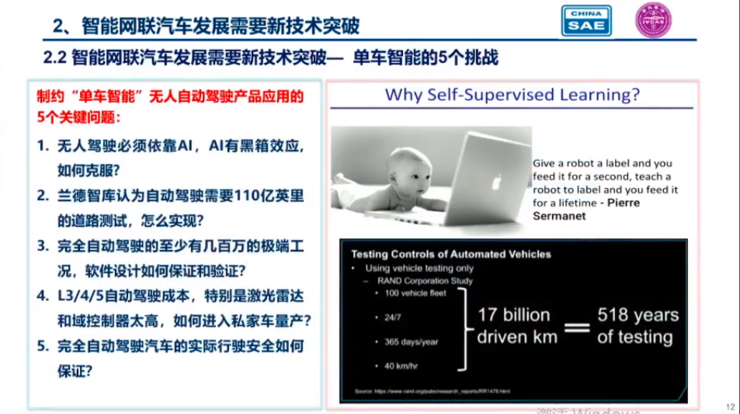
我们看到目前单车智能存在五大弱点:
- 无人驾驶必须要依靠AI,AI有黑箱效应,如何克服?
- 兰德智库认为自动驾驶需要110亿英里的道路测试,怎么实现?
- 完全自动驾驶至少有几百万的极端工况,软件设计如何保证和验证?
- L3、L4、L5自动驾驶成本很高,特别是激光雷达和域控制器太高,如何进入私家车量产?
- 完全自动驾驶汽车的实际行驶安全如何保证?目前自动驾驶汽车伤亡事故正在增加,而且它的社会问题比电池热失控更大。
针对以上五个问题,我提出了八项技术突破。
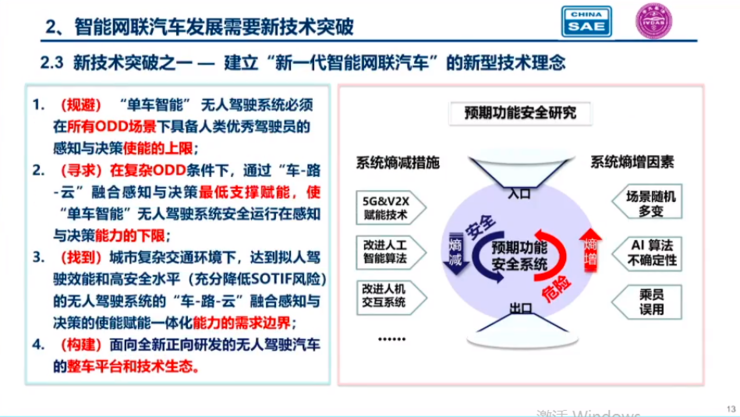
- 一是新型智能网联汽车理念,不能只是完全的单车智能。你要规避,单车智能总是在做自动驾驶的能力上限,能力上限是很难达到的。
- 二是要寻求,单车不智能不行,但是要压到下限。
- 三是要找到一个把车自己的自动驾驶能力和车外赋能联合在一起的边界,使得大家都便利。
- 四是按照这个技术路线进行正向开发汽车下一代产品,这是一个完全新的产品,而不是说在现有车上搭载就行的,这个要吸取新能源的教训,我们总是在搭载,因此新的技术理念非常重要。未来是熵的概念,自动驾驶汽车总是在熵增,重点是如何做到熵减。
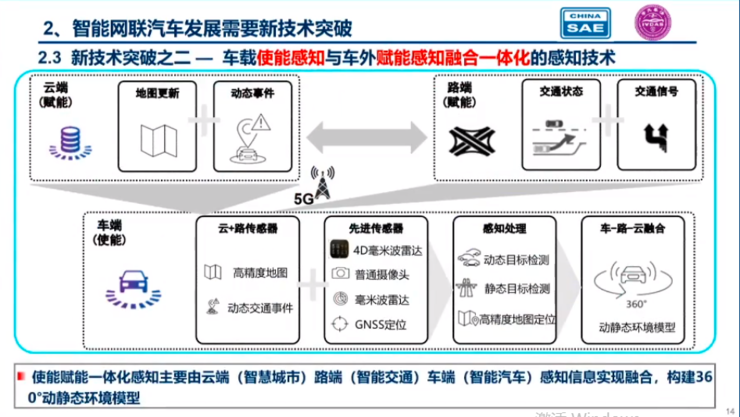
新技术突破之二是车载使能感知与车外赋能感知融合一体化的感知技术。
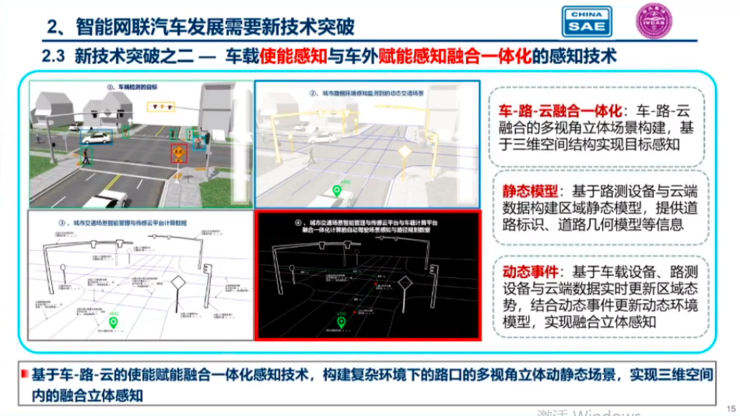
自动驾驶最难的就是过城市的十字路口。从上图中可以看到,过一个路口有一个场景,车内车外同时感觉到这个场景,然后同时数字化,把这个信息传递到汽车当中,让车载计算平台做最后的感知、规划、决策,这就叫使能、赋能融合一体化技术,目前还没有车可以做到这一点。
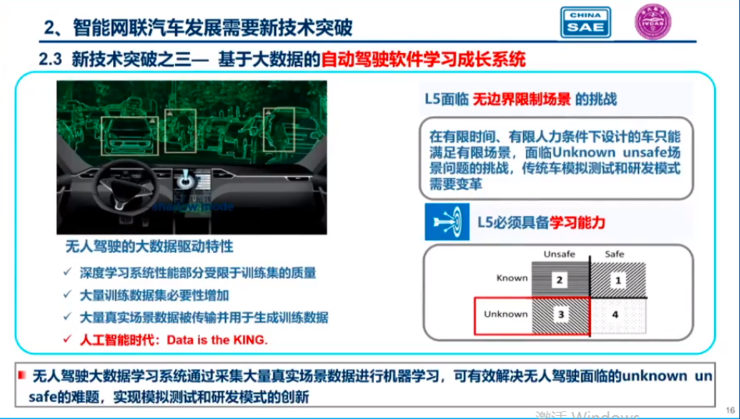
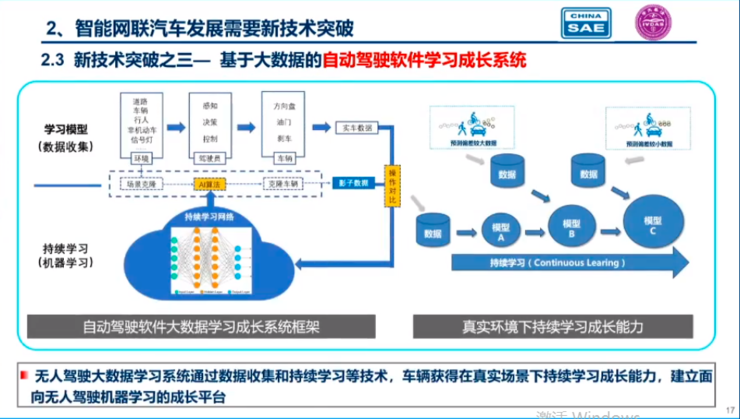
三是要进行学习。我曾提过一个观点就是软件定义汽车,数据开发汽车,芯片制造汽车。
没有数据是开发不了汽车的,过去传统汽车做汽车发动机标定也是要靠数据的。要建立这样一套自动驾驶软件学习成长系统。目前我们中国OEM、一级供应商在这方面值得反思的。
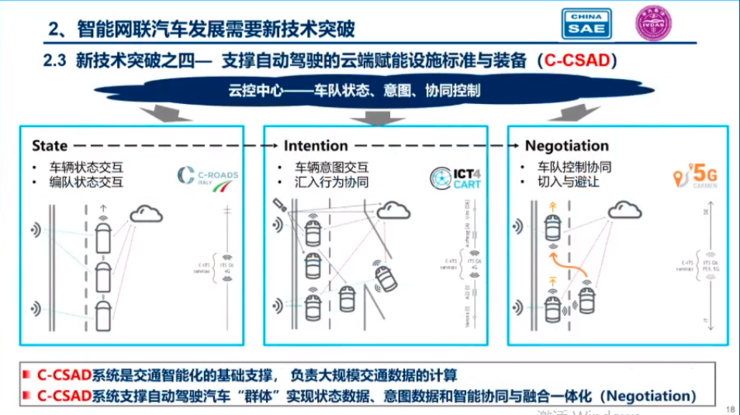
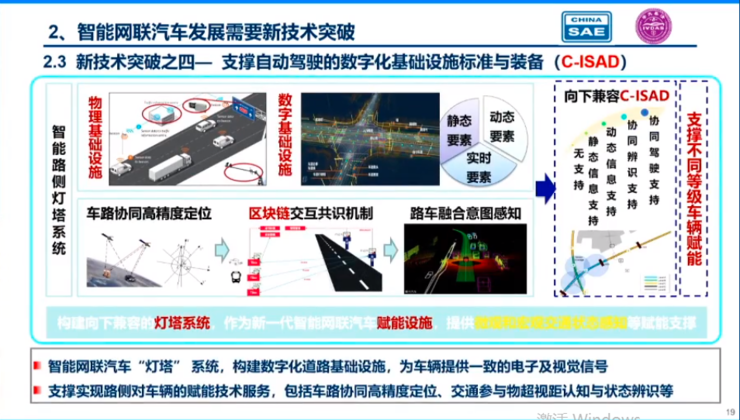
四是云,云是支撑。欧盟给出的三大支撑是非常明确的。支撑靠的是路侧设施,但是路侧设施必须要成为车自动驾驶感知的一部分,没有感知部分,路侧设施是没有用的,只给信息不参与驾驶也是没有用的。
五是安全。大家都知道功能安全,这是美国高速公路管理局给出的数字,功能安全只占0.7%,绝大多数原因为预期功能安全。
要解决安全问题,有三个大的措施。一是线下安全,你要找到一个解决安全的研发方法,二是成长学习,三是线上安全,我称之为安全大脑。安全要到车上去,不能只是在车下,不能总是在车下通过研发26个月、36个月,这是不可以了。
六是5G。5G不仅是V2X,5G汽车有三个商业模型,最核心的就是无人驾驶,5G汽车是一个复杂系统,它把汽车变成数字化汽车,5G汽车具有三大商品属性。5G汽车必须要弄清楚车的数据需求、数据结构和数据传输,然后才可以定义用什么5G。
七是芯片。现在我们注意到更多的是车载芯片,但是如果使能、赋能是一个系统的话,芯片就绝对不仅仅在车上,车外芯片一样重要。
八是测试。你必须要测试验证是成熟、安全的汽车才可以生产,中国安全分布的场景到底是什么?
到目前为止,我们并没有公布一套国家权威场景,那你这个车出去,保险公司就不敢给你保险,保险公司不敢给你保险,车就卖不出去。因为你必须要知道什么东西是非常小概率发生的场景,你不能总是开放道路,必须要建实验室。
目前我们国家在高度自动驾驶实验室和测试技术方面是落后的,这个要引起我们高度重视,国外现在已经非常发达了,但是知道如果是没有一个开发实验室和开发工具的话,汽车是不会生产的。
智能网联汽车发展需国家系统工程
首先要找到一个理论,这个理论叫SOS(system of system)—是由有限个独立可操作的系统组成一个整体,这些系统相互连接,能够达到更高的目标。
我们自动驾驶是一个非常大的系统工程,它也是一个国家工程。比如美国把它摆入国家工程,欧盟把5G汽车定为国家工程,也制定了时间表、路线图。
我建议中国也要有自己的中国智能网联汽车标准,有中国的场景标准、地图标准、通信标准、交通标准和安全标准,而且不能仅仅是单车智能。
中国智能汽车国家工程应该有宏观布局、中观布局、微观布局,要强大四大融合,也就是智慧城市、智能交通、智慧能源、智能汽车融为一体。要突破前瞻性技术和颠覆性技术,走出一条自己的道路。
结语
今年中国科协发布2020年重大科学问题和工程技术难题已经指出,数字化交通基础设施如何推动自动驾驶和车路协同是重大科学问题,一个国家的重大科学问题必须是国家工程。如何把自动驾驶上升为国家工程,走出自己的创新道路,只有抓住这样一个抓手,中国智能网联汽车才能走向世界的前沿。
本文转自雷锋网,如需转载请至雷锋网官网申请授权。















