大家还记得这张图吗?
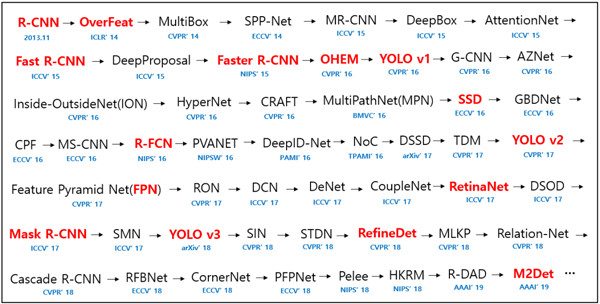
深度系统介绍了 52 个目标检测模型,纵观 2013 年到 2020 年,从最早的 R-CNN、OverFeat 到后来的 SSD、YOLO v3 再到去年的 M2Det,新模型层出不穷,性能也越来越好!
上文聚焦于源码和论文,对于各种卷积神经网络模型的实现,本文将介绍它们的 PyTorch 实现,非常有用!
这份资源已经开源在了 GitHub 上,链接如下:
https://github.com/shanglianlm0525/PyTorch-Networks
先来个总结介绍,该系列的卷积神经网络实现包含了 9 大主题,目录如下:
1. 典型网络
2. 轻量级网络
3. 目标检测网络
4. 语义分割网络
5. 实例分割网络
6. 人脸检测和识别网络
7. 人体姿态识别网络
8. 注意力机制网络
9. 人像分割网络
下面具体来看一下:
1. 典型网络(Classical network)
典型的卷积神经网络包括:AlexNet、VGG、ResNet、InceptionV1、InceptionV2、InceptionV3、InceptionV4、Inception-ResNet。
以 AlexNet 网络为例,AlexNet 是 2012 年 ImageNet 竞赛冠军获得者 Hinton 和他的学生 Alex Krizhevsky 设计的。AlexNet 中包含了几个比较新的技术点,也首次在 CNN 中成功应用了 ReLU、Dropout 和 LRN 等 Trick。同时 AlexNet 也使用了 GPU 进行运算加速。
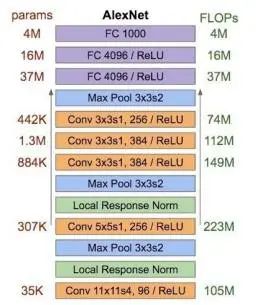
AlexNet 网络结构的 PyTorch 实现方式如下:
- import torch
- import torch.nn as nn
- def Conv3x3BNReLU(in_channels,out_channels,stride,padding=1):
- return nn.Sequential(
- nn.Conv2d(in_channelsin_channels=in_channels, out_channelsout_channels=out_channels, kernel_size=3, stridestride=stride, padding=1),
- nn.BatchNorm2d(out_channels),
- nn.ReLU6(inplace=True)
- )
- def Conv1x1BNReLU(in_channels,out_channels):
- return nn.Sequential(
- nn.Conv2d(in_channelsin_channels=in_channels, out_channelsout_channels=out_channels, kernel_size=1, stride=1, padding=0),
- nn.BatchNorm2d(out_channels),
- nn.ReLU6(inplace=True)
- )
- def ConvBNReLU(in_channels,out_channels,kernel_size,stride,padding=1):
- return nn.Sequential(
- nn.Conv2d(in_channelsin_channels=in_channels, out_channelsout_channels=out_channels, kernel_sizekernel_size=kernel_size, stridestride=stride, paddingpadding=padding),
- nn.BatchNorm2d(out_channels),
- nn.ReLU6(inplace=True)
- )
- def ConvBN(in_channels,out_channels,kernel_size,stride,padding=1):
- return nn.Sequential(
- nn.Conv2d(in_channelsin_channels=in_channels, out_channelsout_channels=out_channels, kernel_sizekernel_size=kernel_size, stridestride=stride, paddingpadding=padding),
- nn.BatchNorm2d(out_channels)
- )
- class ResidualBlock(nn.Module):
- def __init__(self, in_channels, out_channels):
- super(ResidualBlock, self).__init__()
- mid_channels = out_channels//2
- self.bottleneck = nn.Sequential(
- ConvBNReLU(in_channelsin_channels=in_channels, out_channels=mid_channels, kernel_size=1, stride=1),
- ConvBNReLU(in_channels=mid_channels, out_channels=mid_channels, kernel_size=3, stride=1, padding=1),
- ConvBNReLU(in_channels=mid_channels, out_channelsout_channels=out_channels, kernel_size=1, stride=1),
- )
- self.shortcut = ConvBNReLU(in_channelsin_channels=in_channels, out_channelsout_channels=out_channels, kernel_size=1, stride=1)
- def forward(self, x):
- out = self.bottleneck(x)
- return out+self.shortcut(x)
2.轻量级网络(Lightweight)
轻量级网络包括:GhostNet、MobileNets、MobileNetV2、MobileNetV3、ShuffleNet、ShuffleNet V2、SqueezeNet Xception MixNet GhostNet。

以 GhostNet 为例,同样精度,速度和计算量均少于此前 SOTA 算法。GhostNet 的核心是 Ghost 模块,与普通卷积神经网络相比,在不更改输出特征图大小的情况下,其所需的参数总数和计算复杂度均已降低,而且即插即用。

GhostNet 网络结构的 PyTorch 实现方式如下:
https://github.com/shanglianlm0525/PyTorch-Networks/blob/master/Lightweight/GhostNet.py
3. 目标检测网络(ObjectDetection)
目标检测网络包括:SSD、YOLO、YOLOv2、YOLOv3、FCOS、FPN、RetinaNet Objects as Points、FSAF、CenterNet FoveaBox。
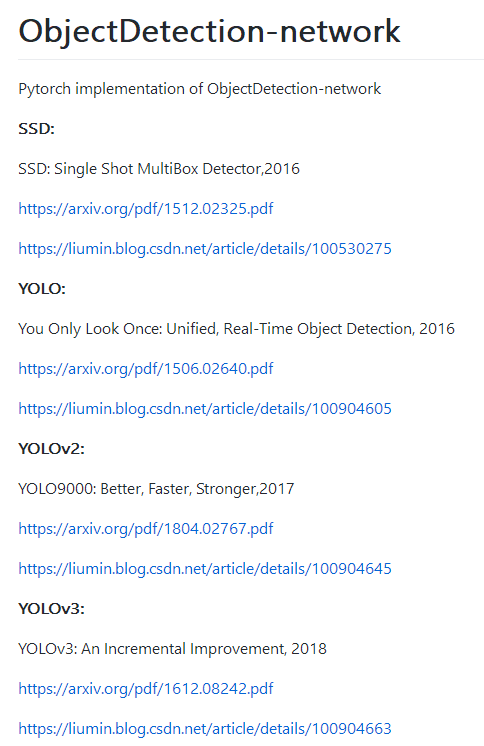
以 YOLO 系列为例,YOLO(You Only Look Once)是一种基于深度神经网络的对象识别和定位算法,其最大的特点是运行速度很快,可以用于实时系统。目前 YOLOv3 应用比较多。
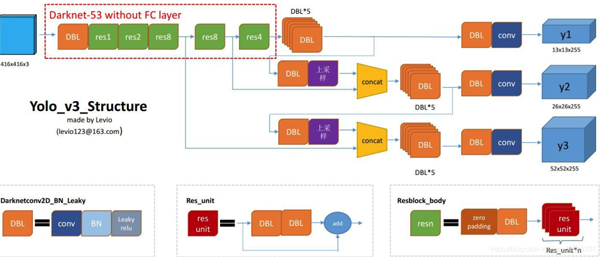
YOLOV3 网络结构的 PyTorch 实现方式如下:
https://github.com/shanglianlm0525/PyTorch-Networks/blob/master/ObjectDetection/YOLOv3.py
4. 语义分割网络(SemanticSegmentation)
语义分割网络包括:FCN、Fast-SCNN、LEDNet、LRNNet、FisheyeMODNet。
以 FCN 为例,FCN 诞生于 2014 的语义分割模型先驱,主要贡献为在语义分割问题中推广使用端对端卷积神经网络,使用反卷积进行上采样。FCN 模型非常简单,里面全部是由卷积构成的,所以被称为全卷积网络,同时由于全卷积的特殊形式,因此可以接受任意大小的输入。
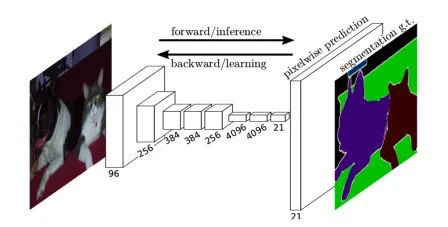
FCN 网络结构的 PyTorch 实现方式如下:
https://github.com/shanglianlm0525/PyTorch-Networks/blob/master/SemanticSegmentation/FCN.py
5. 实例分割网络(InstanceSegmentation)
实例分割网络包括:PolarMask。
6. 人脸检测和识别网络(commit VarGFaceNet)
人脸检测和识别网络包括:FaceBoxes、LFFD、VarGFaceNet。
7. 人体姿态识别网络(HumanPoseEstimation)
人体姿态识别网络包括:Stacked Hourglass、Networks Simple Baselines、LPN。
8. 注意力机制网络
注意力机制网络包括:SE Net、scSE、NL Net、GCNet、CBAM。
9. 人像分割网络(PortraitSegmentation)
人像分割网络包括:SINet。
综上,该 GitHub 开源项目展示了近些年来主流的 9 大类卷积神经网络,总共包含了几十种具体的网络结构。其中每个网络结构都有 PyTorch 实现方式。还是很不错的。